Camera-MTK OpenCamera时序以及耗时
OpenCamera时序分析
1.应用层
08:53:56.087 应用层调用openCamera接口

2.CameraService层
08:53:56.099 10ms左右CameraService(进程号:742 线程号:25763)进行相关打印,从应用层到CameraServer之间经过FrameWork层(同一进程)以及ICameraService与CameraService之间的跨进程AIDL通信。此时CameraManagera(进程号:29471 线程号:29508)的相关部分处于阻塞状态,等待CameraService处理完成。
![]()
3.CameraProvider(Camera HAL Interface-CameraProviderImpl SP端)
08:53:56.116 17ms左右CameraProvider的device部分进行相关的log打印,从CameraService(CameraProviderManager)到CameraProvider(ICameraProviderImpl)之间有着跨进程的HIDL通信,此时CameraProviderManager(进程号:742 线程号:25763)处于阻塞状态,等待ICameraProviderImpl相关处理完成。


4.Camera HAL Interface层
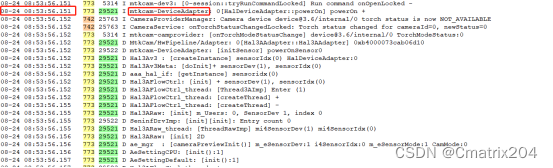
08:53:56.151 耗时35ms Camera HAL Interface(很多人把这个层级称为CameraProvider层,可能因为它跟CameraServer是通过ICameraProviderImpl进行交互的)(进程号:773 线程号:5314)完成相关操作,之前被阻塞的CameraServer的CameraProviderManager拿到相应的信息,开始执行,但是此时并没有openCamera,才刚刚powerOn拉高camera。
而且Camera HAL Interface相关的时序以及逻辑是在手机启动之后就已经起来的,与相机有没有打开没有关系,且里面会分成Provider、Commmon、Device、Session等好多模块对相机的open、preview、capture动作进行传递。

5.Camera HAL层
08:53:56.151 开始执行Camera HAL层(进程号:773 线程号:29521)相关的时序及逻辑
08:53:56.220 直到应用层/FrameWork层CameraManagera、ICameraService相关的进程结束阻塞,Camera HAL里面还有很多在执行。

6.Log时序总结
openCamera是从08:53:56.087-08:53:56.220结束
CameraProviderManager - ICameraProviderImpl HIDL跨进程通信耗时35ms
ICameraService - CameraService AIDL跨进程通信中主要的阻塞、等待或者消费方式以及接口需要更进一步研究与明确耗费时间。
OpenCamera调用接口分析
1.应用层
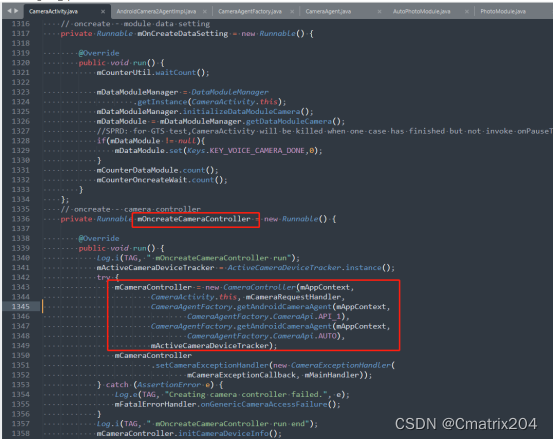
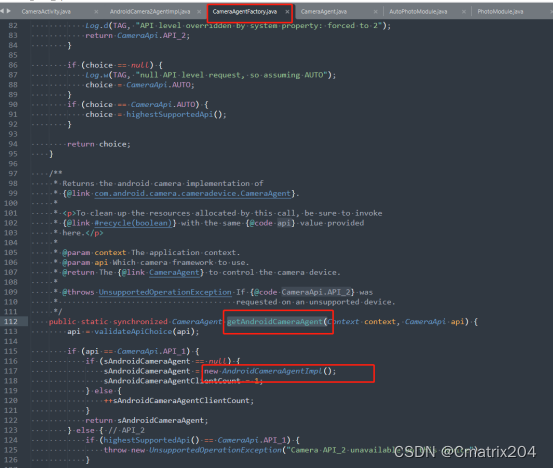


