【Games101 作业6 + 附加题】渲染兔子 BVH SAH 代码
基础题部分
根据教程PDF,首先需要引用如下函数(在作业5的基础上稍作修改):

renderer() in Renderer.cpp
解说见注释:
// The main render function. This where we iterate over all pixels in the image,
// generate primary rays and cast these rays into the scene. The content of the
// framebuffer is saved to a file.
void Renderer::Render(const Scene& scene)
{
std::vector<Vector3f> framebuffer(scene.width * scene.height);
float scale = tan(deg2rad(scene.fov * 0.5));
float imageAspectRatio = scene.width / (float)scene.height;
Vector3f eye_pos(-1, 5, 10);
int m = 0;
for (uint32_t j = 0; j < scene.height; ++j) {
for (uint32_t i = 0; i < scene.width; ++i) {
// generate primary ray direction
// TODO: Find the x and y positions of the current pixel to get the
// direction
// vector that passes through it.
// Also, don't forget to multiply both of them with the variable
// *scale*, and x (horizontal) variable with the *imageAspectRatio*
float x = (2 * (i + 0.5) / (float)scene.width - 1) * imageAspectRatio * scale;
float y = (1 - 2 * (j + 0.5) / (float)scene.height) * scale;
// 从这里开始
Vector3f dir = normalize(Vector3f(x, y, -1)); // Don't forget to normalize this direction!
// 在本次代码框架中,castRay()函数放在了Scene类中
// 并且castRay()的传入参数修改为(const Ray &ray, int depth)
// 所以要先声明Ray ray(const Vector3f& ori, const Vector3f& dir)
Ray ray(eye_pos, dir);
// 调用scene.castRay()
// 并将返回结果(Vector3f类型的像素RGB颜色)存入framebuffer中
framebuffer[m++] = scene.castRay(ray, 0);
}
UpdateProgress(j / (float)scene.height);
}
UpdateProgress(1.f);
// save framebuffer to file
FILE* fp = fopen("binary.ppm", "wb");
(void)fprintf(fp, "P6\n%d %d\n255\n", scene.width, scene.height);
for (auto i = 0; i < scene.height * scene.width; ++i) {
