[单片机框架][bsp层][N32G4FR][bsp_pwm] pwm配置和使用
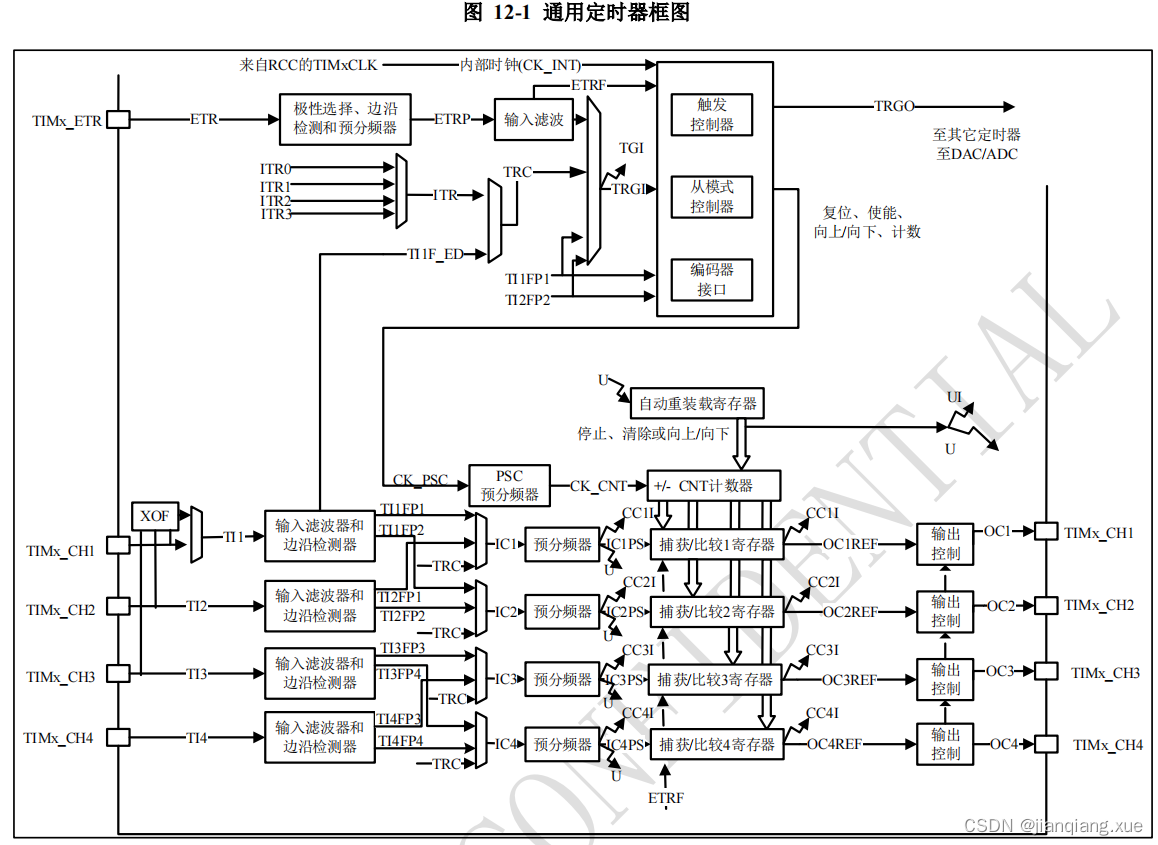
TIMx 主要功能
通用 TIMx (TIM2、TIM3、TIM4 和 TIM5)定时器功能包括:
16 位向上、向下、向上/向下自动装载计数器
16 位可编程(可以实时修改)预分频器,计数器时钟频率的分频系数为 1~65536 之间的任意数值
4 个独立通道:
输入捕获
输出比较
PWM 生成(边缘或中间对齐模式)
单脉冲模式输出
使用外部信号控制定时器和定时器互连的同步电路
如下事件发生时产生中断/DMA:
更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
输入捕获
输出比较
支持针对定位的增量(正交)编码器和霍尔传感器电路
支持捕获 IO 信号或比较器输出信号
触发输入作为外部时钟或者按周期的电流管理
PWM 模式
脉冲宽度调制(PWM)模式可以产生一个由 TIMx_AR 寄存器确定频率、由 TIMx_CCDATx 寄存器确定占
空比的信号。
TIMx_CCMODx 寄存器中的 OCxMD 位写入’110’(PWM 模式 1)或’111’(PWM 模式 2),能够独立地设置每个 OCx 输出通道产生一路 PWM。必须设置 TIMx_CCMODx 寄存器 OCxPEN 位以使能相应的预装载寄存器,最后还要设置 TIMx_CTRL1 寄存器的 ARPEN 位,(在向上计数或中心对称模式中)使能自动重装载的预装载寄存器。
仅当发生一个更新事件的时候,预装载寄存器才能被传送到影子寄存器,因此在计数器开始计数之前,必须通过设置 TIMx_EVTGEN 寄存器中的 UDGN 位来初始化所有的寄存器。
OCx 的极性可以通过软件在 TIMx_CCEN 寄存器中的 CCxP 位进行设置,它可以设置为高电平有效或低电平有效。
TIMx_CCEN 寄存器中的 CCxEN 位控制 OCx 输出使能。详见 TIMx_CCENx 寄存器的描述。 在 PWM 模式(模式 1 或模式 2)下,TIMx_CNT 和 TIMx_CCDATx 始终在进行比较,(依据计数器的计数方 向 )以 确 定 是 否 符 合 TIMx_CCDATx≤TIMx_CNT或 者 TIMx_CNT≤TIMx_CCDATx。
然而为了 与 OCREF_CLR 的功能(在下一个 PWM 周期之前,ETR 信号上的一个外部事件能够清除 OCxREF)一致,OCxREF 信号只能在下述条件下产生:
当比较的结果改变
当输出比较模式(TIMx_CCMODx 寄存器中的 OCxMD 位)从“冻结”(无比较,OCxMD=’000’)切换到某个 PWM 模式(OCxMD=’110’或’111’)。
这样在运行中可以通过软件强置 PWM 输出。
根据 TIMx_CTRL1 寄存器中 CAMSEL 位的状态,定时器能够产生边沿对齐的 PWM 信号或中央对齐的PWM 信号。
PWM 边沿对齐模式
向上计数配置
当 TIMx_CTRL1 寄存器中的 DIR 位为低的时候执行向上计数。参看 12.3.2 节。
当 TIMx_CNT<TIMx_CCDATx 时 PWM 信号参考 OCxREF 为高,否则为低。如果 TIMx_CCDATx 中的比
较值大于自动重装载值(TIMx_AR),则 OCxREF 保持为’1’。如果比较值为 0,则 OCxREF 保持为’0’。
下图为 TIMx_AR=8 时边沿对齐的 PWM 波形示例。
#include "n32g4fr.h"
#include "n32g4fr_tim.h"
#include "bsp_pwm.h"
#include "errorno.h"
#define PWM_TIM1 (uint32_t)TIM1