2.Camera FrameWork
可以在这边打Log,相关进程会hang在这边connectDevice的调用下

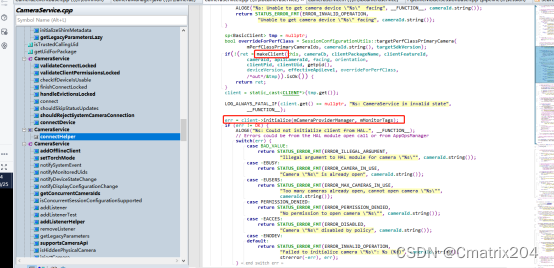
3.CameraService

CameraSevice里面与openCamera相关的重要节点都在connectHelper里面了,比如:

handleEvictionsLocked:这里面会处理所有的camera id冲突场景,且会给不同调用camera id的packages进行打分操作。

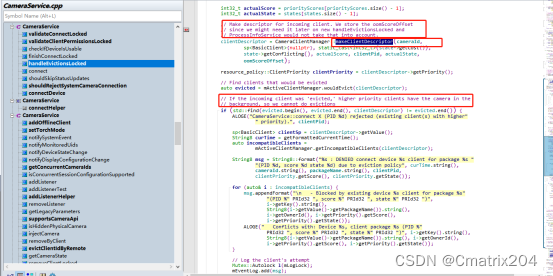
下面的ClientDescriptor相关的还没搞懂。

makeClient:Binder的Bn端,会初始化CameraDeviceClient、Camera2ClientBase、CameraDeviceClientBase以及调用其initialize方法。


