ardupilot开发 --- 机载计算机-软件方案 篇
马儿跑马儿不吃草
- 0. 概述
- APSync
- BlueOS
- DroneKit
- FlytOS
- Maverick
- ROS
- Rpanion-server
- 结论
0. 概述
The Companion Computer software refers to the programs and tools that run on the Companion Computer. They will take in MAVLink telemetry from the Flight Controller and can route and process the telemetry data. Specific tutorials for popular Companion Computer software tools/suites are listed below.
- APSync
- BlueOS
- DroneKit
- FlytOS
- Maverick
- ROS
- Rpanion-server
应该选哪个方案好呢??????
APSync
提供日志下载和视频流转发到地面站的功能;
机载计算机通过串口与飞控连接,将飞控的log转存到自己的文件系统中,并创建一个网络热点,用于给运行地面站的PC连接,PC连接该热点后可以:1)从机载计算机下载日志;2)查看视频流;3)连接热点后地面站可以通过UDP连接到飞控;4)PC连接热点后可通过SSH工具来连接到机载计算机的cmd/bash/shell/命令窗口;
BlueOS
BlueOS是一个模块化、强大且高效的平台,用于通过车载计算机管理 vehicle 或 robot。BlueOS是模块化的核心,这使它具有可移植性、更新健壮性和可扩展性。
有哪些特性?
目前是有一些基本的功能,没有视觉定位、视觉避障、SLAM等功能。
- 参考:https://blueos.cloud/docs/blueos/1.2/overview/#feature-comparison
- Onboard Computer