static unsigned char color[3];
color[0] = (unsigned char)(255 * clamp(0, 1, framebuffer[i].x));
color[1] = (unsigned char)(255 * clamp(0, 1, framebuffer[i].y));
color[2] = (unsigned char)(255 * clamp(0, 1, framebuffer[i].z));
fwrite(color, 1, 3, fp);
}
fclose(fp);
}Triangle::getIntersection in Triangle.hpp
解说见注释:
// TODO find ray triangle intersection
inline Intersection Triangle::getIntersection(Ray ray)
{
Intersection inter;
if (dotProduct(ray.direction, normal) > 0)
return inter;
// u,v为三角形重心坐标,即PPT中的b1,b2
// t_tmp是PPT中的t
double u, v, t_tmp = 0;
Vector3f pvec = crossProduct(ray.direction, e2);
double det = dotProduct(e1, pvec);
if (fabs(det) < EPSILON)
return inter;
double det_inv = 1. / det;
Vector3f tvec = ray.origin - v0;
u = dotProduct(tvec, pvec) * det_inv;
if (u < 0 || u > 1)
return inter;
Vector3f qvec = crossProduct(tvec, e1);
v = dotProduct(ray.direction, qvec) * det_inv;
if (v < 0 || u + v > 1)
return inter;
t_tmp = dotProduct(e2, qvec) * det_inv;
// 如果有intersection,则赋值给Intersection inter并将inter返回
// Intersection的定义:见Intersection.hpp
inter.happened = true; // 光线和该三角形有交叉点
inter.coords = ray(t_tmp); // 利用公式o+td,求得intersection(交点)坐标
inter.normal = normal; // 传入该三角形的法线
inter.distance = t_tmp; // 与光源点的距离,用t表示即可
inter.obj = this; // 指针指向自身
inter.m = m; // 传入该三角形材质(material)
return inter;
}然后实现BVH的功能:
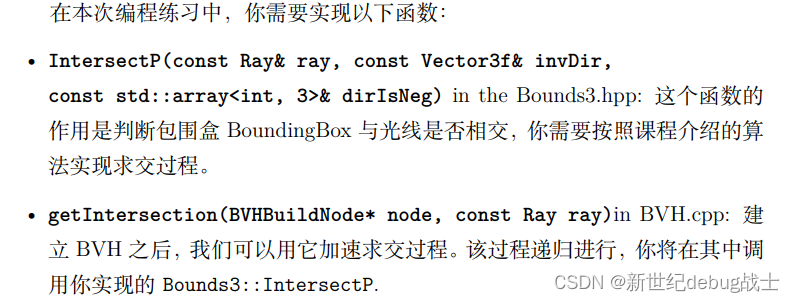
IntersectP() in the Bounds3.hpp
这里使用PPT中的公式:
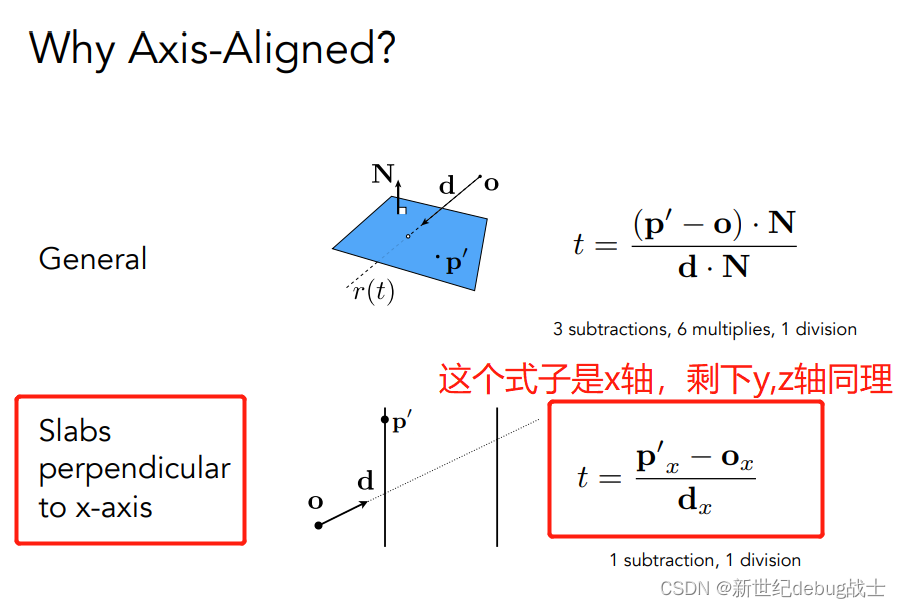

如果光线方向是相反的(即xyz轴相应的方向向量为负数),则要交换tmin和tmax,这里闫老师的PPT没讲,需要特别注意!
代码和详解如下:
// TODO test if ray bound intersects
inline bool Bounds3::IntersectP(const Ray& ray, const Vector3f& invDir,
const std::array<int, 3>& dirIsNeg) const
{
