opencv图像滤波
1、介绍
OpenCV图像处理技术中比较热门的图像滤波操作主要被分为了两大类:线性邻域滤波和非线性滤波。线性邻域滤波常见的有“方框滤波“,”均值滤波“和”高斯滤波“三种,二常见的非线性滤波主要是中值滤波”和“双边滤波”。本文将将简略介绍这几种滤波操作的不同点,以及他们各自的特点。
2、理论与概念讲解
图像滤波,即在尽量保留图像细节特征的条件下对目标图像的噪声进行抑制,是图像预处理中不可缺少的操作,其处理效果的好坏将直接影响到后续图像处理和分析的有效性和可靠性。消除图像中的噪声成分叫作图像的平滑化或滤波操作。信号或图像的能量大部分集中在幅度谱的低频和中频段是很常见的,而在较高频段,感兴趣的信息经常被噪声淹没。因此一个能降低高频成分幅度的滤波器就能够减弱噪声的影响。图像滤波的目的有两个:一是抽出对象的特征作为图像识别的特征模式;另一个是为适应图像处理的要求,消除图像数字化时所混入的噪声。而对滤波处理的要求也有两条:一是不能损坏图像的轮廓及边缘等重要信息;二是使图像清晰视觉效果好。
“平滑处理“(smoothing)也称“模糊处理”(bluring),是一项简单且使用频率很高的图像处理方法。平滑处理的用途有很多,最常见的是用来减少图像上的噪点或者失真。在涉及到降低图像分辨率时,平滑处理是非常好用的方法。平滑滤波是低频增强的空间域滤波技术。它的目的有两类:一类是模糊;另一类是消除噪音。空间域的平滑滤波一般采用简单平均法进行,就是求邻近像元点的平均亮度值。邻域的大小与平滑的效果直接相关,邻域越大平滑的效果越好,但邻域过大,平滑会使边缘信息损失的越大,从而使输出的图像变得模糊,因此需合理选择邻域的大小。关于滤波器,一种形象的比喻法是:我们可以把滤波器想象成一个包含加权系数的窗口,当使用这个滤波器平滑处理图像时,就把这个窗口放到图像之上,透过这个窗口来看我们得到的图像。
2.1、邻域算子与线性邻域滤波
邻域算子(局部算子)是利用给定像素周围的像素值的决定此像素的最终输出值的一种算子。而线性邻域滤波是一种常用的邻域算子,像素的输出值取决于输入像素的加权和,具体过程如下图。邻域算子除了用于局部色调调整以外,还可以用于图像滤波,实现图像的平滑和锐化,图像边缘增强或者图像噪声的去除。本篇文章,我们介绍的主角是线性邻域滤波算子,即用不同的权重去结合一个小邻域内的像素,来得到应有的处理效果。
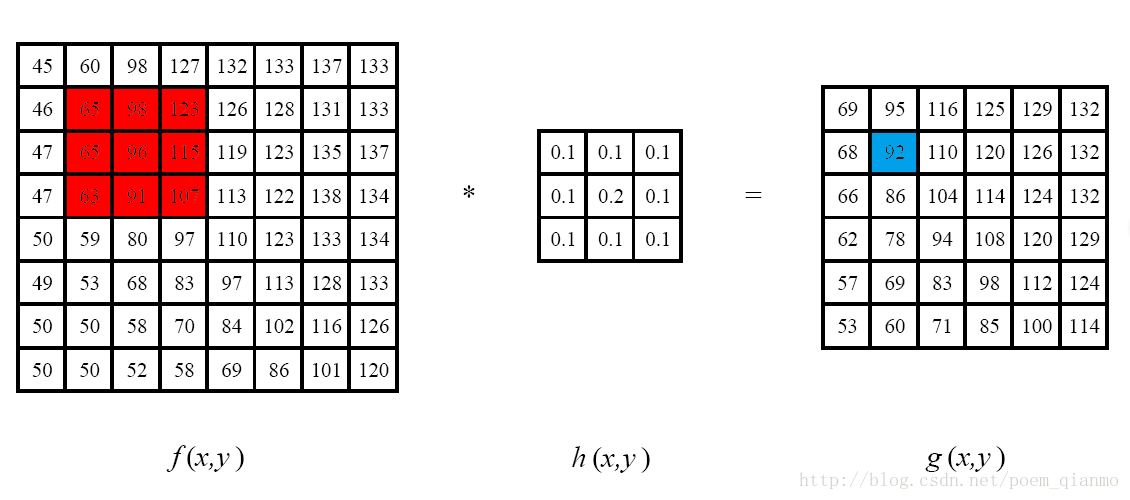
图注:邻域滤波(卷积):左边图像与中间图像的卷积产生右边图像。目标图像中蓝色标记的像素是利用原图像中红色标记的像素计算得到的。
线性滤波处理的输出像素值


其中的加权和为 ,我们称其为“核”,滤波器的加权系数,即滤波器的“滤波系数”。
上面的式子可以简单写作:

其中f表示输入像素值,h表示加权系数“核“,g表示输出像素值
2.2、非线性滤波
我们所考虑的滤波器都是线性的,即两个信号之和的响应和他们各自响应之和相等。换句话说,每个像素的输出值是一些输入像素的加权和,线性滤波器易于构造,并且易于从频率响应角度来进行分析。其实在很多情况下,使用邻域像素的非线性滤波也许会得到更好的效果。比如在噪声是散粒噪声而不是高斯噪声,即图像偶尔会出现很大的值的时候。在这种情况下,用高斯滤波器对图像进行模糊的话,噪声像素是不会被去除的,它们只是转换为更为柔和但仍然可见的散粒。
3、线性邻域滤波
3.1、方框滤波(box Filter)
boxFilter()函数方框滤波所用的核为:

其中:
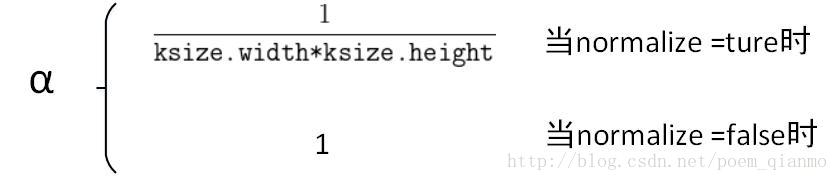
其中f表示原图,h表示核,g表示目标图,当normalize=true的时候,方框滤波就变成了我们熟悉的均值滤波。也就是说,均值滤波是方框滤波归一化(normalized)后的特殊情况。其中,归一化就是把要处理的量都缩放到一个范围内,比如(0,1),以便统一处理和直观量化。
