PWM实验(控制蜂鸣器,风扇,马达)
cortex-A7核实现PWM对蜂鸣器,风扇,马达的控制
1.PWM概念
PWM为一种对模拟信号电平进行数字编码的方法,通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
A7核的芯片有控制PWM的脉冲宽度调制定时器,脉冲即为方波信号,高低电平的变化可产生方波信号。周期为高低电平变化所需要的时间,单位为ms,周期和频率之间是倒数关系,频率即为1s时间可以产生多少个方波信号,单位为Hz,占空比为高低电平占整个周期的百分比。可看下图理解

2.分析扩展板中蜂鸣器,风扇,震动马达对应的电路图,并找到对应的引脚,然后去资源拓展板中查找这几个引脚在资源扩展板上对应的引脚,对应下图可知 马达:TIM16 CH1----->PF6,风扇:TIM1 CH1----->PB13,蜂鸣器:TIM4 CH1----->PB6。


3.分析PWM工作的框图(例:蜂鸣器)

分析上图可知需要用到RCC寄存器(控制相关控制器组使能),GPIO寄存器(设置为复用功能),TIM4,TIM16,TIM1寄存器(产生特定的方波)
4.分析RCC章节(使GPIO组和TIM组时钟使能)
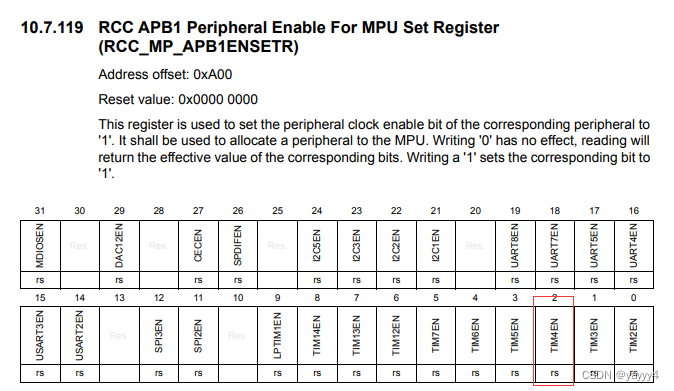
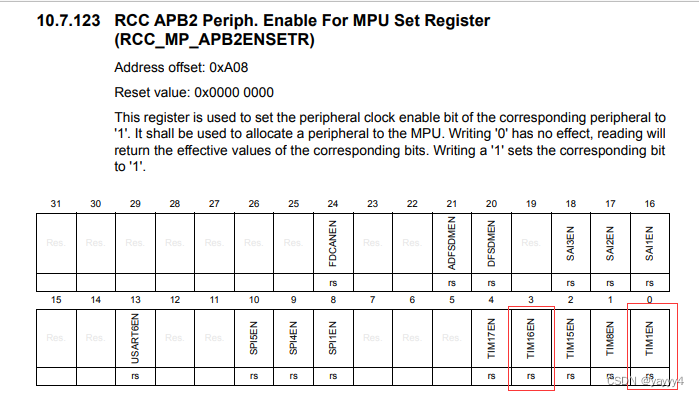
a.分析芯片手册2.5.2章节查看需要控制的寄存器在哪些总线上,RCC,GPIO在AHB4总线上,TIM4在APB1总线上,TIM1和TIM6在APB2总线上。

TIM4:
![]()
TIM1:
![]()
TIM16:
![]()
b.RCC控制GPIO组使能

c.RCC控制TIM组使能
5.GPIO章节分析
a.设置GPIOx_MODER寄存器为复用模式
设置GPIOB_MODER寄存器的第13位到第12位为10(复用功能模式),此为PB6引脚(蜂鸣器)
设置GPIOB_MODER寄存器的第27位到第26位为10(复用功能模式),此为PB13引脚(风扇)
设置GPIOF_MODER寄存器的第13位到第12位为10(复用功能模式),此为PF6引脚(马达)
例:

b.设置GPIOx_AFRL和GPIOx_AFRH使对应复用功能为对应TIM引脚
TIM4_CH1在GPIOx_AFRL寄存器上
TIM1_CH1,TIM16_CH1在GPIOx_AFRH寄存器上
例:

6.分析TIM章节
a.通用计时器概述简析:

b.工作原理

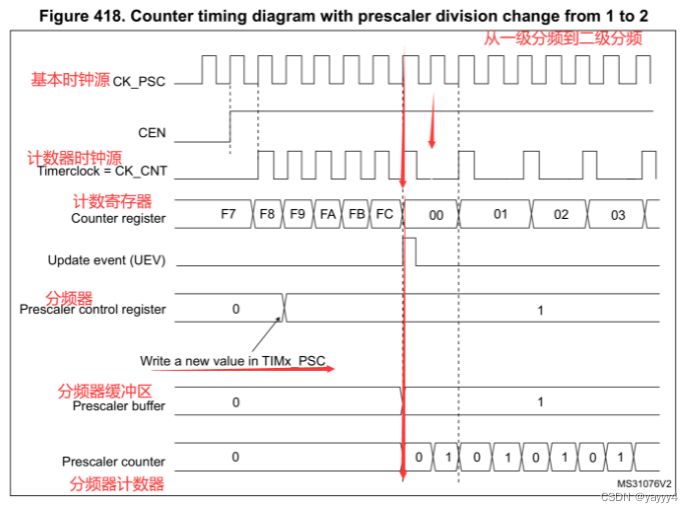
c.递减计数方式(边沿对齐方式)
1)驱动递减计数器时钟信号,每来一个时钟周期
2)技术其中的值减1
3)如果减到值为0,则从递减计数器初值重启开启下一个时钟周期
d.定时器工作原理以及如何产生PWM方波
1)当定时器启动之后,自动重载计数器中的值,会自动加载到递减计数器中
2)递减计数器在CK_CNT时钟驱动下进行工作
3)每来一个时钟周期,递减计数器中的值减1
4)如果减到和比较/捕获寄存器中的值相等之后,电平发生翻转,这样就可以产生PWM方波信息

e.分配器工作原理
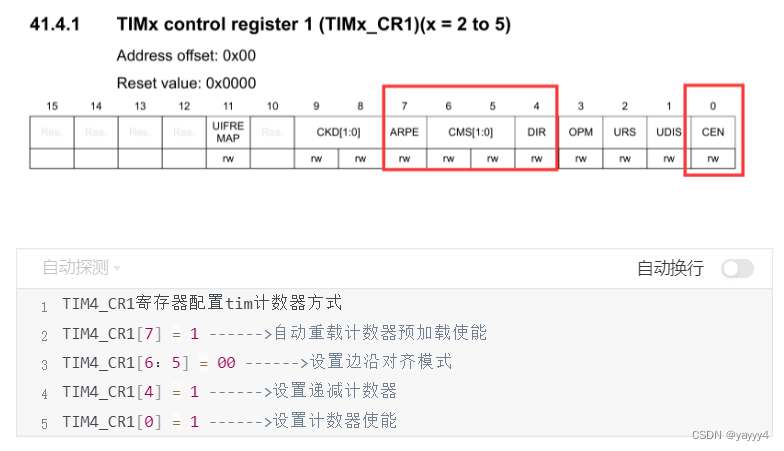
f.TIMx_CR1寄存器配置TIM计数器方式
例(TIM4):

g.分析TIMx_CCMR1寄存器
例(TIM4):


h.分析TIMx_CCER寄存器
例(TIM4):

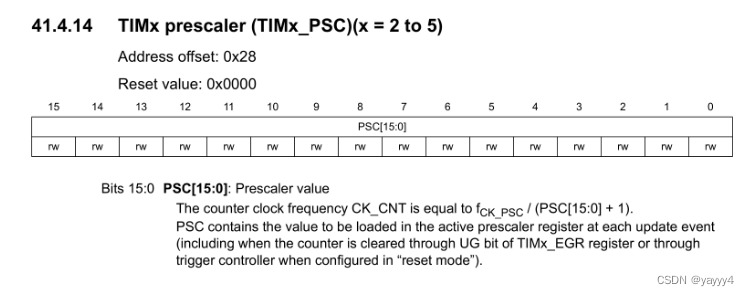
i.分析TIMx_PSC寄存器
例(TIM4):
j.分析TIMx_ARR寄存器
例(TIM4):

