【论文阅读】Globally Consistent and Tightly Coupled 3D LiDAR Inertial Mapping
这篇论文提出了一个改进的地图生成方法,使用的传感器是激光雷达,所以这里也划分到激光SLAM的范畴下了。论文提出的框架的改进主要在两方面,一方面是使用了基于体素化的GICP匹配成本因子,采用这种方法可以让更多的点参与配准误差的计算,另一方面是激光雷达和IMU的紧密耦合,这里的紧耦合不仅体现在前端,而且在后端的因子图优化中也大量体现了紧耦合。
基于体素化的GICP匹配成本因子
对于GICP,它本身是一种ICP的改进,也可以叫VGICP,而ICP本身是一种点云配准的方法,个人感觉点云配准就是激光SLAM里面求位姿变化的叫法,NDT和ICP本身都是一种配准的方法。GICP的输入是两帧的点云,将点云利用体素来实现一个离散化,对落入体素内的点的分布情况进行处理,可以得到内部点的高斯分布,那么按照一般SLAM求位姿的思路,我们的流程大概率是列一个残差的式子,然后寻找一个位姿变化T来最小化这个残差,在GICP里面作者使用的是下面这样一个残差的表示方法:
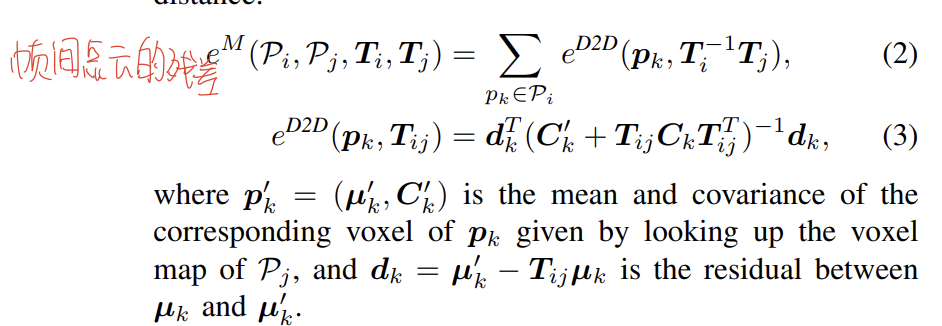
所以这个eM就是GICP的成本因子,我们可以理解为是总的残差里面的一部分,就像VINS一样,当然这篇论文也使用了IMU,所以自然而然也会涉及到IMU的预积分,它也会作为总的残差中的一部分参与优化,关于预积分的内容这里就不提了,额外提一嘴,论文中喜欢用factor这个单词来表示因子图中的联系,或者说是残差项里面的一部分。
激光雷达和IMU的紧密耦合
紧密耦合主要是体现在论文所设计的框架中,这个框架包括四部分,下面简单理顺一下框架。
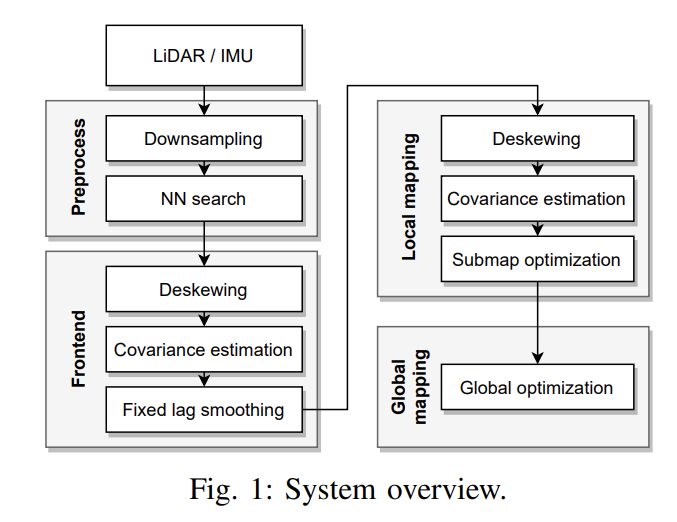
首先是预处理的部分,在这部分中论文作者提到了一个偏移校正的方法,采用时间戳来进行校正。原文的意思个人感觉是给点和体素格子都赋一个时间戳,如果点的时间戳和体素格子的时间戳的偏差超过了一定的范围,就将点移动到另一个体素格子里面去,从而避免在体素进行整合的时候出现明显的偏差。但是论文并没有对这个体素格子的时间戳做说明,个人感觉应该就是进行了一个离群点的剔除,只不过这里离群的定义是依赖于时间戳,由于激光雷达的扫描方法,落入同一个体素格子的点的时间戳应该是大差不差的,用这个时间来做剔除,从而减小噪声点对体素化的负面影响。
