opencv remap inverse 这里的x,y是dst下的,所以我没法在知道src的x,y下得到该点在dst的位置.
opencv remap inverse
dst(x,y)=src(mapx(x,y),mapy(x,y))
这里的x,y是dst下的,所以我没法在知道src的x,y下得到该点在dst的位置.自行畸变校正,误差太大.
cv::Mat ImgLeftToTrack, ImgRightToTrack;
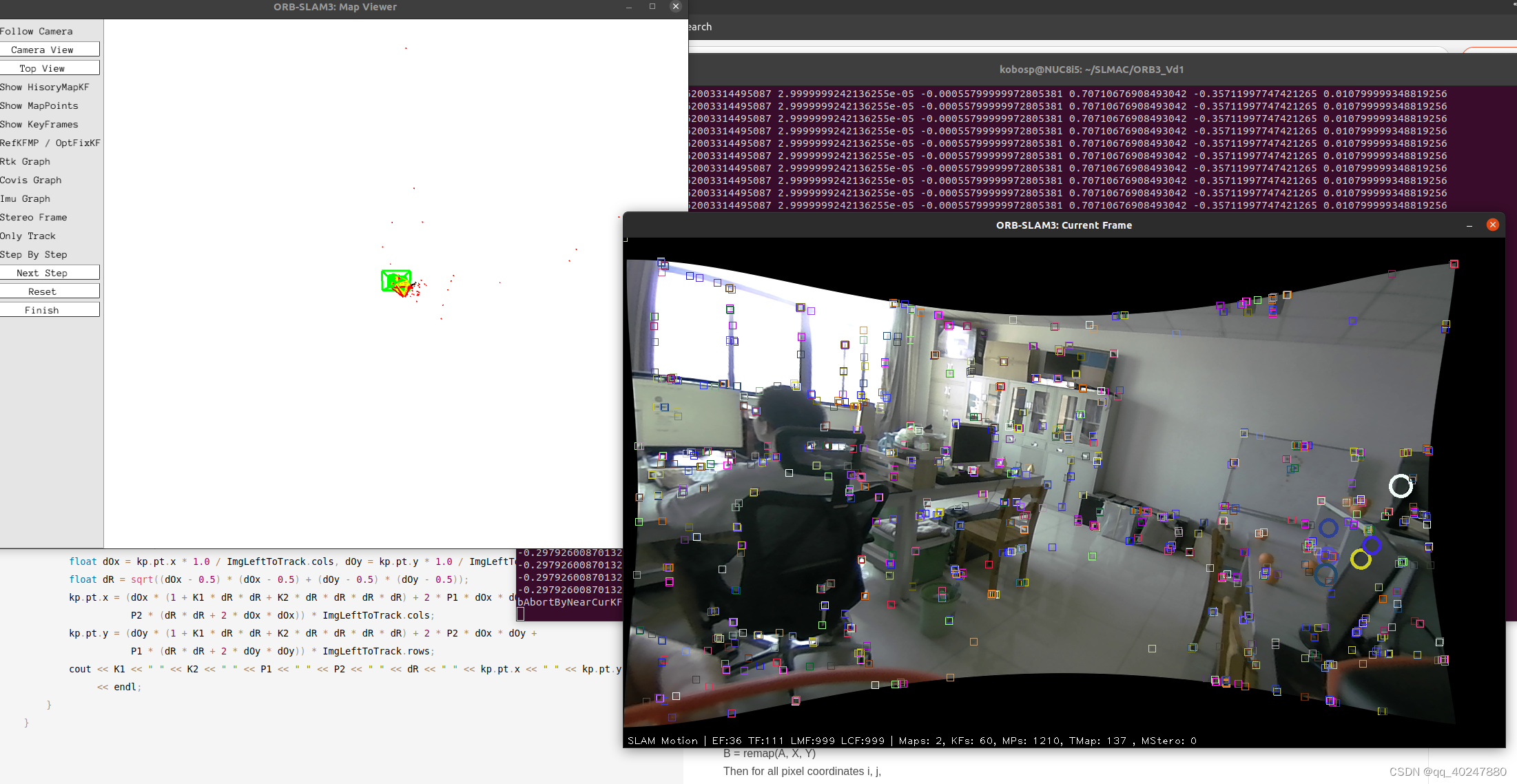
if (mSettings && mSettings->mbNeedToRectify) {
cv::Mat MXL = mSettings->Map1X;
cv::Mat MYL = mSettings->Map1Y;
cv::Mat MXR = mSettings->Map2X;
cv::Mat MYR = mSettings->Map2Y;
cv::remap(ImgLeft, ImgLeftToTrack, MXL, MYL, cv::INTER_LINEAR, cv::BORDER_CONSTANT, 0);
cv::remap(ImgRight, ImgRightToTrack, MXR, MYR, cv::INTER_LINEAR, cv::BORDER_CONSTANT, 0);
cv::Mat DistCoef = mSettings->GetCamera1DistoCoef();
float K1 = DistCoef.at<float>(0, 0),
K2 = DistCoef.at<float>(1, 0),
P1 = DistCoef.at<float>(2, 0),
P2 = DistCoef.at<float>(3, 0);
for (int i = 0; i < vTarsInLeft.size(); i++) {
cv::KeyPoint &kp = vTarsInLeft[i];
float dOx = kp.pt.x * 1.0 / ImgLeftToTrack.cols, dOy = kp.pt.y * 1.0 / ImgLeftToTrack.rows;
float dR = sqrt((dOx - 0.5) * (dOx - 0.5) + (dOy - 0.5) * (dOy - 0.5));
kp.pt.x = (dOx * (1 + K1 * dR * dR + K2 * dR * dR * dR * dR) + 2 * P1 * dOx * dOy +
P2 * (dR * dR + 2 * dOx * dOx)) * ImgLeftToTrack.cols;
kp.pt.y = (dOy * (1 + K1 * dR * dR + K2 * dR * dR * dR * dR) + 2 * P2 * dOx * dOy +
P1 * (dR * dR + 2 * dOy * dOy)) * ImgLeftToTrack.rows;
cout << K1 << " " << K2 << " " << P1 << " " << P2 << " " << dR << " " << kp.pt.x << " " << kp.pt.y
<< endl;
}
}

OpenCV’s remap() uses a real-valued index grid to sample a grid of values from an image using bilinear interpolation, and returns the grid of samples as a new image.