k.分析TIMx_CCR1寄存器
例:

l.马达寄存器的设置

m.风扇寄存器的设置
7.代码编写
a.pwm.h文件
#ifndef __PWM__H__
#define __PWM__H__
#include "stm32mp1xx_gpio.h"
#include "stm32mp1xx_rcc.h"
#include "stm32mp1xx_tim.h"
//蜂鸣器初始化 PB6----->TIM4_CH1
void pwm_init();
//马达初始化 PF6----->TIM16_CH1
void motor_init();
//风扇初始化 PE9----->TIM1_CH1
void fan_init();
#endif
b.pwm.c文件
#include "pwm.h"
//蜂鸣器初始化 PB6----->TIM4_CH1
void pwm_init()
{
/*********RCC初始化***********/
//1.使能GPIOB组时钟
RCC->MP_AHB4ENSETR |= (0x1 << 1);
//2.使能TIM4定时器时钟
RCC->MP_APB1ENSETR |= (0x1 << 2);
/*********GPIO初始化*********/
//1.设置PB6引脚为复用功能模式
GPIOB->MODER &= (~(0x3 << 12));
GPIOB->MODER |= (0x2 << 12);
//2.设置PB6引脚复用功能模式TIM4_CH1
GPIOB->AFRL &= (~(0xF << 24));
GPIOB->AFRL |= (0x2 << 24);
/*********TIM4_CH1初始化**********/
//1.设置分配器 系统提供时钟源209MHZ 209
TIM4->PSC = 209-1;
//2.设置PWM方波最终周期
TIM4->ARR = 1000;
//3.设置PWM方波占空比
TIM4->CCR1 = 700;
//4.设置TIM4_CH1通道为PWM1模式
TIM4->CCMR1 &= ~((0x1 << 16) | (0x7 << 4));
TIM4->CCMR1 |= (0x6 << 4);
//5.设置TIM4_CH1通道为预加载时能
TIM4->CCMR1 |= (0x1 << 3);
//6.设置TIM4_CH1通道为输出模式
TIM4->CCMR1 &= ~(0x3);
//7.设置TIM4_CH1通道为输出模式极性高电平
TIM4->CCER &= ~(0x1 << 1);
//8.设置TIM4_CH1通道为比较捕获寄存器输出使能
TIM4->CCER |= (0x1 << 0);
//9.设置TIM4_CH1通道自动重载计数器预加载使能
TIM4->CR1 |= (0x1 << 7);
//10.边沿对齐
TIM4->CR1 &= (~(0x3 << 5));
//11.递减计数
TIM4->CR1 |= (0x1 << 4);
//12.计数器使能
TIM4->CR1 |= (0x1 << 0);
}
//马达初始化 PF6----->TIM16_CH1
void motor_init()
{
/*********RCC初始化***********/
//1.使能GPIOB组时钟
RCC->MP_AHB4ENSETR |= (0x1 << 5);
//2.使能TIM4定时器时钟
RCC->MP_APB2ENSETR |= (0x1 << 3);
/*********GPIO初始化*********/
//1.设置PB6引脚为复用功能模式
GPIOF->MODER &= (~(0x3 << 12));
GPIOF->MODER |= (0x2 << 12);
//2.设置PB6引脚复用功能模式TIM4_CH1
GPIOF->AFRL &= (~(0xF << 24));
GPIOF->AFRL |= (0x1 << 24);
/*********TIM4_CH1初始化**********/
//1.设置分配器 系统提供时钟源209MHZ 209
TIM16->PSC = 209-1;
//2.设置PWM方波最终周期
TIM16->ARR = 1000;