- Flight Controller
- Video Streams
- WIFI Manager
- Ethernet Manager
- Notification system
- File Browser
- Log Browser
- MAVLink inspector
- Network test
- System information
- Web Terminal
- Autopilot Firmware
- Autopilot Parameters
- Version Chooser
- MAVLink Endpoints
- NMEA support
- Ping Sonar Devices
- Serial Bridges
- Water Linked
- Extensions
DroneKit
DroneKit-Python allows you to control ArduPilot using the Python programming language.
DroneKit-Python’s documentation
特性:
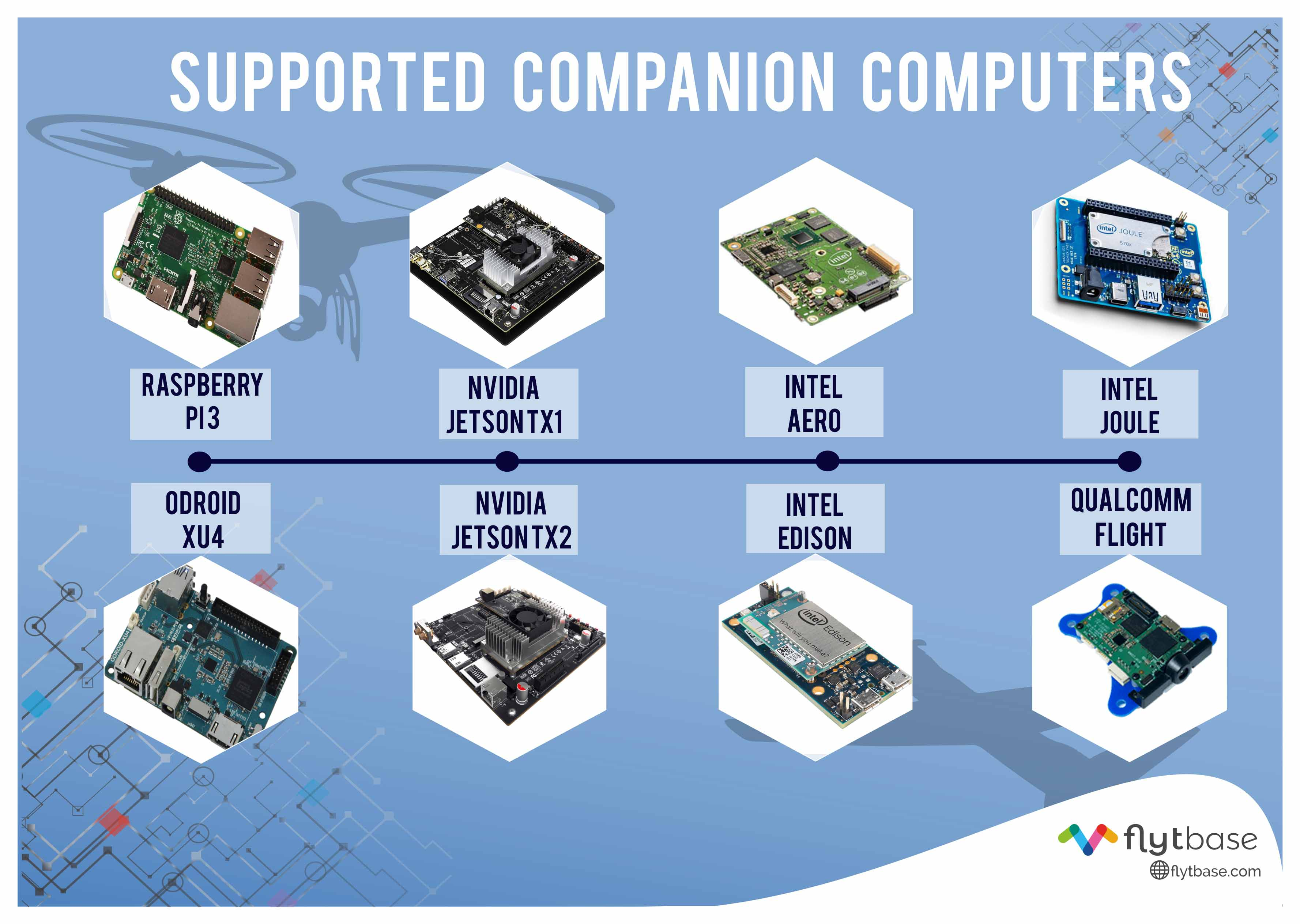
FlytOS
FlytOS是一个软件框架,提供无人机API和SDK,用于构建高水平的无人机应用程序,如空中运输、精准农业、勘测、摄影、工业检测和灾害管理。它旨在使无人机开发人员能够使用其开放API构建高级无人机应用程序。
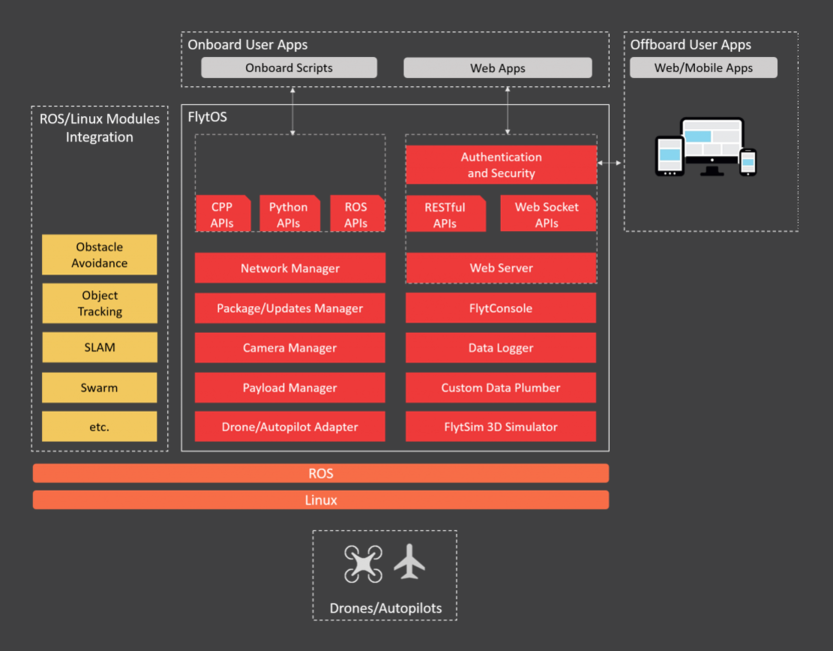
FlytOS基于Linux和ROS,是构建商业和科研无人机应用程序的理想平台。它支持多种硬件平台,如Raspberry Pi 3、Odroid XU4、Nvidia TX1、Intel Edison、Intel Aero和FlytPOD。它使用MAVLink与飞控通信,并在ROS、CPP、Python、REST和Websocket中暴露高级FlytAPI。
这使得使用计算机视觉、机器学习和云连接构建高级应用程序变得容易,FlytOS旨在为无人机应用程序开发人员提供一种与无人机对话的标准语言。
- 支持的硬件平台:
- 模块化结构
- 一些应用场景
- Vision-based Object-Tracking and Following 基于视觉的目标跟踪
- Deep Learning with Nvidia 机器学习
- GPS based Object Following 目标跟踪
- SONAR based obstacle detection 基于声呐的障碍物检测
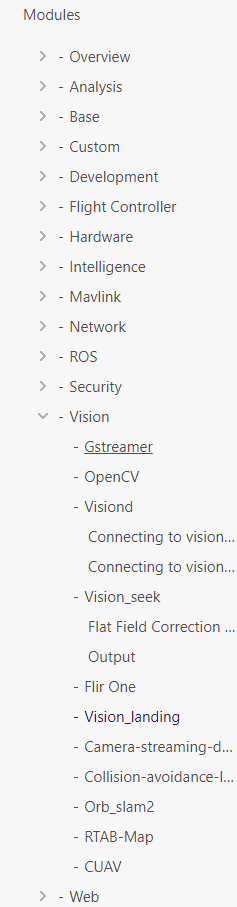
Maverick
Maverick是一个用于创建、维护和控制无人机机载计算机的系统。
Maverick没有为每种不同类型的计算机和操作系统创建、分发和维护单独的逻辑和大型完整的操作系统映像以及包存储库,而是允许通过更熟悉的编码和github工作流程敏捷、协作地开发配套计算机,并且与操作系统和硬件无关。在任何受支持的计算机上,在任何受支撑的操作系统上都会创建相同的环境,因此底层平台在很大程度上变得无关紧要。
为了方便起见,Maverick提供了易于安装的操作系统映像,但只需几K的github代码就可以完全安装。当使用Maverick开发新功能时,只需一个命令即可快速安全地更新现有安装,而不会对数据或运行的服务造成任何干扰。
希望通过在很大程度上自动化并将复杂的系统安装和配置简化为简单的安装,这将有助于减少潜在无人机开发人员的进入障碍,他们可以快速开始使用完整的开发堆栈。
特性:
ROS
特性:

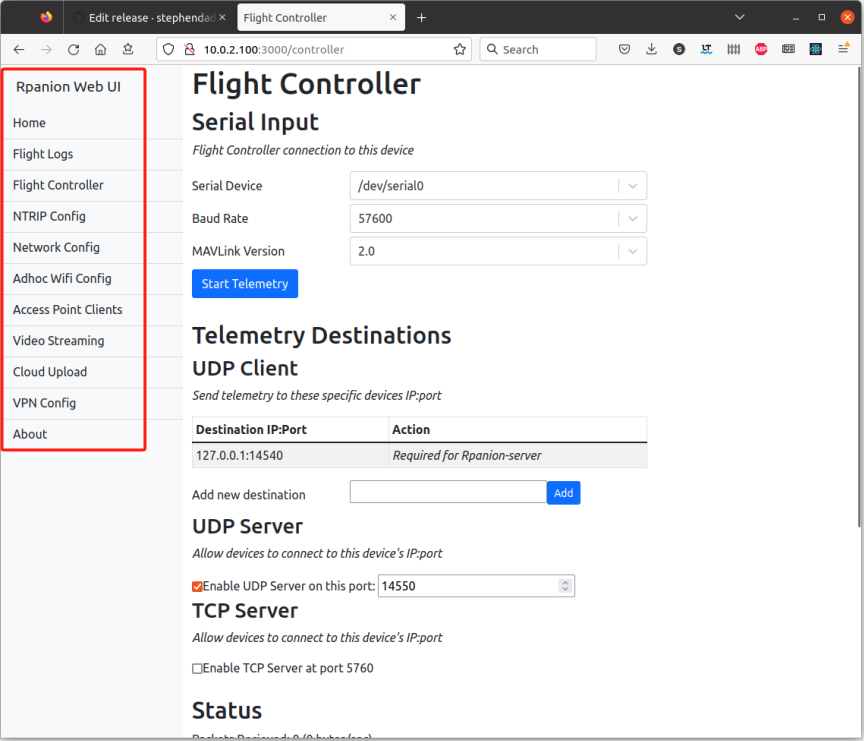
Rpanion-server
Rpanion Server 是一个用于配套计算机(如Raspberry Pi)的开源软件包,它提供了一个基于网络的接口,用于配置网络、遥测(MAVLink)路由和从连接的飞行控制器进行日志记录。
结论
推荐使用Maverick方案,因为Maverick方案不仅包含了ROS、视觉方案(如避障和SLAM),还拥有其他方案的特性如视频流、log、云服务、无线热点、飞控控制等功能。
最终方案:
- APSync+ROS+Visp+Rpanion-server
- 或
- APSync+ROS+Maverick