void boxFilter(InputArray src,OutputArray dst, int ddepth, Size ksize, Point anchor=Point(-1,-1), boolnormalize=true, int borderType=BORDER_DEFAULT )
- 第一个参数,InputArray类型的src,输入图像,即源图像,填Mat类的对象即可。该函数对通道是独立处理的,且可以处理任意通道数的图片,但需要注意,待处理的图片深度应该为CV_8U, CV_16U, CV_16S, CV_32F 以及 CV_64F之一。
- 第二个参数,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。
- 第三个参数,int类型的ddepth,输出图像的深度,-1代表使用原图深度,即src.depth()。
- 第四个参数,Size类型(对Size类型稍后有讲解)的ksize,内核的大小。一般这样写Size( w,h )来表示内核的大小( 其中,w 为像素宽度, h为像素高度)。Size(3,3)就表示3x3的核大小,Size(5,5)就表示5x5的核大小
- 第五个参数,Point类型的anchor,表示锚点(即被平滑的那个点),注意他有默认值Point(-1,-1)。如果这个点坐标是负值的话,就表示取核的中心为锚点,所以默认值Point(-1,-1)表示这个锚点在核的中心。
- 第六个参数,bool类型的normalize,默认值为true,一个标识符,表示内核是否被其区域归一化(normalized)了。
- 第七个参数,int类型的borderType,用于推断图像外部像素的某种边界模式。有默认值BORDER_DEFAULT,我们一般不去管它。
3.2、均值滤波(blur)
均值滤波,是最简单的一种滤波操作,输出图像的每一个像素是核窗口内输入图像对应像素的像素的平均值( 所有像素加权系数相等),其实说白了它就是归一化后的方框滤波。均值滤波是典型的线性滤波算法,主要方法为邻域平均法,即用一片图像区域的各个像素的均值来代替原图像中的各个像素值
void blur(InputArray src, OutputArraydst, Size ksize, Point anchor=Point(-1,-1), int borderType=BORDER_DEFAULT )
- 第一个参数,InputArray类型的src,输入图像,即源图像,填Mat类的对象即可。该函数对通道是独立处理的,且可以处理任意通道数的图片,但需要注意,待处理的图片深度应该为CV_8U, CV_16U, CV_16S, CV_32F 以及 CV_64F之一。
- 第二个参数,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。比如可以用Mat::Clone,以源图片为模板,来初始化得到如假包换的目标图。
- 第三个参数,Size类型(对Size类型稍后有讲解)的ksize,内核的大小。一般这样写Size( w,h )来表示内核的大小( 其中,w 为像素宽度, h为像素高度)。Size(3,3)就表示3x3的核大小,Size(5,5)就表示5x5的核大小
- 第四个参数,Point类型的anchor,表示锚点(即被平滑的那个点),注意他有默认值Point(-1,-1)。如果这个点坐标是负值的话,就表示取核的中心为锚点,所以默认值Point(-1,-1)表示这个锚点在核的中心。
- 第五个参数,int类型的borderType,用于推断图像外部像素的某种边界模式。有默认值BORDER_DEFAULT,我们一般不去管它。
3.3、高斯滤波(GaussianBlur)
GaussianBlur函数的作用是用高斯滤波器来模糊一张图片,对输入的图像src进行高斯滤波后用dst输出。它将源图像和指定的高斯核函数做卷积运算,并且支持就地过滤(In-placefiltering)。