//3.设置PWM方波占空比
TIM16->CCR1 = 700;
//4.设置TIM4_CH1通道为PWM1模式
TIM16->CCMR1 &= ~((0x1 << 16) | (0x7 << 4));
TIM16->CCMR1 |= (0x6 << 4);
//5.设置TIM4_CH1通道为预加载时能
TIM16->CCMR1 |= (0x1 << 3);
//6.设置TIM4_CH1通道为输出模式
TIM16->CCMR1 &= ~(0x3);
//7.设置TIM4_CH1通道为输出模式极性高电平
TIM16->CCER &= ~(0x1 << 1);
//8.设置TIM4_CH1通道为比较捕获寄存器输出使能
TIM16->CCER |= (0x1 << 0);
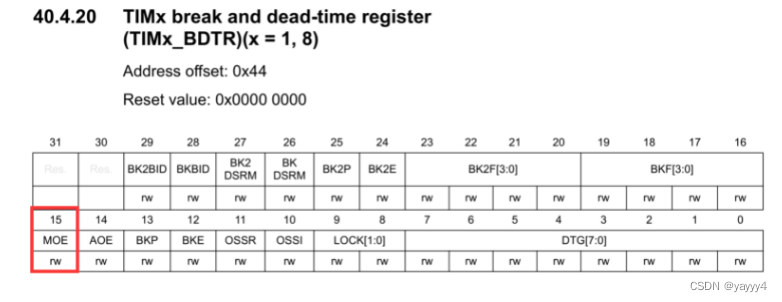
//9.设置TIM4_CH1通道自动重载计数器预加载使能
TIM16->BDTR |=0x1 << 15;
TIM16->CR1 |= (0x1 << 7);
//10.边沿对齐
TIM16->CR1 &= (~(0x3 << 5));
//11.递减计数
TIM16->CR1 |= (0x1 << 4);
//12.计数器使能
TIM16->CR1 |= (0x1 << 0);
}
//风扇初始化 PE9----->TIM1_CH1
void fan_init()
{
/*********RCC初始化***********/
//1.使能GPIOE组时钟
RCC->MP_AHB4ENSETR |= (0x1 << 4);
//2.使能TIM4定时器时钟
RCC->MP_APB2ENSETR |= (0x1 << 0);
/*********GPIO初始化*********/
//1.设置PB6引脚为复用功能模式
GPIOE->MODER &= (~(0x3 << 18));
GPIOE->MODER |= (0x2 << 18);
//2.设置PB6引脚复用功能模式TIM4_CH1
GPIOE->AFRH &= (~(0xF << 4));
GPIOE->AFRH |= (0x1 << 4);
/*********TIM4_CH1初始化**********/
//1.设置分配器 系统提供时钟源209MHZ 209
TIM1->PSC = 209-1;
//2.设置PWM方波最终周期
TIM1->ARR = 1000;
//3.设置PWM方波占空比
TIM1->CCR1 = 700;
//4.设置TIM4_CH1通道为PWM1模式
TIM1->CCMR1 &= ~((0x1 << 16) | (0x7 << 4));
TIM1->CCMR1 |= (0x6 << 4);
//5.设置TIM4_CH1通道为预加载时能
TIM1->CCMR1 |= (0x1 << 3);
//6.设置TIM4_CH1通道为输出模式
TIM1->CCMR1 &= ~(0x3);
//7.设置TIM4_CH1通道为输出模式极性高电平
TIM1->CCER &= ~(0x1 << 1);
//8.设置TIM4_CH1通道为比较捕获寄存器输出使能
TIM1->CCER |= (0x1 << 0);
//9.设置TIM4_CH1通道自动重载计数器预加载使能
TIM1->BDTR |=0x1 << 15;
TIM1->CR1 |= (0x1 << 7);
//10.边沿对齐
TIM1->CR1 &= (~(0x3 << 5));
//11.递减计数
TIM1->CR1 |= (0x1 << 4);
//12.计数器使能
TIM1->CR1 |= (0x1 << 0);
}
main.c文件
#include "pwm.h"
extern void printf(const char *fmt, ...);
void delay_ms(int ms)
{
int i,j;
for(i = 0; i < ms;i++)
for (j = 0; j < 1800; j++);
}
int main()
{
pwm_init();
fan_init();
motor_init();
while(1)
{
}
return 0;
}