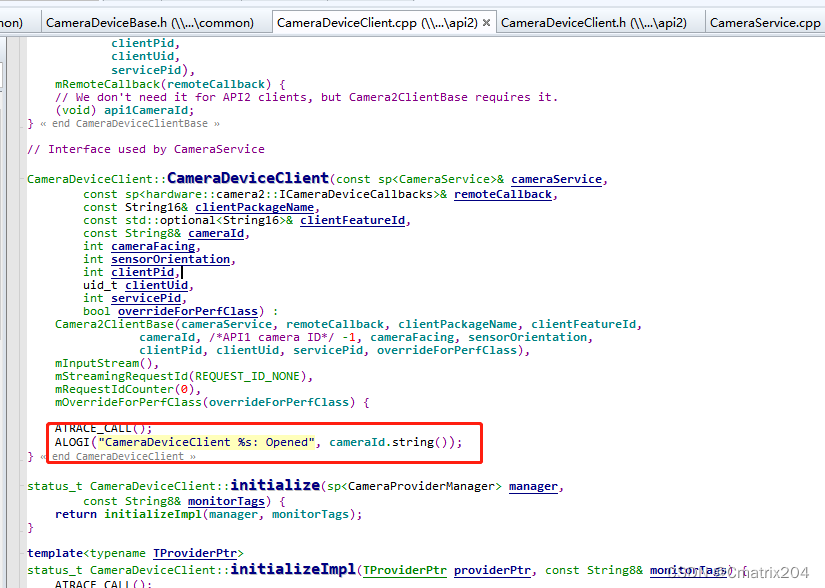
这边InitializeImpl主要最主要的是run了FrameProcess这个线程,这个线程就在后面的过程中用来接收预览帧数据。
这边关键节点是startCameraOps、然后又调用了CameraDeviceBase的initialize方法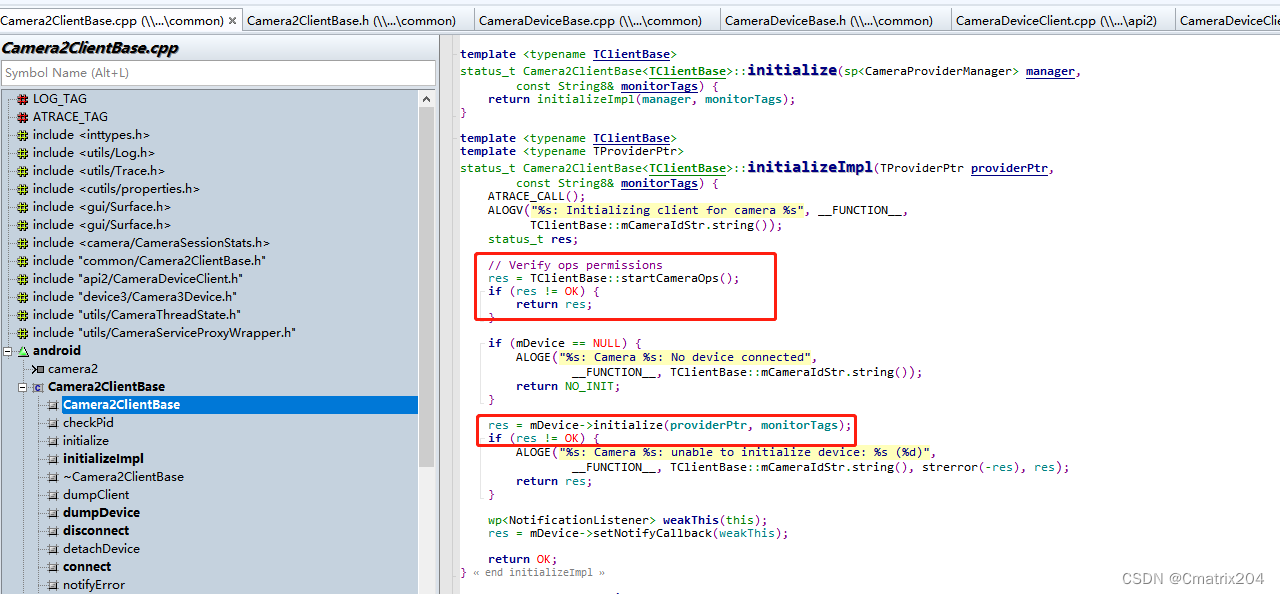
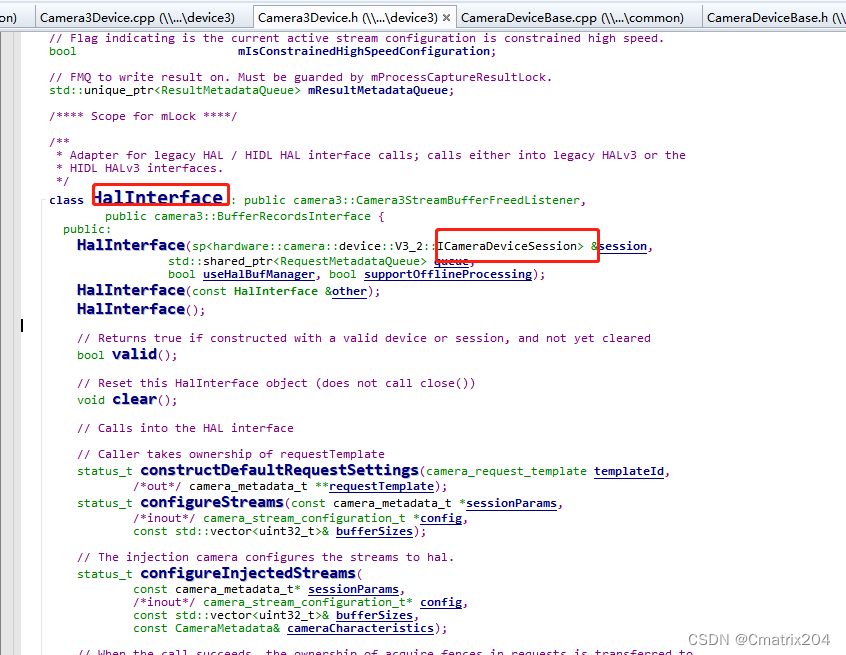
可以看到这边定义了很多纯虚函数,需要找到其具体的实现接口
相关方法的接口具体实现都在Camera3Device里面