#define PWM_TIM2 (uint32_t)TIM2
#define PWM_TIM3 (uint32_t)TIM3
#define PWM_TIM5 (uint32_t)TIM5
#define PWM_TIM8 (uint32_t)TIM8
#define GPIO_A_GROUP (uint32_t)GPIOA
#define GPIO_B_GROUP (uint32_t)GPIOB
#define DBG_CTRL (uint32_t*)0xE0042004
#define _DBG_TIM1_STOP (1 << 10)
#define _DBG_TIM8_STOP (1 << 17)
#define PWM_CONFIG_PIN 0
#define PWM_CONFIG_TIM 1
#define PWM_CONFIG_CH 2
#define PWM_CONFIG_GROUP 3
#define PWM_CH1 0
#define PWM_CH2 1
#define PWM_CH3 2
#define PWM_CH4 3
#define APB1_PRES_VALUE 11
#define APB2_PRES_VALUE 4
const static uint32_t pwm_config[10][4] =
{
{ GPIO_PIN_0, PWM_TIM5, PWM_CH1, GPIO_A_GROUP }, // PA0
{ GPIO_PIN_6, PWM_TIM3, PWM_CH1, GPIO_A_GROUP }, // PA6 conflict with i2c
{ GPIO_PIN_7, PWM_TIM8, PWM_CH1, GPIO_A_GROUP }, // PA7
{ GPIO_PIN_8, PWM_TIM1, PWM_CH1, GPIO_A_GROUP }, // PA8
{ GPIO_PIN_9, PWM_TIM1, PWM_CH2, GPIO_A_GROUP }, // PA9 conflict with uart
{ GPIO_PIN_10, PWM_TIM1, PWM_CH3, GPIO_A_GROUP }, // PA10
{ GPIO_PIN_11, PWM_TIM1, PWM_CH4, GPIO_A_GROUP }, // PA11
{ GPIO_PIN_5, PWM_TIM3, PWM_CH2, GPIO_B_GROUP }, // PB5_C
{ GPIO_PIN_10, PWM_TIM2, PWM_CH3, GPIO_B_GROUP }, // PB10_C conflict with i2c
{ GPIO_PIN_11, PWM_TIM2, PWM_CH4, GPIO_B_GROUP }, // PB11_C conflict with i2c
};
static void bsp_pwm_en_dbg_stop(void)
{
uint32_t* p = DBG_CTRL;
*p |= DBG_TIM1_STOP;
*p |= DBG_TIM8_STOP;
}
static void bsp_pwm_gpio_remap(int pin)
{
if (pwm_config[pin][PWM_CONFIG_TIM] == PWM_TIM1)
{
GPIO_ConfigPinRemap(GPIO_ALL_RMP_TIM1, ENABLE);
}
else if (pwm_config[pin][PWM_CONFIG_TIM] == PWM_TIM2)
{
GPIO_ConfigPinRemap(GPIO_ALL_RMP_TIM2, ENABLE);
}
else if (pwm_config[pin][PWM_CONFIG_TIM] == PWM_TIM3)