// invDir: ray direction(x,y,z), invDir=(1.0/x,1.0/y,1.0/z), use this because Multiply is faster that Division
// invDir就是1/Dir,因为乘法的运算比除法快,故使用invDir来加快运算速度
// dirIsNeg: ray direction(x,y,z), dirIsNeg=[int(x<0),int(y<0),int(z<0)], use this to simplify your logic
// 上面这一句注释在源代码中写错了,应该是[int(x<0),int(y<0),int(z<0)]
float tmin_x = (pMin.x - ray.origin.x) * invDir.x;
float tmin_y = (pMin.y - ray.origin.y) * invDir.y;
float tmin_z = (pMin.z - ray.origin.z) * invDir.z;
float tmax_x = (pMax.x - ray.origin.x) * invDir.x;
float tmax_y = (pMax.y - ray.origin.y) * invDir.y;
float tmax_z = (pMax.z - ray.origin.z) * invDir.z;
// swap t_min and t_max if direction is negative
// 如果[int(x<0),int(y<0),int(z<0)],需要交换tmin和tmax
// 这里PPT上面没有讲,需要特别注意
if (dirIsNeg[0]) std::swap(tmin_x, tmax_x);
if (dirIsNeg[1]) std::swap(tmin_y, tmax_y);
if (dirIsNeg[2]) std::swap(tmin_z, tmax_z);
float t_enter = std::max(tmin_x, std::max(tmin_y, tmin_z));
float t_exit = std::min(tmax_x, std::min(tmax_y, tmax_z));
if (t_enter < t_exit && t_exit >= 0) return true;
else return false;
}getIntersection()in BVH.cpp
这里参考PPT中的伪代码即可轻松完成:
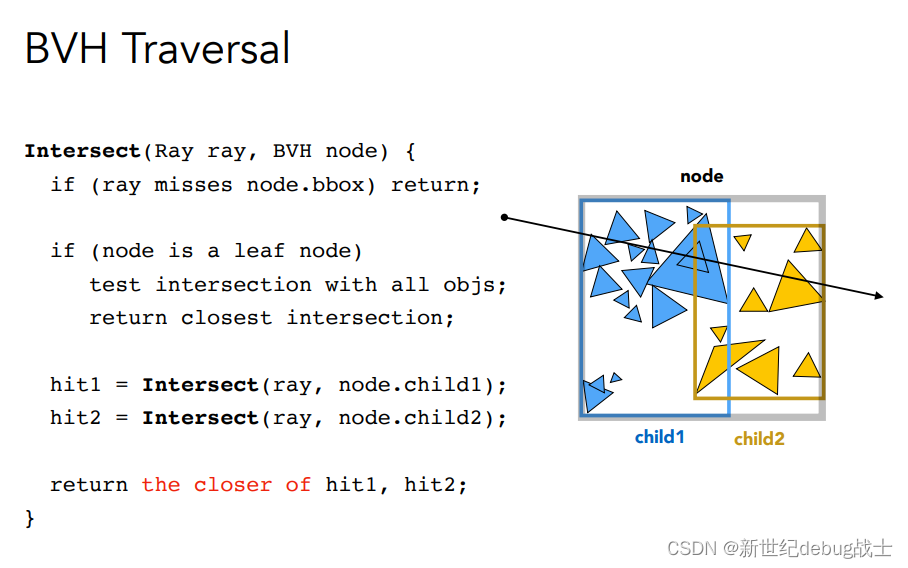
代码如下:
Intersection BVHAccel::getIntersection(BVHBuildNode* node, const Ray& ray) const
{
// TODO Traverse the BVH to find intersection
std::array<int, 3> dirIsNeg = {int(ray.direction.x<0), int(ray.direction.y<0), int(ray.direction.z<0)};
bool flag_insert = node->bounds.IntersectP(ray, ray.direction_inv, dirIsNeg);
Intersection intersection; // default: happened = false
// if (ray misses node.bbox) return;
if (!flag_insert) return intersection;
// if (node is a leaf node)
if (node->left == nullptr && node->right == nullptr)
{
// test intersection with all objs;