CameraProviderManager里面的deviceInfo3在刚开机时候CameraServer与CameraProvider之间的交互过程中已经获取了。
4.Camera HardWare Interface(CameraProvider)
这边其实和展锐平台相关的HardWare Interface相关节点都是一样的
主要就是几个关键的结构体的传递,建立了Camera HardWare Interface和Camera HAL之间的联系。
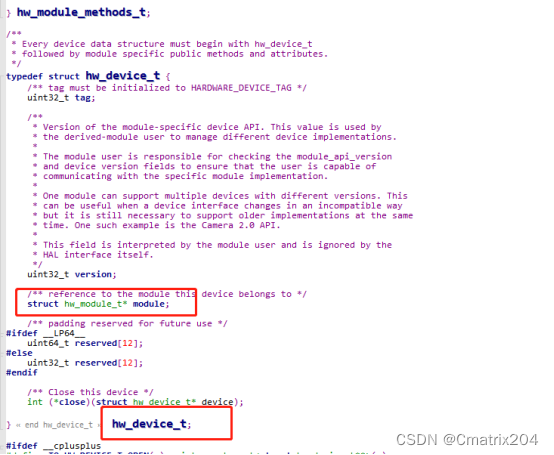
1.hw_device_t里面有hw_module_t,可以通过hw_module_t去调用open方法。
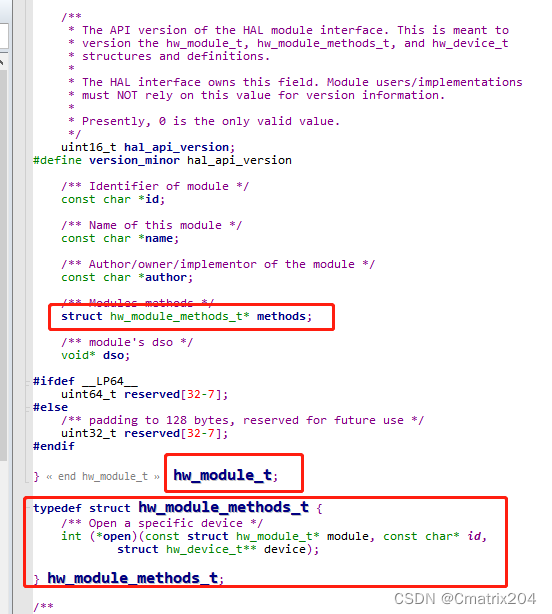
2.hw_module_t这边在里面封装了hw_module_methods_t的函数指针,指向了open的实例化函数接口。
3.camera3_device_t在MTK camera HAL架构中貌似没有用到,在展讯的平台架构中使用场景还是挺多的。

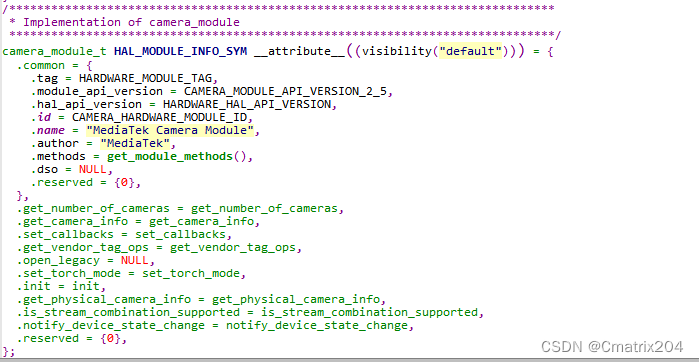
4.camera_module_t 这个结构体算是链接Camera HardWare Interface和Camera HAL层最为紧密的纽带了。