{
GPIO_ConfigPinRemap(GPIO_PART1_RMP_TIM3, ENABLE);
}
}
static void bsp_pwm_init_cmp(int pin, OCInitType tim_oc_init_st)
{
uint32_t PWM_CMP = pwm_config[pin][PWM_CONFIG_CH];
TIM_Module* TIMx = (TIM_Module*)pwm_config[pin][PWM_CONFIG_TIM];
if (PWM_CMP == PWM_CH1)
{
TIM_InitOc1(TIMx, &tim_oc_init_st);
}
else if (PWM_CMP == PWM_CH2)
{
TIM_InitOc2(TIMx, &tim_oc_init_st);
}
else if (PWM_CMP == PWM_CH3)
{
TIM_InitOc3(TIMx, &tim_oc_init_st);
}
else if (PWM_CMP == PWM_CH4)
{
TIM_InitOc4(TIMx, &tim_oc_init_st);
}
}
void bsp_pwm_init(uint8_t pin, uint8_t val)
{
uint16_t Channel_Pulse = 0;
uint16_t PrescalerValue = 0;
uint16_t timer_period = BSP_PWM_FULL;
GPIO_InitType GPIO_InitStructure;
TIM_TimeBaseInitType TIM_TimeBaseStructure;
OCInitType TIM_OCInitStructure;
TIM_Module* TIMx = (TIM_Module*)pwm_config[pin][PWM_CONFIG_TIM];
RCC_EnableAPB1PeriphClk(RCC_APB1_PERIPH_TIM2 | RCC_APB1_PERIPH_TIM3 | RCC_APB1_PERIPH_TIM5, ENABLE);
RCC_EnableAPB2PeriphClk(RCC_APB2_PERIPH_GPIOA | RCC_APB2_PERIPH_GPIOB | RCC_APB2_PERIPH_TIM1 |
RCC_APB2_PERIPH_AFIO | RCC_APB2_PERIPH_TIM8, ENABLE);
if (pin >= BSP_PWM_8)
{
bsp_pwm_gpio_remap(pin);
}
GPIO_InitStructure.Pin = pwm_config[pin][PWM_CONFIG_PIN];
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitPeripheral((GPIO_Module*)pwm_config[pin][PWM_CONFIG_GROUP], &GPIO_InitStructure);
if ((TIMx == (TIM_Module*)PWM_TIM1)||(TIMx == (TIM_Module*)PWM_TIM8))
{
bsp_pwm_en_dbg_stop();
PrescalerValue = APB1_PRES_VALUE;
}
else
{
PrescalerValue = APB2_PRES_VALUE;
}
Channel_Pulse = (uint16_t)((val * (timer_period - 1)) / 100);
TIM_TimeBaseStructure.Prescaler = PrescalerValue;