// return closest intersection;
return node->object->getIntersection(ray);
}
// hit1 = Intersect(ray, node.child1);
Intersection hit1 = getIntersection(node->left, ray);
// hit2 = Intersect(ray, node.child2);
Intersection hit2 = getIntersection(node->right, ray);
// return the closer of hit1, hit2
return (hit1.distance < hit2.distance ? hit1 : hit2);
}渲染结果如下:
BVH用时:4秒钟
附加题部分:SAH加速的实现
这里主要参考了如下资料:
闫老师给的CMU PPT链接(完整PPT可供下载)
中文讲解:BVH with SAH (Bounding Volume Hierarchy with Surface Area Heuristic) - lookof - 博客园
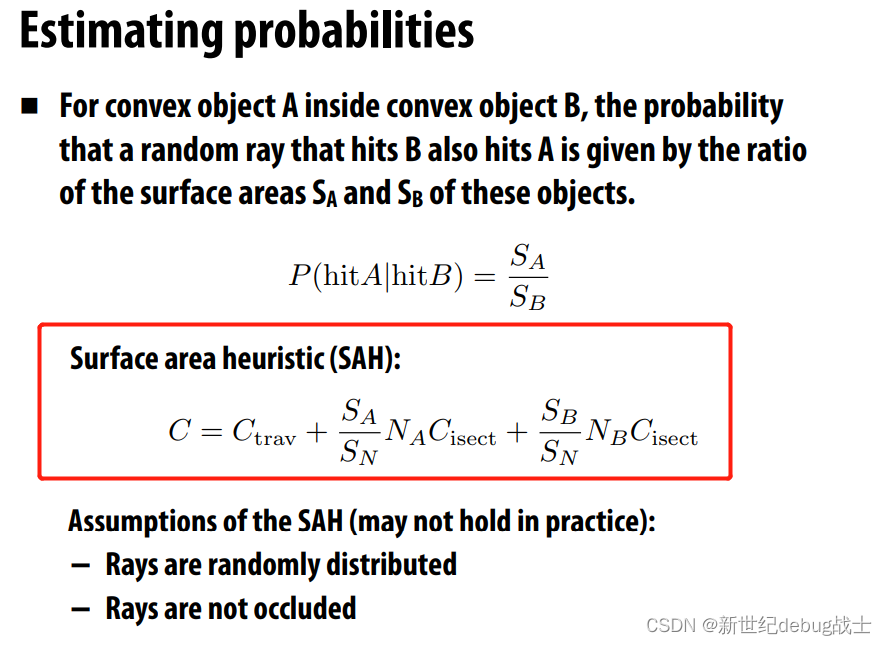
这里主要讲几个重点,其中,成本cost的计算方式为:
伪代码:
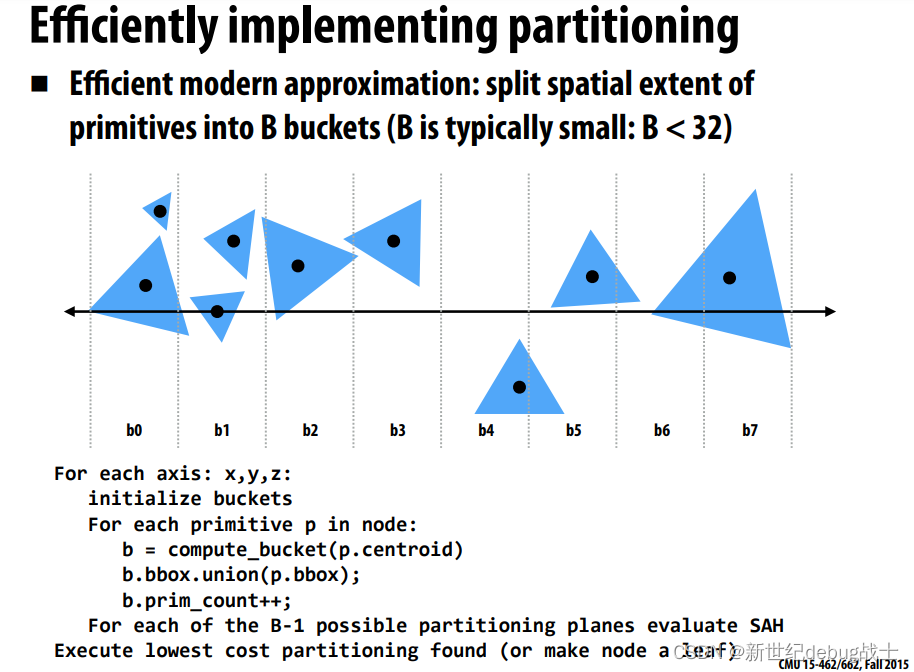
中文讲解为:
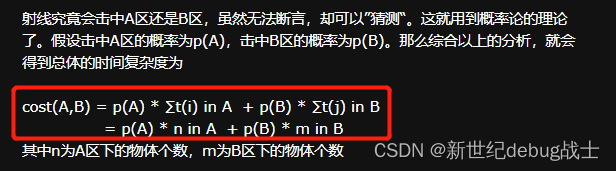
将以上步骤简化:
cost(A,B) = p(A)*(n in A) + p(B)*(m in B)
其中:
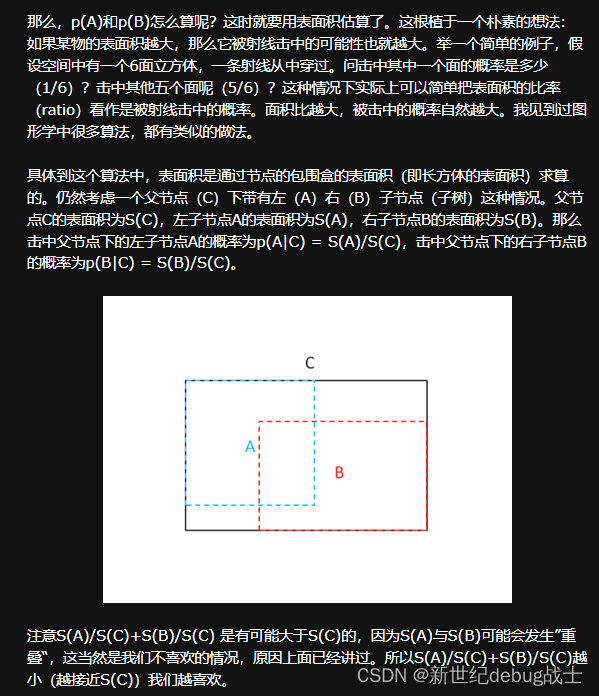
p(A) = s(A) / s(C)
p(A) = s(B) / s(C)
因为分母同为s(C),所以我们对比的时候无需对比分母,故cost(A,B)可以简化为:
cost(A,B) = s(A)*(n in A) + s(B)*(m in B)
分别在xyz轴中寻找上式的最小值即可。
代码实现:
首先,往BVH类的声明(BVH.hpp)中加入以下函数:
BVHBuildNode* BVHAccel::recursiveSAHBuild(std::vector<Object*> objects);然后,在BVH.cpp中:
1)声明一个结构体,用于记录cost(划分成本的计算结果)和index(在何处划分)
// my struct
struct Cost
{
int index;
double cost_value;
};2)声明一个函数compute_cost,用于计算xyz轴中按照任意一个轴进行划分时的最小成本,返回一个Cost类型的变量(划分方案&最小成本)
// my func
// 参数解释:
// objects为未划分的primitives(三角形)列表
// b为分成几个buckets
// p为一个bucket中有几个primitives(即三角形)
// dim为维度,0为x轴,1为y轴,2为z轴
Cost compute_cost(std::vector<Object*> objects, int b, int p, int dim)
{
// 先将xyz轴按照升序排列
switch (dim)
{
case 0: // for x axis
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {
return f1->getBounds().Centroid().x <
f2->getBounds().Centroid().x;
});
break;
case 1: // for y axis
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2){