5.Camera HAL
MTK HAL层有三个entry接口,具体咋么实现什么情况对应哪个需要再去研究。

vendor/mediatek/proprietary/hardware/mtkcam3/main/mtkhal/hidl/depend/entry.cpp
可以看到对Camera HardWare Interface里面camera_module_t的所有接口说明都在这边进行了实例化。接下来对一些比较重要的接口进行详细说明和解释
extern "C" NSCam::legacy_dev3::LegacyCameraModule* getLegacyCameraModule() {
static NSCam::CameraDeviceManagerImpl singleton("legacy");
static bool init = singleton.initialize();
if (!init) {
MY_LOGE("CameraDeviceManagerImpl::initialize fail %p", &singleton);
return nullptr;
}
static NSCam::legacy_dev3::LegacyCameraModule* module =
createLegacyCameraModule(&singleton);
if (module == nullptr) {
MY_LOGE("LegacyCameraModule is null: %p", module);
return nullptr;
}
return module;
}
// Implementation of hw_module_methods_t
static int open_device(hw_module_t const* module,
const char* name,
hw_device_t** device) {
// return getLegacyCameraModule()->open(device, module, name);
#warning "set device_version to 0 to avoid build error"
// device_version = 0 would query info every time
return getLegacyCameraModule()->open(device, module, name, 0);
}
static hw_module_methods_t* get_module_methods() {
static hw_module_methods_t _methods = {.open = open_device};
return &_methods;
}vendor/mediatek/proprietary/hardware /mtkcam3/main/mtkhal/devicemgr/depend/CameraDeviceManagerImpl.cpp
class CameraDeviceManagerImpl : public CameraDeviceManagerBase {
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// Implementations.
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
public: Instantiation.
explicit CameraDeviceManagerImpl(char const* type);
virtual ~CameraDeviceManagerImpl();
protected: Operations.
virtual auto onEnumerateDevicesLocked() -> ::android::status_t;
virtual auto onGetMaxNumOfMultiOpenCameras() const -> uint32_t;
virtual auto onValidateOpenLocked(
const std::shared_ptr<IVirtualDevice>& pVirtualDevice) const
-> ::android::status_t;
virtual auto onAttachOpenDeviceLocked(
const std::shared_ptr<IVirtualDevice>& pVirtualDevice) -> void;
virtual auto onDetachOpenDeviceLocked(
const std::shared_ptr<IVirtualDevice>& pVirtualDevice) -> void;
virtual auto onEnableTorchLocked(const std::string& deviceName, bool enable)
-> ::android::status_t;
};vendor/mediatek/proprietary/hardware/mtkcam3/main/mtkhal/devicemgr/base/CameraDeviceManagerBase.cpp