void GaussianBlur(InputArray src,OutputArray dst, Size ksize, double sigmaX, double sigmaY=0, intborderType=BORDER_DEFAULT )
- 第一个参数,InputArray类型的src,输入图像,即源图像,填Mat类的对象即可。它可以是单独的任意通道数的图片,但需要注意,图片深度应该为CV_8U,CV_16U, CV_16S, CV_32F 以及 CV_64F之一。
- 第二个参数,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。比如可以用Mat::Clone,以源图片为模板,来初始化得到如假包换的目标图。
- 第三个参数,Size类型的ksize高斯内核的大小。其中ksize.width和ksize.height可以不同,但他们都必须为正数和奇数。或者,它们可以是零的,它们都是由sigma计算而来。
- 第四个参数,double类型的sigmaX,表示高斯核函数在X方向的的标准偏差。
- 第五个参数,double类型的sigmaY,表示高斯核函数在Y方向的的标准偏差。若sigmaY为零,就将它设为sigmaX,如果sigmaX和sigmaY都是0,那么就由ksize.width和ksize.height计算出来。
- 为了结果的正确性着想,最好是把第三个参数Size,第四个参数sigmaX和第五个参数sigmaY全部指定到。
- 第六个参数,int类型的borderType,用于推断图像外部像素的某种边界模式。有默认值BORDER_DEFAULT,我们一般不去管它。
3.4、中值滤波(Median filter)
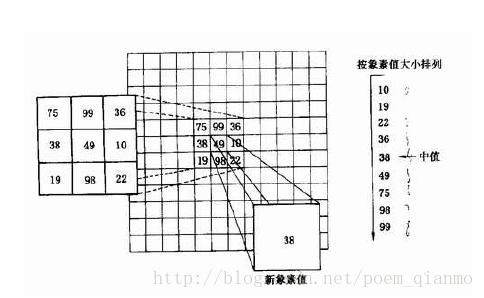
中值滤波(Median filter)是一种典型的非线性滤波技术,基本思想是用像素点邻域灰度值的中值来代替该像素点的灰度值,该方法在去除脉冲噪声、椒盐噪声的同时又能保留图像边缘细节,中值滤波是基于排序统计理论的一种能有效抑制噪声的非线性信号处理技术,其基本原理是把数字图像或数字序列中一点的值用该点的一个邻域中各点值的中值代替,让周围的像素值接近的真实值,从而消除孤立的噪声点,对于斑点噪声(speckle noise)和椒盐噪声(salt-and-pepper noise)来说尤其有用,因为它不依赖于邻域内那些与典型值差别很大的值。中值滤波器在处理连续图像窗函数时与线性滤波器的工作方式类似,但滤波过程却不再是加权运算。中值滤波器与均值滤波器比较的优势:在均值滤波器中,由于噪声成分被放入平均计算中,所以输出受到了噪声的影响,但是在中值滤波器中,由于噪声成分很难选上,所以几乎不会影响到输出。因此同样用3x3区域进行处理,中值滤波消除的噪声能力更胜一筹。中值滤波无论是在消除噪声还是保存边缘方面都是一个不错的方法。中值滤波器与均值滤波器比较的劣势:中值滤波花费的时间是均值滤波的5倍以上。这一过程如图下图所示.一般采用奇数点的邻域来计算中值,但如果像素点数为偶数时,中值就取排序像素中间两点的平均值.采用大小不同邻域的中值滤波器的结果如图。
void medianBlur(InputArray src,OutputArray dst, int ksize)
- 第一个参数,InputArray类型的src,函数的输入参数,填1、3或者4通道的Mat类型的图像;当ksize为3或者5的时候,图像深度需为CV_8U,CV_16U,或CV_32F其中之一,而对于较大孔径尺寸的图片,它只能是CV_8U。
- 第二个参数,OutputArray类型的dst,即目标图像,函数的输出参数,需要和源图片有一样的尺寸和类型。我们可以用Mat::Clone,以源图片为模板,来初始化得到如假包换的目标图。
- 第三个参数,int类型的ksize,孔径的线性尺寸(aperture linear size),注意这个参数必须是大于1的奇数,比如:3,5,7,9 ...