return f1->getBounds().Centroid().y <
f2->getBounds().Centroid().y;
});
break;
case 2: // for z axis
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2){
return f1->getBounds().Centroid().z <
f2->getBounds().Centroid().z;
});
break;
}
// 记录cost的列表
std::vector<Cost> cost_list;
// 循环计算不同划分方案的成本
Bounds3 bucketA;
// 将buckets从小到大逐个加入划分方案
for (int i = 0; i < b-1; ++i) {
for (int j = 0; j < p; ++j) {
// 将bucket中的元素从小到大加入包围盒A中
bucketA = Union(bucketA, objects[p*i+j]->getBounds());
}
// 将剩余的元素从小到大加入包围盒B中
Bounds3 bucketB;
for (int k = p*(i+1); k < objects.size(); ++k) {
bucketB = Union(bucketB, objects[k]->getBounds());
}
// 计算成本
double sA = bucketA.SurfaceArea(); // 获取包围盒A的表面积
double sB = bucketB.SurfaceArea();
double nA = (i+1)*p; // 包围盒A中的primitives(三角形)的个数
double nB = objects.size() - nA;
double cost_val = sA*nA + sB*nB; // compute cost
Cost cost;
cost.index = p*(i+1)-1;
cost.cost_value = cost_val;
cost_list.emplace_back(cost);
}
// 按照升序排列(第一个为cost的最小值)
std::sort(cost_list.begin(), cost_list.end(), [](auto f1, auto f2){
return f1.cost_value < f2.cost_value;
});
// 返回cost最小值(和对应的划分方案index)
return cost_list[0];
}3)声明一个函数get_partition_axis,对比xyz轴的各自最小划分成本,方便后续选择划分成本最小的轴进行划分:
// my func
Cost get_partition_axis(Cost cost_x, Cost cost_y, Cost cost_z, int& dim)
{
if (cost_x.cost_value < cost_y.cost_value && cost_x.cost_value < cost_z.cost_value) {
dim = 0;
return cost_x;
} else if (cost_y.cost_value < cost_z.cost_value) {
dim = 1;
return cost_y;
} else {
dim = 2;
return cost_z;
}
}4)最后是BVHAccel::recursiveSAHBuild函数的实现:
BVHBuildNode* BVHAccel::recursiveSAHBuild(std::vector<Object*> objects)
{
BVHBuildNode* node = new BVHBuildNode();
// num of primitives in a bucket
// cannot be smaller than 2!