vendor/mediatek/proprietary/hardware/mtkcam3/include/mtkcam3/main/mtkhal/devicemgr/ICameraDeviceManager.h
class ICameraDeviceManager {
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// Definitions.
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
public:
class IVirtualDevice : virtual public ::android::RefBase {
public:
/**
* The device instance names must be of the form
* "device@<major>.<minor>/<type>/<id>" where
* <major>/<minor> is the HIDL version of the interface.
* <id> is a small incrementing integer for "internal" device types,
* with 0 being the main back-facing camera and 1 being the main
* front-facing camera, if they exist.
*/
struct Info {
std::string mInstanceName; // instance device:
// "device@<major>.<minor>/<type>/<id>"
int32_t mInstanceId; // instance id
int32_t mVirtualInstanceId; // virtual instance id
uint32_t mMajorVersion; // major version
uint32_t mMinorVersion; // minor version
bool mHasFlashUnit; // has flash unit
bool mIsHidden; // Is camera hidden
int32_t mFacing; // facing
// mcam::DeviceType mType; // NormalDevice/PostProcDevice/...
};
public:
virtual auto getDeviceInterface(std::shared_ptr<IVirtualDevice>& rpDevice)
const -> ::android::status_t = 0;
virtual auto getDeviceInfo() const -> Info const& = 0;
virtual auto getInstanceName() const -> char const* {
return getDeviceInfo().mInstanceName.c_str();
}
...
}vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/device/3.x/device/CameraDevice3Impl.h
ICameraDeviceManager.h里面并没有相关接口的实例化,真正的接口实例化是在CameraDevice3Impl.cpp里面实现的。
class CameraDevice3Impl
: public ICameraDeviceManager::IVirtualDevice
{
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// Definitions.
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// public:
// struct MyDebuggee : public IDebuggee
// {
// static const std::string mName;
// std::shared_ptr<IDebuggeeCookie>mCookie = nullptr;
// android::wp<CameraDevice3Impl> mContext = nullptr;
// MyDebuggee(CameraDevice3Impl* p) : mContext(p) {}
// virtual auto debuggeeName() const -> std::string { return mName; }
// virtual auto debug(
// android::Printer& printer,
// const std::vector<std::string>& options
// ) -> void;
// };
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// Data Members.
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
protected:
// setup during constructor
int32_t mLogLevel = 0; // log level.
ICameraDeviceManager* mDeviceManager = nullptr; // device manager.
std::shared_ptr<Info> mStaticDeviceInfo = nullptr; // device info
// std::shared_ptr<MyDebuggee> mDebuggee = nullptr;
::android::sp<IMetadataProvider> mMetadataProvider = nullptr;
::android::sp<IMetadataConverter> mMetadataConverter = nullptr;
::android::sp<ICameraDevice3Session> mSession = nullptr;
std::map<uint32_t, ::android::sp<IMetadataProvider>> mPhysicalMetadataProviders;
mutable ::android::Mutex mGetResourceLock;
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// Operations.
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
public: Instantiation.
virtual ~CameraDevice3Impl();
CameraDevice3Impl(
ICameraDeviceManager* deviceManager,
IMetadataProvider* metadataProvider,
std::map<uint32_t, ::android::sp<IMetadataProvider>>const& physicalMetadataProviders,
char const* deviceType,
int32_t instanceId,
int32_t virtualInstanceId);
virtual auto initialize(
ICameraDevice3Session* session
) -> bool;
public: Operations.
auto getLogLevel() const { return mLogLevel; }
auto const& getStaticDeviceInfo() const { return mStaticDeviceInfo; }
auto const& getMetadataConverter() const { return mMetadataConverter; }
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// Interfaces.
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
public: ICameraDeviceManager::IVirtualDevice Interfaces.
virtual auto getDeviceInterface(
::android::sp<CameraDevice3Impl>& rpDevice
) const -> ::android::status_t override;
virtual auto getDeviceInfo() const -> Info const& override;
public: ICameraDevice Interfaces implement.
virtual auto getResourceCost(v3::CameraResourceCost& mtkCost) -> int;
virtual auto setTorchMode(v3::TorchMode mode) -> ::android::status_t;
virtual auto open() -> ::android::sp<ICameraDevice3Session>;
virtual auto dumpState(android::Printer& printer, const std::vector<std::string>& options) -> void;
virtual auto getCameraCharacteristics() -> const camera_metadata_t*;
virtual auto getPhysicalCameraCharacteristics(
int physicalId,
camera_metadata* physicalMetadata) -> int;
virtual auto isStreamCombinationSupported(
const v3::StreamConfiguration& streams,
bool& isSupported) -> int;
public: Operations
virtual auto getDeviceSession() -> const ::android::sp<ICameraDevice3Session>;
};
到这边HAL openCamera相关的动作只算走了一半,仅仅是entry.cpp里面实例化CameraDeviceManagerImpl实例化的过程。
这边已经开始对sensor进行了相关的init操作

真正的camera device open操作会在LegacyCameraModule里面,上面的CameraDevice3Impl也有相关的open操作,主要是CameraDeviceSession的调用。

 vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/entry/legacy/device/LegacyCameraDevice3.cpp
vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/entry/legacy/device/LegacyCameraDevice3.cpp

vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/device/3.x/device/CameraDevice3Impl.cpp
相关的mSession的实例化的操作在initialize这边,调用的是CameraDevice3Session的open操作