TIM_TimeBaseStructure.CntMode = TIM_CNT_MODE_UP;
TIM_TimeBaseStructure.Period = timer_period;
TIM_TimeBaseStructure.ClkDiv = 0;
TIM_TimeBaseStructure.RepetCnt = 0;
TIM_InitTimeBase(TIMx, &TIM_TimeBaseStructure);
TIM_OCInitStructure.OcMode = TIM_OCMODE_PWM2;
TIM_OCInitStructure.OutputState = TIM_OUTPUT_STATE_ENABLE;
TIM_OCInitStructure.OutputNState = TIM_OUTPUT_NSTATE_ENABLE;
TIM_OCInitStructure.Pulse = Channel_Pulse;
TIM_OCInitStructure.OcPolarity = TIM_OC_POLARITY_LOW;
TIM_OCInitStructure.OcNPolarity = TIM_OCN_POLARITY_HIGH;
TIM_OCInitStructure.OcIdleState = TIM_OC_IDLE_STATE_SET;
TIM_OCInitStructure.OcNIdleState = TIM_OC_IDLE_STATE_RESET;
TIM_Enable(TIMx, ENABLE);
bsp_pwm_init_cmp(pin, TIM_OCInitStructure);
if ((TIMx == TIM1)||(TIMx == TIM8))
{
TIM_EnableCtrlPwmOutputs(TIMx, ENABLE);
}
else
{
TIM_ConfigOc2Preload(TIMx, TIM_OC_PRE_LOAD_ENABLE);
}
}
void bsp_pwm_set(uint8_t pin, uint8_t val)
{
uint32_t PWM_CMP = pwm_config[pin][PWM_CONFIG_CH];
TIM_Module* TIMx = (TIM_Module*)pwm_config[pin][PWM_CONFIG_TIM];
if (PWM_CMP == PWM_CH1)
{
TIM_SetCmp1(TIMx, val);
}
else if (PWM_CMP == PWM_CH2)
{
TIM_SetCmp2(TIMx, val);
}
else if (PWM_CMP == PWM_CH3)
{
TIM_SetCmp3(TIMx, val);
}
else if (PWM_CMP == PWM_CH4)
{
TIM_SetCmp4(TIMx, val);
}
}
#ifndef _BSP_PWM_H_
#define _BSP_PWM_H_
#define BSP_PWM_FULL 255
#define BSP_PWM_EMPTY 0
#define BSP_PWM_1 0
#define BSP_PWM_2 1
#define BSP_PWM_3 2
#define BSP_PWM_4 3
#define BSP_PWM_5 4
#define BSP_PWM_6 5
#define BSP_PWM_7 6
#define BSP_PWM_8 7
#define BSP_PWM_9 8
#define BSP_PWM_10 9
void bsp_pwm_init(uint8_t pin, uint8_t val);
void bsp_pwm_set(uint8_t pin, uint8_t val);
#endif