OpenCV-Python小应用(六):车道线检测
OpenCV-Python小应用(六):车道线检测
- 前言
- 前提条件
- 实验环境
- 基于霍夫变换的车道线检测
- 参考文献
前言
- 本文是个人使用OpenCV-Python的应用案例,由于水平有限,难免出现错漏,敬请批评改正。
- 更多精彩内容,可点击进入OpenCV-Python小应用专栏或我的个人主页查看
前提条件
- 熟悉Python
实验环境
- Python 3.6.13 (面向对象的高级语言)
- OpenCV 3.4.10(python第三方库)
pip3 install opencv-python==3.4.10.37
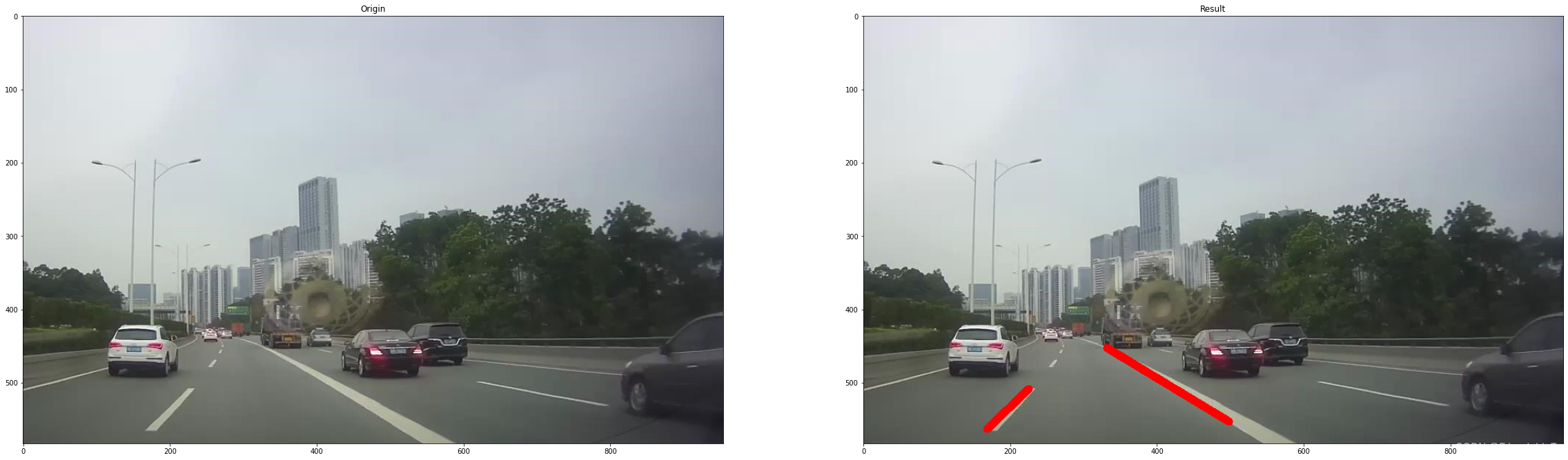
基于霍夫变换的车道线检测
- 主要思路:利用霍夫变换将图片中的所有直线找出,并通过区域坐标过滤掉不是车道线的直线。这属于传统算法的范畴,有一定的局限性。
- 霍夫变换相关知识点,可查阅OpenCV-Python快速入门(十五):霍夫变换
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取图片
img = cv2.imread('lane.jpg')
# 灰度图
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 边缘检测
edges = cv2.Canny(gray,50,150,apertureSize = 3)
# BGR -> RGB
img_RGB=cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
img_Show=img_RGB.copy()
# 概率霍夫变换
'''
lines =cv2.HoughLinesP(image, rho, theta, threshold, minLineLength, maxLineGap)
参数:
image 是输入图像,即源图像,必须为 8 位的单通道二值图像。
对于其他类型的图像,在进行霍夫变换之前,需要将其修改为这个指定的格式。
rho 为以像素为单位的距离 r 的精度。一般情况下,使用的精度是 1。
theta 是角度𝜃的精度。一般情况下,使用的精度是 np.pi/180,表示要搜索可能的角度。
threshold 是阈值。该值越小,判定出的直线越多;值越大,判定出的直线就越少。
minLineLength 用来控制“接受直线的最小长度”的值,默认值为 0。
maxLineGap 用来控制接受共线线段之间的最小间隔,即在一条线中两点的最大间隔。
如果两点间的间隔超过了参数 maxLineGap 的值,就认为这两点不在一条线上。默认值为 0。
返回值:
lines 是由 numpy.ndarray 类型的元素构成的,其中每个元素都是一对浮点数,表示检测到的直线的参数,即(r, θ)。
'''
lines = cv2.HoughLinesP(edges,1,np.pi/180,1,minLineLength=55,maxLineGap=9)
for line in lines:
x1,y1,x2,y2 = line[0]
if x1 < 150 or x1 > 500 or x2 > 500 or y2 < 500: # 过滤多余的直线
continue
# print(x1,y1,x2,y2)
cv2.line(img_RGB,(x1,y1),(x2,y2),(255,0,0),10)
# 显示图片
plt.figure(figsize=(40, 40))
plt.subplot(121)
plt.title("Origin")
plt.imshow(img_Show)
plt.subplot(122)
plt.title("Result")
plt.imshow(img_RGB)
plt.show()
参考文献
[1] https://opencv.org/
[2] 李立宗. OpenCV轻松入门:面向Python. 北京: 电子工业出版社,2019
- 更多精彩内容,可点击进入OpenCV-Python小应用专栏或我的个人主页查看