接下来要追踪的便是CameraDeviceImpl.initial里面的session是谁传过来的,是哪边创建的、创建的什么tag。
vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/device/3.x/device/CameraDevice3Factory.cpp
extern "C"
NSCam::ICameraDeviceManager::IVirtualDevice*
createVirtualCameraDevice(CreateVirtualCameraDeviceParams* params)
{
MY_LOGD("[hidldc] new createVirtualCameraDevice");
if ( ! params || ! params->pDeviceManager || ! params->pMetadataProvider ) {
MY_LOGE("Bad params");
return nullptr;
}
auto pDevice = new CameraDevice3Impl(
params->pDeviceManager,
params->pMetadataProvider,
params->physicalMetadataProviders,
params->deviceType,
params->instanceId,
params->virtualInstanceId
);
if ( ! pDevice ) {
MY_LOGE("Fail to new CameraDevice3Impl");
return nullptr;
}
NSCam::ICameraDevice3Session::CreationInfo const info = {
.mDeviceManager = params->pDeviceManager,
.mStaticDeviceInfo = pDevice->getStaticDeviceInfo(),
.mMetadataProvider = params->pMetadataProvider,
.mMetadataConverter = pDevice->getMetadataConverter(),
.mPhysicalMetadataProviders = params->physicalMetadataProviders
};
bool bInitSuccess = pDevice->initialize(createCameraDevice3Session(info));
if ( ! bInitSuccess ) {
delete pDevice;
pDevice = nullptr;
}
return pDevice;
}createCameraDevice3Session的接口的实现是在CameraDevice3SessionFactory.cpp里面实现的
extern "C"
NSCam::ICameraDevice3Session*
createCameraDevice3Session(
NSCam::ICameraDevice3Session::CreationInfo const& info
)
{
// Based on the information of instanceId + pMetadataProvider,
// decide which device session to create.
return new NSCam::v3::CameraDevice3SessionImpl(info);
}然后的主要实现就在CameraDevice3SessionImpl
vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/device/3.x/device/CameraDevice3SessionImpl.cpp
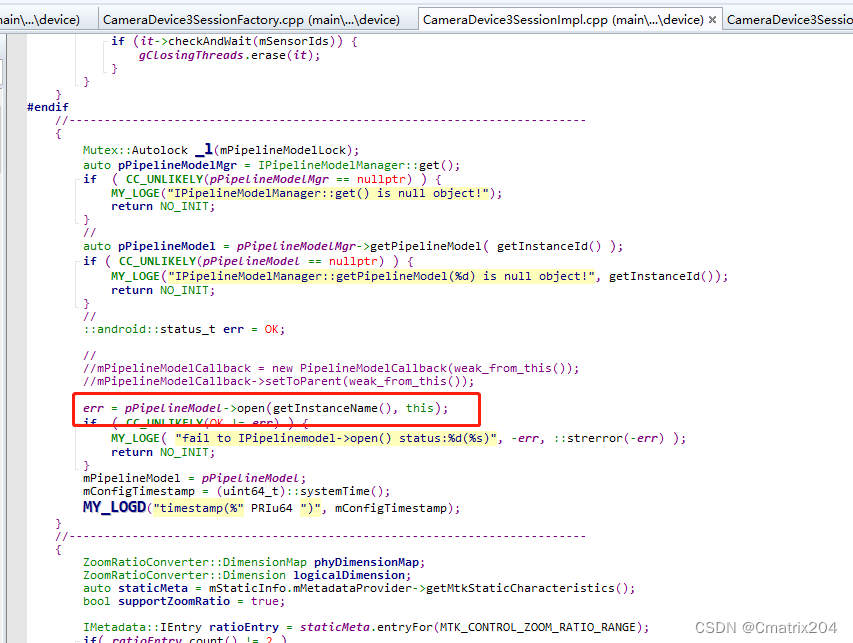
这边不在做仔细的剖析了,里面涉及很多接口的调用,直接贴上最关键的节点PipelineMode->open,这样就与MTK 的pipeline mode进行了对接。
其实在实际解决问题时候,很多人不会去check Camera HAL的前期框架,关注点更会放在MTK Pipeline的框架上,整个流程及框架肯定是越通透对以后的性能、时序分析更加有帮助,能多研究点就多看点呗。
总结
MTK Camera HAL性能到这边远没有结束,总的MTK Camera HAL层openCamera架构可以简单的以线程号分成三个大的部分,现在仅仅是对PipelineMode之前的部分进行了流程调用分析,其中的耗时以及等待机制还需要打更多的log去追,以后的优化更不是简简单单能搞定的。