int p = 5;
if (objects.size() <= p) {
node = recursiveBuild(objects);
return node;
}
int b = objects.size() / p; // num of buckets
if (objects.size() % p != 0) b++;
Cost cost_x;
Cost cost_y;
Cost cost_z;
Cost final_cost;
int dim = 0; // 默认按照x轴划分,防bug
cost_x = compute_cost(objects, b, p, 0);
cost_y = compute_cost(objects, b, p, 1);
cost_z = compute_cost(objects, b, p, 2);
final_cost = get_partition_axis(cost_x, cost_y, cost_z, dim);
switch (dim) {
case 0:
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {
return f1->getBounds().Centroid().x <
f2->getBounds().Centroid().x;
});
break;
case 1:
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {
return f1->getBounds().Centroid().y <
f2->getBounds().Centroid().y;
});
break;
case 2:
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {
return f1->getBounds().Centroid().z <
f2->getBounds().Centroid().z;
});
break;
}
auto beginning = objects.begin();
auto middling = objects.begin() + final_cost.index; // SAH changed
auto ending = objects.end();
auto leftshapes = std::vector<Object*>(beginning, middling);
auto rightshapes = std::vector<Object*>(middling, ending);
assert(objects.size() == (leftshapes.size() + rightshapes.size()));
node->left = recursiveSAHBuild(leftshapes);
node->right = recursiveSAHBuild(rightshapes);
node->bounds = Union(node->left->bounds, node->right->bounds);
return node;
}需要运行SAH的时候,记得需要修改如下两处:
第一处,修改默认splitMethod的值:
// BVHAccel Declarations
inline int leafNodes, totalLeafNodes, totalPrimitives, interiorNodes;
class BVHAccel {
public:
// BVHAccel Public Types
enum class SplitMethod { NAIVE, SAH };
// 从这里开始
