2019独角兽企业重金招聘Python工程师标准>>> 
一、Elasticseach如何将数据存储到分片中
问题:当我们要在ES中存储数据的时候,数据应该存储在主分片和复制分片中的哪一个中去;当我们在ES中检索数据的时候,又是怎么判断要查询的数据是属于哪一个分片。
数据存储到分片的过程是一定规则的,并不是随机发生的。
规则:shard = hash(routing) % number_of_primary_shards
Routing值可以是一个任意的字符串,默认情况下,它的值为存数数据对应文档 _id 值,也可以是用户自定义的值。Routing这个字符串通过一个hash的函数处理,并返回一个数值,然后再除以索引中主分片的数目,所得的余数作为主分片的编号,取值一般在0到number_of_primary_shards - 1的这个范围中。通过这种方法计算出该数据是存储到哪个分片中。
正是这种路由机制,导致了主分片的个数为什么在索引建立之后不能修改。对已有索引主分片数目的修改直接会导致路由规则出现严重问题,部分数据将无法被检索。
二、主分片与复制分片如何交互
为了说明这个问题,我用一个例子来说明。
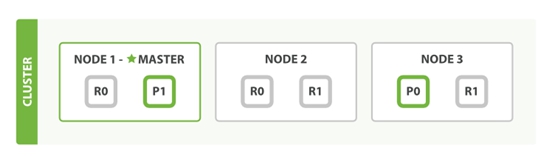
在上面这个例子中,有三个ES的node,其中每一个index中包含两个primary shard,每个primary shard拥有一个replica shard。下面从几种常见的数据操作来说明二者之间的交互情况。
1、索引与删除一个文档
这两种过程均可以分为三个过程来描述:
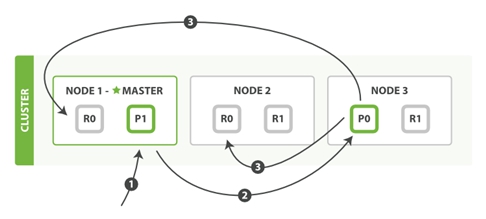
阶段1:客户端发送了一个索引或者删除的请求给node 1。
阶段2:node 1通过请求中文档的 _id 值判断出该文档应该被存储在shard 0 这个分片中,并且node 1知道shard 0的primary shard位于node 3这个节点上。因此node 1会把这个请求转发到node 3。
阶段3:node 3在shard 0 的primary shard上执行请求。如果请求执行成功,它node 3将并行地将该请求发给shard 0的其余所有replica shard上,也就是存在于node 1和node 2中的replica shard。如果所有的replica shard都成功地执行了请求,那么将会向node 3回复一个成功确认,当node 3收到了所有replica shard的确认信息后,则最后向用户返回一个Success的消息。
2、更新一个文档

该过程可以分为四个阶段来描述:
阶段1:客户端向node 1发送一个文档更新的请求。
阶段2:同样的node 1通过请求中文档的 _id 值判断出该文档应该被存储在shard 0 这个分片中,并且node 1知道shard 0的primary shard位于node 3这个节点上。因此node 1会把这个请求转发到node 3。
阶段3:node 3从文档所在的primary shard中获取到它的JSON文件,并修改其中的_source中的内容,之后再重新索引该文档到其primary shard中。
阶段4:如果node 3成功地更新了文档,node 3将会把文档新的版本并行地发给其余所有的replica shard所在node中。这些node也同样重新索引新版本的文档,执行后则向node 3确认成功,当node 3接收到所有的成功确认之后,再向客户端发送一个更新成功的信息。
3、检索文档
CRUD这些操作的过程中一般都是结合一些唯一的标记例如:_index,_type,以及routing的值,这就意味在执行操作的时候都是确切的知道文档在集群中的哪个node中,哪个shard中。
而检索过程往往需要更多的执行模式,因为我们并不清楚所要检索的文档具体位置所在, 它们可能存在于ES集群中个任何位置。因此,一般情况下,检索的执行不得不去询问index中的每一个shard。
但是,找到所有匹配检索的文档仅仅只是检索过程的一半,在向客户端返回一个结果列表之前,必须将各个shard发回的小片的检索结果,拼接成一个大的已排好序的汇总结果列表。正因为这个原因,检索的过程将分为查询阶段与获取阶段(Query Phase and Fetch Phase)。
- Query Phase
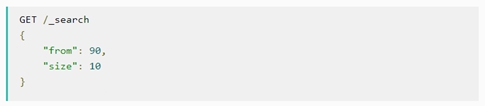
在最初的查询过程中,查询请求会广播到index中的每一个primary shard和replica shard中,每一个shard会在本地执行检索,并建立一个优先级队列(priority queue)。这个优先级队列是一个根据文档匹配度这个指标所排序列表,列表的长度由分页参数from和size两个参数所决定。例如:
下面从一个例子中说明这个过程:

Query Phase阶段可以再细分成3个小的子阶段:
子阶段1:客户端发送一个检索的请求给node 3,此时node 3会创建一个空的优先级队列并且配置好分页参数from与size。
子阶段2:node 3将检索请求发送给该index中个每一个shard(这里的每一个意思是无论它是primary还是replica,它们的组合可以构成一个完整的index数据)。每个shard在本地执行检索,并将结果添加到本地优先级队列中。
子阶段3:每个shard返回本地优先级序列中所记录的_id与sort值,并发送node 3。Node 3将这些值合并到自己的本地的优先级队列中,并做全局的排序。
- Fetch Phase
Query Phase主要定位了所要检索数据的具体位置,但是我们还必须取回它们才能完成整个检索过程。而Fetch Phase阶段的任务就是将这些定位好的数据内容取回并返回给客户端。
同样也用一个例子来说明这个过程:

Fetch Phase过程可以分为三个子过程来描述:
子阶段1:node 3获取了所有待检索数据的定位之后,发送一个mget的请求给与数据相关的shard。
子阶段2:每个收到node 3的get请求的shard将读取相关文档_source中的内容,并将它们返回给node 3。
子阶段3:当node 3获取到了所有shard返回的文档后,node 3将它们合并成一条汇总的结果,返回给客户端。
其他
这可能造成聚合结果不准确,terms aggregation默认是按照桶(bucket)内文档数量返回前十个桶,你看你的response里面有个sum_other_doc_count,这些是不在你这10个桶里面的。如果你想返回所有的桶的话,可以根据你的文档设置一个大一点的size,或者将size设为0(文档多慎用)。
例如:
{
"aggs" : {
"genres" : {
"terms" : { "field" : "genre" }
}
}
}结果:
{
"aggregations" : {
"genres" : {
"doc_count_error_upper_bound": 0,
"sum_other_doc_count": 0,
"buckets" : [
{
"key" : "jazz",
"doc_count" : 10
},
{
"key" : "rock",
"doc_count" : 10
},
{
"key" : "electronic",
"doc_count" : 10
},
]
}
}
}上面 ,对于genre 这个字段,对它里面的各个值的文档数量进行统计。
doc_count_error_upper_bound 未知
sum_other_doc_count 当有大量不同值时,ES只返回数量最多的项。这个数字表示有多少文档的统计数量没有返回。
默认情况,对于某一项的聚合,只会返回数量最高的10项,通过调整size参数,可以控制默认的行为。
我测试到,令size=0时候,会返回所有的项。
Size
size参数用来指定在列表中返回多少项。如果该项的值的个数要大于这个size ,那么返回的结果可能会不准确,有轻微的误差。甚至文档数最多的那个值没有的返回。
文档的数量是大约的量
文档的数量是不准确的,只是一个大概值。因为每个分片给出它排好的前n的部分,然后再把各个分片的结果联合成最后的结果。
官方文档给了一个非常好的例子,还有几张表格,说明造成这个情况的原因。可以自己跳过去阅读以下就明白了。这一切的原因都是因为 ES是一个分布式的存储方式。
Shard size
取得size的值越大,结果会越接近准确,当然这样导致的负载也会越高(因为更多的查询和节点之间大数据量的传输)。
默认shard_size是等于size的。如果shard_size 取更大的值,结果会更准确。
计算文档数错误
有两个错误值会显示在项的聚合上,第一个doc_count_error_upper_bound ,给出个没有被算进最后的结果的最大可能的数字。这个表明在最坏情况下,有doc_count_error_upper_bound 这么多文档个数的一个值被遗漏了。 这就是doc_count_error_upper_bound (文档数错误上界)这个参数的意义。
每个桶里的错误数
如果设置show_term_doc_count_error这个参数为ture,还会对每个 bucket都显示一个错误数,表示最大可能的误差情况。
而且,如果不是按照排序的话,这个错误是算不出来的,这时候,会给一个-1来表示这种有错,但是不知道错误边界的情况。
Order
用order参数可以做排序,默认是按照doc_count倒序排列的。
可以改变默认情况
“order” : { “_count” : “asc” } 这是按照doc_count升序排列
“order” : { “_term” : “asc” } 这是按照字母表升序排列。