To be precise, let:
A = an image
X = a grid of real-valued X coords into the image.
Y = a grid of real-valued Y coords into the image.
B = remap(A, X, Y)
Then for all pixel coordinates i, j,
B[i, j] = A(X[i, j], Y[i, j])
Where the round-braces notation A(x, y) denotes using bilinear interpolation to solve for the pixel value of image A using float-valued coords x and y.
My question is: given an index grid X, Y, how can I generate an “inverse grid” X^-1, Y^-1 such that:
X(X^-1[i, j], Y^-1[i, j]) = i
Y(X^-1[i, j], Y^-1[i, j]) = j
And
X^-1(X[i, j], Y[i, j]) = i
Y^-1(X[i, j], Y[i, j]) = j
For all integer pixel coordinates i, j?
FWIW, the image and index maps X and Y are the same shape. However, there is no a priori structure to the index maps X and Y. For example, they’re not necessarily affine or rigid transforms. They may even be uninvertible, e.g. if X, Y maps multiple pixels in A to the same exact pixel coordinate in B. I’m looking for ideas for a method that will find a reasonable inverse map if one exists.
The solution need not be OpenCV-based, as I’m not using OpenCV, but another library that has a remap() implementation. While any suggestions are welcome, I’m particularly keen on something that’s “mathematically correct”, i.e. if my map M is perfectly invertible, the method should find the perfect inverse, within some small margin of machine precision.
opencv
math
image-processing
remap
bilinear-interpolation
Share
Improve this question
Follow
edited Feb 2, 2017 at 11:32
asked Jan 17, 2017 at 17:17
user avatar
SuperElectric
16.2k99 gold badges4848 silver badges6464 bronze badges
Add a comment
11 Answers
Sorted by:
Highest score (default)
11
Well I just had to solve this remap inversion problem myself and I’ll outline my solution.
Given X, Y for the remap() function that does the following:
B[i, j] = A(X[i, j], Y[i, j])
I computed Xinv, Yinv that can be used by the remap() function to invert the process:
A[x, y] = B(Xinv[x,y],Yinv[x,y])
First I build a KD-Tree for the 2D point set {(X[i,j],Y[i,j]} so I can efficiently find the N nearest neighbors to a given point (x,y). I use Euclidian distance for my distance metric. I found a great C++ header lib for KD-Trees on GitHub.
Then I loop thru all the (x,y) values in A’s grid and find the N = 5 nearest neighbors {(X[i_k,j_k],Y[i_k,j_k]) | k = 0 … N-1} in my point set.
If distance d_k == 0 for some k then Xinv[x,y] = i_k and Yinv[x,y] = j_k, otherwise…
Use Inverse Distance Weighting (IDW) to compute an interpolated value:
let weight w_k = 1 / pow(d_k, p) (I use p = 2)
Xinv[x,y] = (sum_k w_k * i_k)/(sum_k w_k)
Yinv[x,y] = (sum_k w_k * j_k)/(sum_k w_k)
Note that if B is a W x H image then X and Y are W x H arrays of floats. If A is a w x h image then Xinv and Yinv are w x h arrays for floats. It is important that you are consistent with image and map sizing.
Works like a charm! My first version I tried brute forcing the search and I never even waited for it to finish. I switched to a KD-Tree then I started to get reasonable run times. I f I ever get time I would like to add this to OpenCV.
The second image below is use remap() to remove the lens distortion from the first image. The third image is a result of inverting the process.
enter image description here enter image description here enter image description here