// BVHAccel Public Methods
// BVHAccel(std::vector<Object*> p, int maxPrimsInNode = 1, SplitMethod splitMethod = SplitMethod::NAIVE);
// 把上面注释掉的那一句,改成下面这一句
BVHAccel(std::vector<Object*> p, int maxPrimsInNode = 1, SplitMethod splitMethod = SplitMethod::SAH);
// 到这里为止
Bounds3 WorldBound() const;
~BVHAccel();
Intersection Intersect(const Ray &ray) const;
Intersection getIntersection(BVHBuildNode* node, const Ray& ray)const;
bool IntersectP(const Ray &ray) const;
BVHBuildNode* root;
// BVHAccel Private Methods
BVHBuildNode* recursiveBuild(std::vector<Object*>objects);
BVHBuildNode* recursiveSAHBuild(std::vector<Object*>objects); // my func
// BVHAccel Private Data
const int maxPrimsInNode;
const SplitMethod splitMethod;
std::vector<Object*> primitives;
};第二处,在BVHAccel::BVHAccel() (BVH.cpp)中:
BVHAccel::BVHAccel(std::vector<Object*> p, int maxPrimsInNode, SplitMethod splitMethod)
: maxPrimsInNode(std::min(255, maxPrimsInNode)), splitMethod(splitMethod),
primitives(std::move(p))
{
time_t start, stop;
time(&start);
if (primitives.empty())
return;
// 从这里开始
if (splitMethod == SplitMethod::NAIVE) {
root = recursiveBuild(primitives);
} else if (splitMethod == SplitMethod::SAH) {
root = recursiveSAHBuild(primitives); // for SAH
}
// 到这里结束
time(&stop);
double diff = difftime(stop, start);
int hrs = (int)diff / 3600;
int mins = ((int)diff / 60) - (hrs * 60);
int secs = (int)diff - (hrs * 3600) - (mins * 60);
printf(
"\rBVH Generation complete: \nTime Taken: %i hrs, %i mins, %i secs\n\n",
hrs, mins, secs);
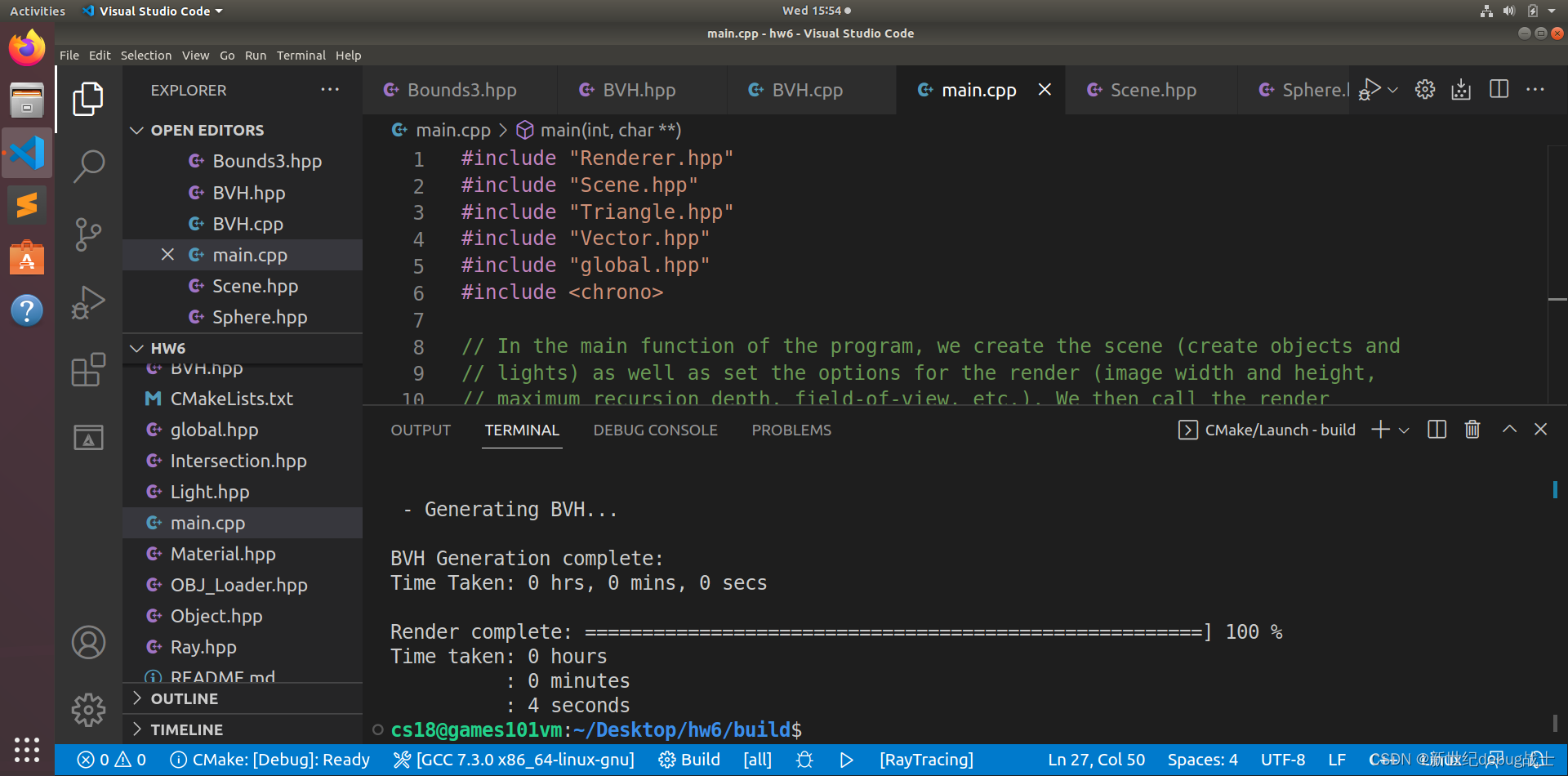
}然后大功告成,可以编译运行啦!
SAH运行之后的结果:耗时3秒(比BVH的4秒少1秒)