1.CAN是控制器局域网络(Controller Area Network, CAN)的简称
(理论知识不做讲解了,太多了)
2.芯片选用:TJA1050

差分信号输入,
这里的显性电平CANH和CANL压差是2V左右,逻辑上表示“0”
两线之间没有压差CANH和CANL都是2.5V左右,表示逻辑“1”
(二)实现代码
1.
/* 配置CAN模块*/
CAN_Config();
void CAN_Config(void)
{
①CAN_GPIO_Config(); //此处用PB8/PB9
CAN_NVIC_Config();
CAN_Mode_Config();
CAN_Filter_Config();
}
②对于CAN_NVIC_Config();
看下CAN 的中断分类

static void CAN_NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure one bit for preemption priority */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
/*中断设置*/
NVIC_InitStructure.NVIC_IRQChannel = USB_LP_CAN1_RX0_IRQn; //CAN1 RX0中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //子优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
③CAN_Mode_Config(); //CAN不像I2C那样有片选,他背身有许多协议,也要进行选择,所以对应代码的结构体也多(集体可看CAN手册)
④CAN_Filter_Config(); 过滤器程序
看下CAN的主要框图(M3里面的CAN)
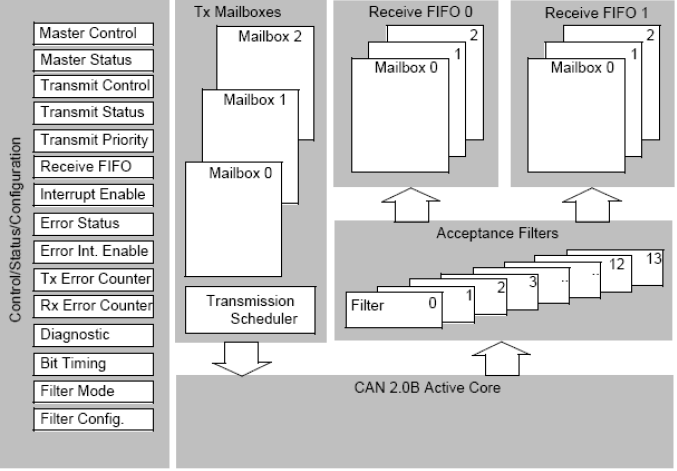
M3里面有三个发送邮箱,把要发送的数据打包成报文,然后把它发送到CAN网络总线上;
接收器 先经过滤器,M3里面有14个过滤器,过滤的时候是根据报文的ID来过滤的,ID相同的话,才能过去(相当于一个闸门)
接收到数据后(这里有两个FIFO ,0、1 ),我们的实验用的是 放到FIFO 的Mailbox 0;
代码写法根基三部分:
1.Tx Mailboxes 2.Acceptance Filters 3.Receive FIFO
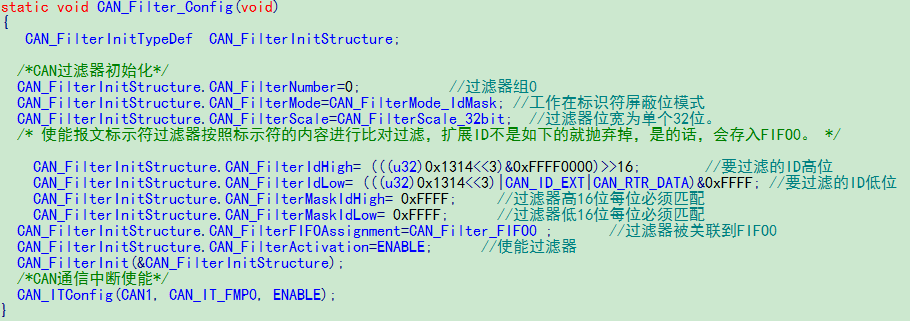
STM32 的 ID 过滤方式有两种,一种为标识符列表模式,它把要接收报文
的 ID 列成一个表,要求报文 ID 与列表中的某一个标识符完全相同才可以接
收,可以理解为白名单管理。(说白了就是有一个标志位相同,然后就联通了)
另一种称为标识符屏蔽模式,它把可接收报文 ID 的某几位作为列表,这几
位被称为屏蔽位,可以把它理解成关键字搜索,只要屏蔽位(关键字)相同,就
符合要求。即这种模式只要求报文 ID 的屏蔽位与列表中标识符相应屏蔽位相
同 ,报文就被保存到接收 FIFO。(标志位的某几位检验,相同的话就通过了)
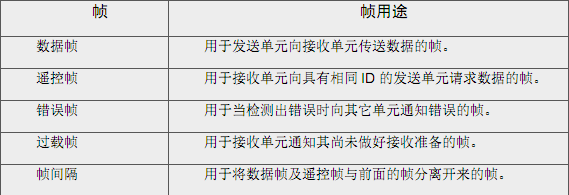
2.什么叫做报文(就是帧)
在原始数据段的前面加上传输起始标签、片选(识别)标签、控制标签,在
数据的尾段加上 CRC 校验标签、应答标签和传输结束标签。把这些内容按特定
的格式打包好,就可以用一个通道表达各种信号了,各种各样的标签就如同
SPI 中各种通道上的信号,起到了协同传输的作用。当整个数据包被传输到其
它设备时,只要这些设备按格式去解读,就能还原出原始数据。类似这样的数
据包就被称为 CAN的数据帧。
看下数据帧
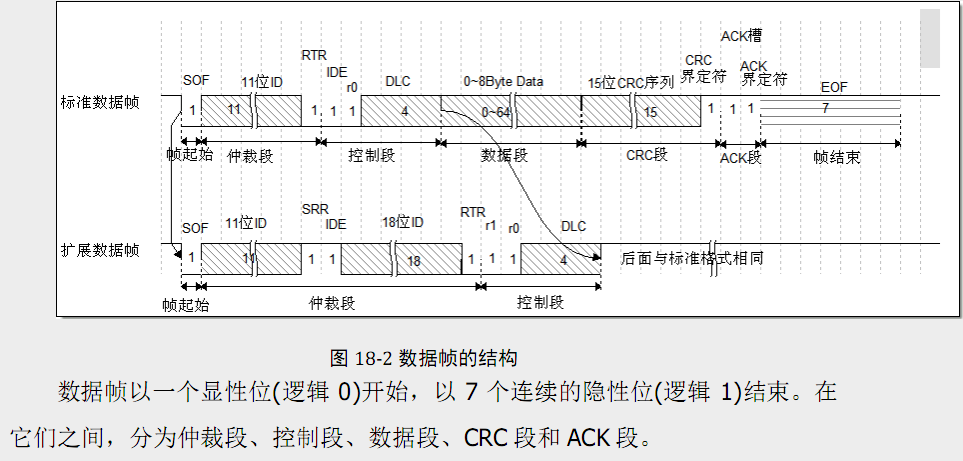
扩展与标准 仲裁段不一样,扩展11+18 = 29位
仲裁段:告诉是发还是收(几个同时通信的时候,那那根的信号,拉低了就是谁的了)如:
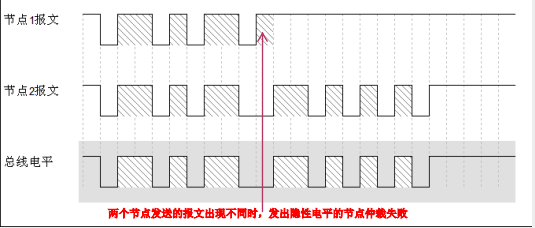
总电平接收了节点2的^_^(can的神奇之处)
CRC:发送与接收的对应
IDE:用于区分标准帧与扩展帧
r0、r1 都是显性位
3.CAN通信报文内容设置
void CAN_SetMsg(void)
4.发送消息,“ABCD”
CAN_Transmit(CAN1, &TxMessage);
总体流程图(例程对应):

while( flag == 0xff ); //flag =0 ,success ,此时产生一个中断(CAN中断)
对于从机的CAN_Config(); 是一模一样
不一样的是从机先上电
中断函数时一样的
CAN线接的时候 CANH接CANH, CANL接CANL, 不能对接