3.5、双边滤波(Bilateral filter)
双边滤波(Bilateral filter)是一种非线性的滤波方法,是结合图像的空间邻近度和像素值相似度的一种折衷处理,同时考虑空域信息和灰度相似性,达到保边去噪的目的。具有简单、非迭代、局部的特点。双边滤波器的好处是可以做边缘保存(edge preserving),一般过去用的维纳滤波或者高斯滤波去降噪,都会较明显地模糊边缘,对于高频细节的保护效果并不明显。双边滤波器顾名思义比高斯滤波多了一个高斯方差sigma-d,它是基于空间分布的高斯滤波函数,所以在边缘附近,离的较远的像素不会太多影响到边缘上的像素值,这样就保证了边缘附近像素值的保存。但是由于保存了过多的高频信息,对于彩色图像里的高频噪声,双边滤波器不能够干净的滤掉,只能够对于低频信息进行较好的滤波。
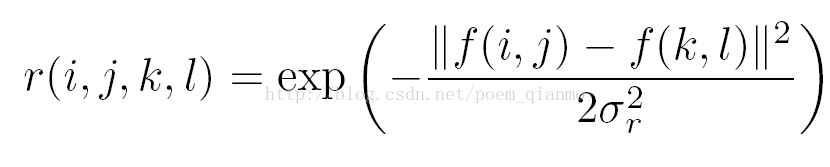
在双边滤波器中,输出像素的值依赖于邻域像素值的加权值组合:
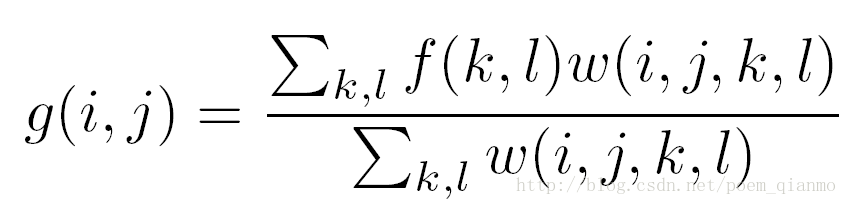
而加权系数w(i,j,k,l)取决于定义域核和值域核的乘积。其中定义域核表示如下(如图):

定义域滤波对应图示: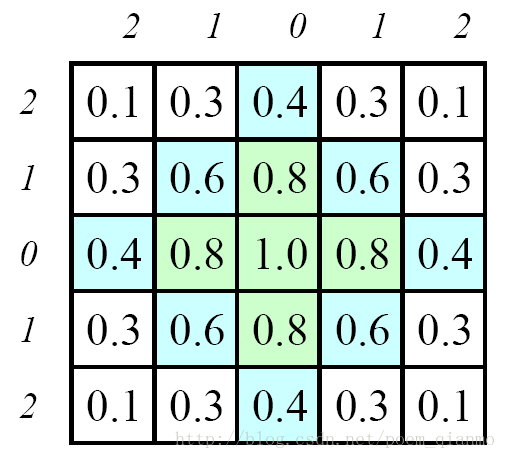
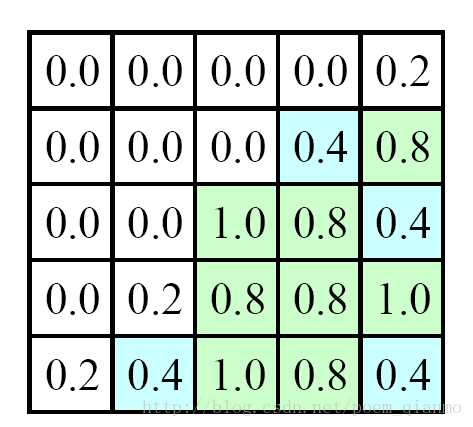
值域核表示为:
值域滤波:
两者相乘后,就会产生依赖于数据的双边滤波权重函数:

void bilateralFilter(InputArray src, OutputArraydst, int d, double sigmaColor, double sigmaSpace, int borderType=BORDER_DEFAULT)
- 第一个参数,InputArray类型的src,输入图像,即源图像,需要为8位或者浮点型单通道、三通道的图像。
- 第二个参数,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。
- 第三个参数,int类型的d,表示在过滤过程中每个像素邻域的直径。如果这个值我们设其为非正数,那么OpenCV会从第五个参数sigmaSpace来计算出它来。
- 第四个参数,double类型的sigmaColor,颜色空间滤波器的sigma值。这个参数的值越大,就表明该像素邻域内有更宽广的颜色会被混合到一起,产生较大的半相等颜色区域。
- 第五个参数,double类型的sigmaSpace坐标空间中滤波器的sigma值,坐标空间的标注方差。他的数值越大,意味着越远的像素会相互影响,从而使更大的区域足够相似的颜色获取相同的颜色。当d>0,d指定了邻域大小且与sigmaSpace无关。否则,d正比于sigmaSpace。
- 第六个参数,int类型的borderType,用于推断图像外部像素的某种边界模式。注意它有默认值BORDER_DEFAULT。