论文中对于每一帧都采用了三个量来记录:
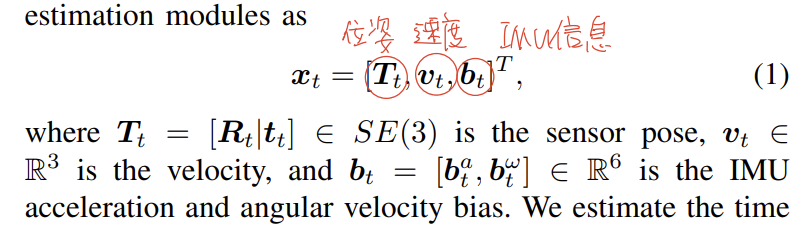
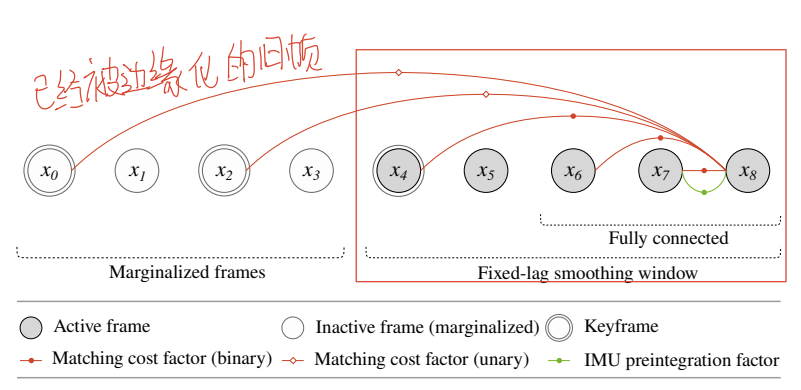
在里程计的部分论文并没有重点记录前端的细节,而是着重讲了后端因子图的部分,关于因子图的维护,论文划分了一个类似滑动窗口的窗口,叫做fixed-lag,在窗口内的帧和关键帧以及窗口外的使用的残差是不一样的,采用这种方法主要是为了限制计算的开销,已经被边缘化掉的帧就当做不需要处理的内容,只为当前帧提供辅助信息。IMU的约束则只放在了最新的两帧之间。
除此之外,在区分关键帧的时候,论文采用了一种重合率的方法,如果重合率小于阈值,就认为是一个新的关键帧,关键帧也存在被剔除的情况,当重合率过小或者关键帧过多的时候,就会剔除冗余的关键帧,关键帧过多的情况是用了一个评分机制,剔除得分最低的关键帧。
局部建图的部分,只要有帧被边缘化掉,就会进入局部建图模块,进入之后会根据重合率,将这一帧划分到一个子图的结构中,这样做是为了减小优化变量的数量。一旦子图中的帧数达到阈值或第一帧和最后一帧之间的重叠小于阈值,使用LM优化器执行因子图优化并根据优化结果将帧合并为一个子图。个人的理解就是将几帧整合为了一个子图,然后让子图作为一个建图的基本单位,但是不太明白的地方在于为什么这里是对所有帧的处理,是不是说激光SLAM里面不存在关键帧这个概念,论文用这种整合为子图的方法很像是在用子图来作为关键帧。
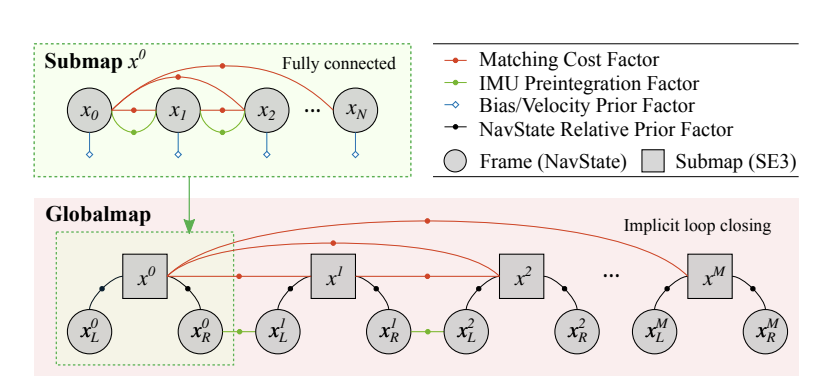
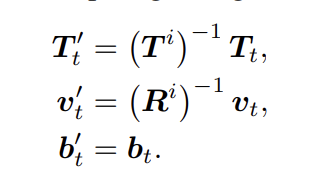
最后全局建图模块对位姿进行校正以获得全局一致的建图结果。因为论文使用的这种因子图的连接方法,会产生一个很密集的因子图,而且存在隐式闭环的可能性,而且可能会丢失信息,因此论文在子图的两边,加了两帧,叫做端点,它们保存子图中第一帧和最后一帧相对于子图位姿的状态的传感器状态,所以,子图的两个端点关于子图的变化可以用下面公式描述:
所以总的来说,这篇论文的中心就在于这个因子图的组织形式,采用的连接方法以及子图、端点的设计,都是服务于因子图优化,但个人没怎么了解过因子图优化,一些论文的内容看的不是很清楚,后面有机会等补一下因子图的内容之后再回来修改。
参考链接:
论文讲解及翻译
GICP算法