PID控制与模糊PID控制的比较
一、PID控制器的设计
1.PID控制原理图:
PID控制其结构框图如下图所示:
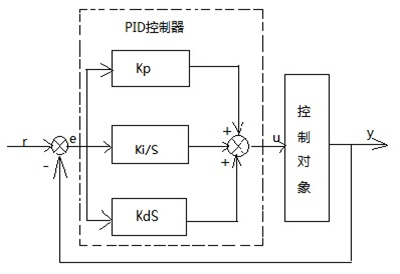
图1:PID控制器结构框图
2.PID控制器传递函数的一般表达式
PID控制器传递函数的一般表达形式为:
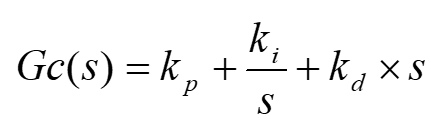
其中kp为比例增益;ki为积分增益;kd为微分增益。
调整PID参数,以满足系统要求,从而使被控对象有更优良的动态响应和静态响应。
比例环节:根据偏差量成比例的调节系统控制量,以此产生控制作用,减少偏差。比例系数的作用是增加系统响应的速度,比例系数越大,系统响应越快,但系统容易产生超调,比例系数过小,会影响系统调节的精度,系统响应时间变长,系统的动态响应变差。
积分环节:用于消除静差,提高系统的无差度,积分时间常数决定着积分环节作用的强度,但是积分作用过强的话会影响系统的稳定性。
微分环节:根据偏差量的变化趋势来调节系统控制量,在偏差信号发生较大变化之前,提早引入一个校正信号,起到加快系统动作速度,减少调节时间的作用,调节微分参数需要注意微分作用太强可能会引起系统振荡。
二、模糊PID控制器的设计
1.模糊控制原理图
模糊控制器结构框图如下图所示:

图3:模糊控制器结构框图
上面为模糊控制器的原理图,实际上模糊控制器的输出并非真正的控制信号,而是作为PID的参数。所以完整的模糊PID控制器框图应该需要包含PID控制的部分,如下图所示:
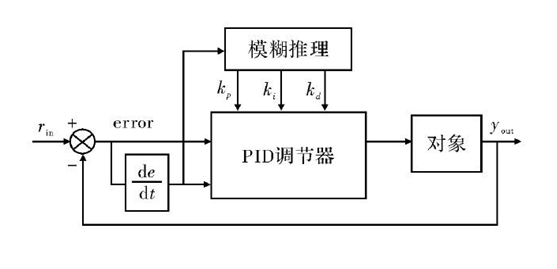
其中模糊推理部分即上面的模糊控制器,PID调节器才是真正起作用的控制器,而模糊控制器的作用是在线实时调整PID参数。
2.模糊控制器传递函数一般表达形式
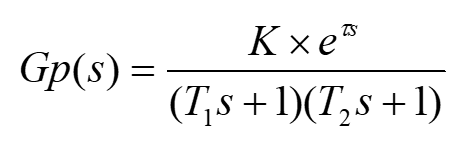
一个典型工业过程通常可以等效为二阶系统加上一个非线性环节(如纯滞后),给出如下经典控制对象传递函数的一般形式:
其中模糊控制规则是模糊控制器的核心,是设计控制系统的主要内容。
一个基本模糊控制器主要有三个功能:
(1)模糊化:把精确量(如偏差e和偏差变化ec)转化为相应的模糊量(E、EC);
(2)模糊推理:按总结的语言规则(模糊控制规划表)进行模糊推理;
(3)模糊判决:把推理结果(U)从模糊量转化为可以用于实际控制的精确量(u)。
模糊规则是由一系列的模糊条件语句组成的,即由许多模糊蕴含关系构成。这些条件语句是推理的出发点和得到的正确结论的根据和基础。每条模糊条件语句都给出模糊蕴含关系,即一条控制规则。若有n条规则,就把它们表达的n个模糊蕴含关系(i=l,2,⋯,n)做并运算,构成系统总的模糊蕴含关系:

三、系统仿真
本文采用的传递函数为:
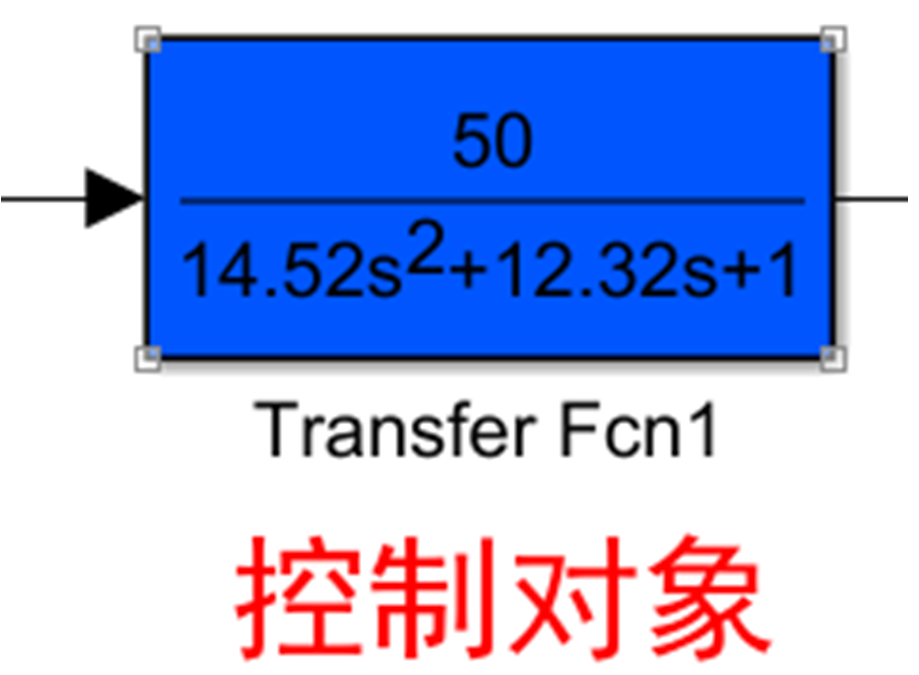
用Simulink工具建立由PID控制器组成的系统仿真模型如下图所示,其中比例增益Kp取值0.04,积分增益取值0.03,微分增益取值1.2。选用的输入是单位阶跃信号。
图4:Simulink的PID控制器仿真图
设计模糊PID控制器的主要步骤为:
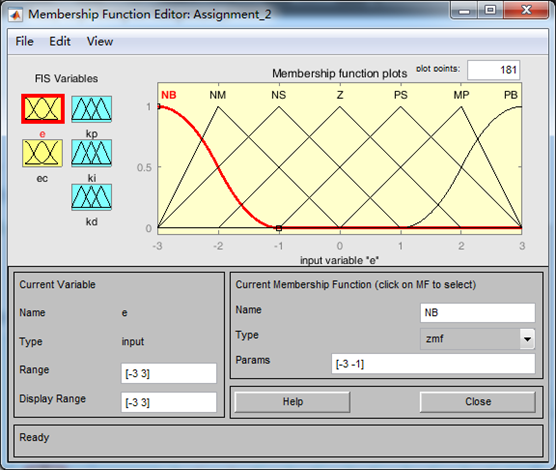
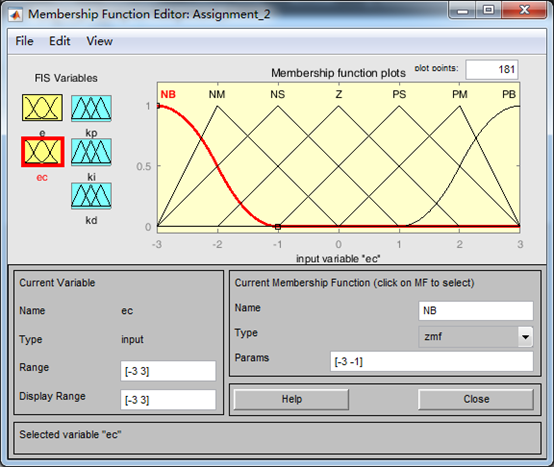
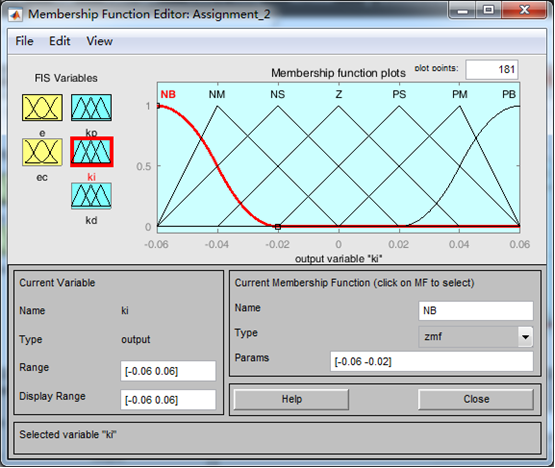
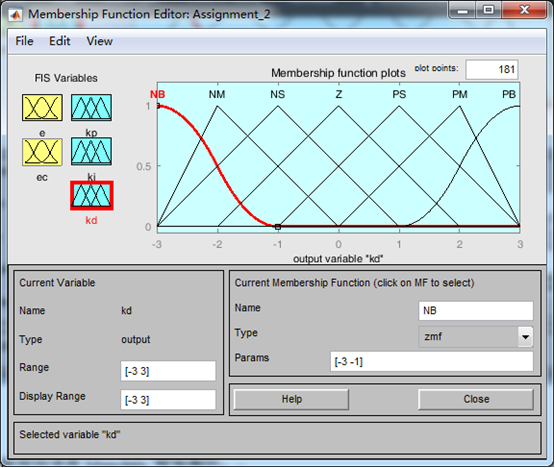
1. 选择偏差e、偏差变化ec和输出的模糊语言变量为E、EC和Kp,Ki,Kd。根据e、ec和PID参数实际的基本论域,设定E、EC都为[-3,3],Kp为[-0.3,0.3],Ki为[-0.06,0.06],Kd为[-3,3]。模糊控制器前后的GAIN模块为比例因子,可将输出输出转换到论域范围。
2. 选取E、EC和PID参数的各语言变量值:正大为PB,正中为PM,正小为PS,为零为E,负小为NS,负中为NM,负大为NB,它们各自在论域上的模糊子集隶属度函数均为三角形。
3. 选择一种模糊判决方法,将控制量由模糊量变为精确量,这个过程叫做“去模糊化”,这里采用的是“面积平分法”。
用Simulink工具建立由模糊控制器组成的系统仿真模型如下图所示:
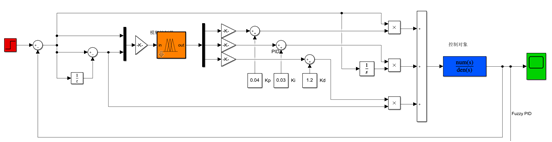
图5:Simulink的模糊PID控制器仿真图
语言值的隶属函数选择三角形的隶属度函数如下面三幅图所示:
(1)E的隶属度函数:
(2)EC的隶属度函数:
(3)PID参数(即Kp,Ki,Kd)的隶属度函数

控制规则选用Mamdain 控制规则;
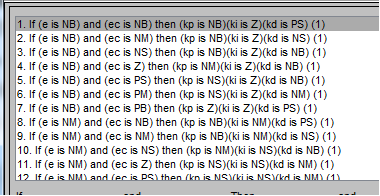
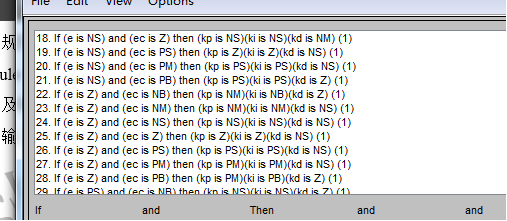
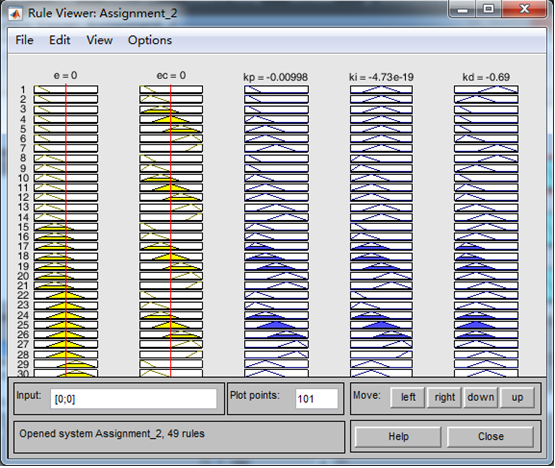
将规则输入到编辑器中(如图8所示)一共有7×7=49条规则,输入后可以在编辑器中的Rule Viewer(如图9所示)和Surface Viewe(如图10所示)r中查看对具体输入的模糊推理及输出情况,输入各种不同的数据,查看模糊推理情况及输出数据。也可以用于检查,看自己输入的规则和有没有错误。
编辑器中的Surface Viewer:
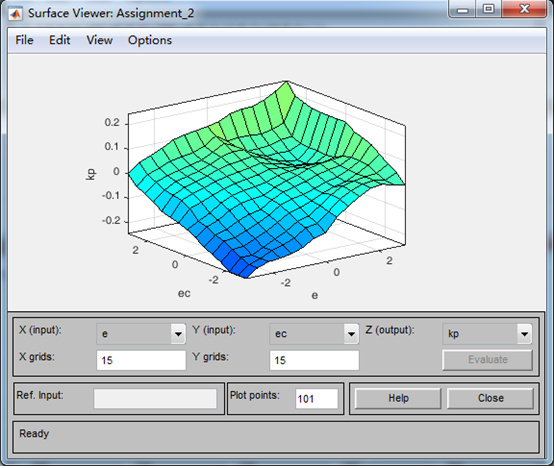
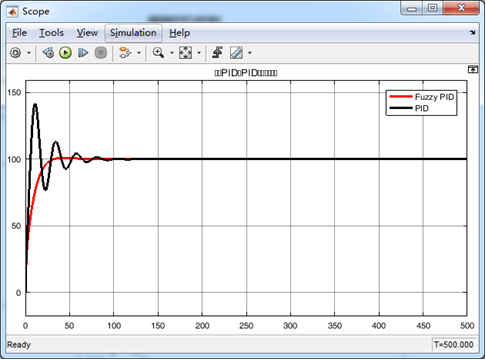
实验得到的结果图形如下所示: