[AutoSAR 存储] 汽车智能座舱的存储需求
公知及经验整理,原创保护,禁止转载。
专栏 《AutoSAR 存储》
<<<< 返回总目录 <<<<

1 智能座舱的发展:
1.1 发展历史
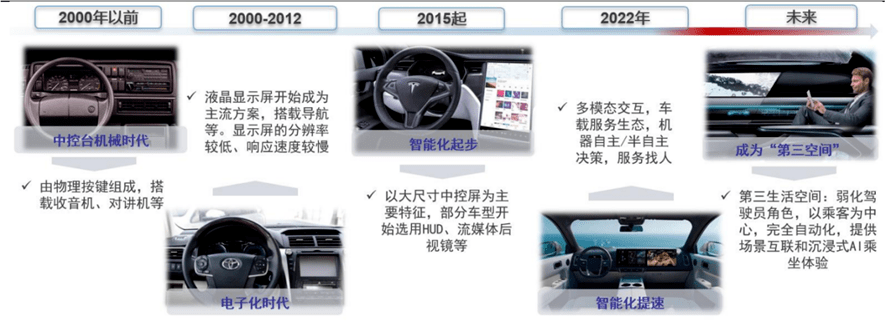
车辆信息娱乐系统的发展可以分为三个阶段。
- 机械化阶段
在上世纪90年代,车辆仪表盘和内部设备主要是机械式的,在操作上需要大量的物理按键。信息存储方面,只需要使用NOR FLASH存储简单的行驶里程、收音设置等数据,存储需求都不会超过100MB。
- 电子化阶段
进入2000年至2015年, 电子技术开始进入车辆座舱。中控液晶显示屏、车载导航、蓝牙、媒体播放设备等简易电子设备被广泛使用。此时,存储容量需求逐渐变大,操作系统需要存储空间。虽然在这个阶段车内的人机交互不太多,而且没有太多应用软件可以装载,但存储容量基本上已经达到了16GB, 存储器以TF 居多。
- 智能化时代
从2015年开始,随着大尺寸中控屏的引入,智能化进程迈出了重要一步。液晶仪表、中控屏、抬头式显示器、视觉感知、语音交互等装置通过域控制器集成布置于车辆座舱内,以满足驾车者和乘客更加舒适、智能化的驾乘体验需求。此时,车辆信息娱乐系统的储存需求变得越来越重要,因为车辆需要存储各种应用程序以及大量的多媒体数据,例如音乐、视频、图片等等。因此现代车辆的储存容量已经达到了数百GB级别,以满足车辆信息娱乐系统的不断增长的需求,存储器 eMMC 一度成为主角。
1.2 发展趋势
ADAS(Advanced Driving Assistance System,又称高级驾驶辅助系统)和富有功能的驾驶舱是当前半导体产品增长的主要推动力,远远高于全自动驾驶汽车。汽车内部/驾驶舱以及乘客体验(IVE,In-Vehicle Experience)已成为影响消费者购买决策和汽车厂商(OEM)品牌特性的关键因素。
消费者期望获得更好的联网体验,以便更轻松地获取信息,享受类似智能手机的无缝使用体验,并为其喜爱的所有智能手机应用程序提供本地车载支持。
越来越多、越来越大的高分辨率显示屏需支持这些应用程序,提供身临其境的体验。汽车制造商意识到,人们的关注点从实际驾驶体验转向基于个人品味、娱乐和工作效率的体验。自动驾驶汽车的未来更注重信息和乘客体验丰富的驾驶舱,因此,车内体验的创新将继续增长。
1)车载信息娱乐系统正与仪表盘集成,功能安全愈发重要。
当今的汽车对快速存储并处理大量数据的要求越来越高。汽车厂商一直面临着整合处理能力、保证数字系统流畅运行和成本竞争等压力。而现在,让人意想不到的新趋势出现了。车载信息娱乐系统,其引人入胜的高分辨率屏幕和功能越来越像智能手机了,而它的功能不再只是为了好玩。设计人员将车载信息娱乐系统与仪表盘集成,以实现符合功能安全要求的更为关键的系统。
这样集成主要是为了降低成本和简化架构,以加速实现创新。尽管这种集成是有益的,但也要考虑功能安全的要求。仪表盘中的某些信息用于提醒驾驶员注意车辆功能,其中一部分信息可能会对车辆和乘客安全产生影响,因此需要符合严格的合规要求。
2)集中式存储在交互式座舱中变得越来越重要
VI系统和仪表盘架构通常是分开设计的。虽然现有的系统在提升用户体验方面已做出了努力,但仍无法满足消费者对创新的期望,如类似于智能手机的体验。
集中式存储有助于实现不同功能系统之间的数据共享,这也是创造交互式和个性化用户体验的基础,而这正是消费者期待的车内体验。
2 智能座舱的存储芯片的要求
文献[1]
2.1. 安全可靠性的要求

特斯拉曾经因为内存问题进行了一次大规模召回,召回数量达到约13.5万辆。据特斯拉公司表示,这是因为车辆中的8GB eMMC内存达到使用寿命后,相应的控制器会失效,从而导致后视、除霜设定、转向灯调整等功能无法正常使用。一般而言,这一问题可能会在车辆使用五到六年后开始出现。为此特斯拉提供免费更换64GB eMMC内存的解决方案。
智能座舱域控制的存储芯片必须要达到车规级要求
汽车内部的域控制存储芯片需要考虑很多因素,其中最重要的是保障存储的安全性。这些芯片存储着非常重要的车身控制信息。因此,设计者需要采用非常高的安全标准来保证存储的可靠性。
首先,这些存储器需要能够在高温运行条件下保持正常工作。普通的电子产品只需要在 -10℃ 到 50℃ 的温度范围内正常工作,而汽车的外部环境温度变化非常大。例如,后视镜的温度在太阳长时间照射后可以达到 90-100 度左右。因此,对于存储器的宽温控制性能有很高的要求。不同位置的存储芯片的要求也有所不同。如果只是用于娱乐,不涉及安全应用等数据,要求-40℃ 到 85℃ 温度范围内正常工作。但是,如果用于智能座舱的域控制存储芯片,温度范围必须至少达到-40℃ 到 105℃,以确保在极端低温和高温环境下存储性能稳定,故障率为0。
其次,信号的可靠性和完整性也是至关重要的。在许多驾驶环境下,会经常有电磁波等环境干扰,这会影响数据的可靠性。因此,在设计上,需要考虑存储器的抗干扰性能。除此之外,在关乎整车行驶安全性的部分,车载存储器在响应速度、抗振动、可靠性、纠错机制、调试机制、可回溯性以及数据存储的高度稳定性等方面,相比消费类产品来说都要提高很多个量级。
2.2. 读取速度要快
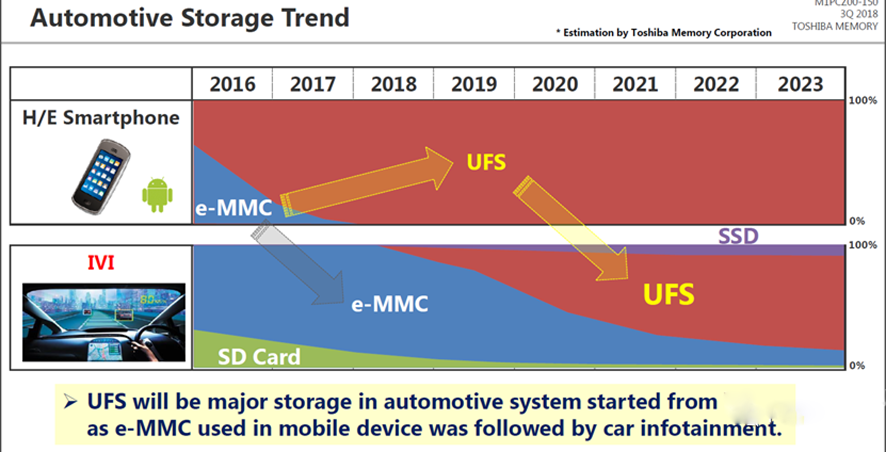
车载导航系统在技术和容量方面的发展趋势与手机系统基本相似。最开始的车载导航系统需要使用外接的SD卡存储地图,每次更新地图都需要到4S店支付费用。随着技术的不断进步,车载导航系统开始采用与手机系统同样的内部存储芯片接口,从eMMC到UFS接口的转变也将在智能座舱存储芯片上应用。这样的趋势也是因为UFS接口相较于eMMC接口更为先进可靠,能够更好地满足车载导航系统的需求。
在数据存储的接口方面,车载通讯的接口朝着速度更快的接口协议进行发展,目前主流的车载存储采用的是eMMC5.1和UFS2.1的接口协议。
目前在汽车前装市场领域,应用最大的是e.MMC,主要应用在TBox网端和ADAS上,有些中低端车载娱乐系统也会使用8-32GB的e.MMC。现在手机的接口都从eMMC到UFS接口了,智能座舱存储芯片的接口也会从eMMC接口变更到UFS接口,高端车型也有可能采用PCIe SSD。
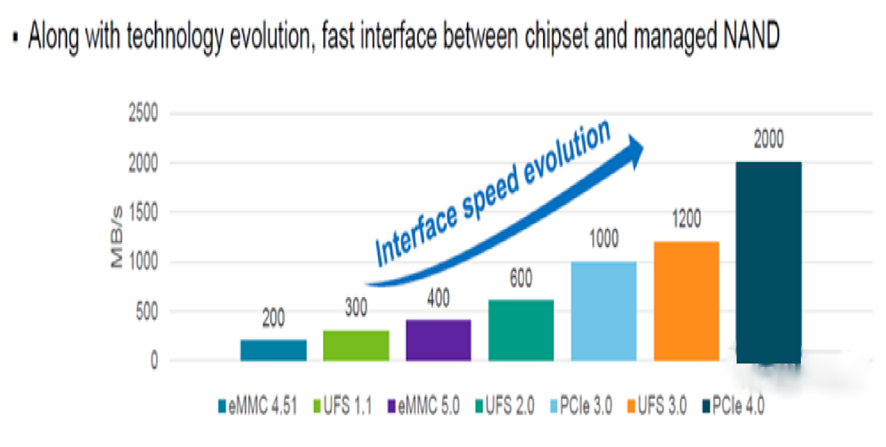
UFS和eMMC接口内核都使用NAND闪存,但它们使用不同的协议进行控制。相比之下,eMMC的最大通信速率为400MB/s,而使用UFS接口时,最大通信速率可达1160MB/s。通信速度对车机的开机时间、软件加载时间等直接产生影响,因此,为了满足用户对启动速度和读写速度更快的需求,座舱领域的存储至少需要支持UFS2.1。高通第三代8155座舱SoC已经支持了UFS接口。
所以要满足读写速度快的诉求,座舱领域的存储至少要满足UFS2.1。
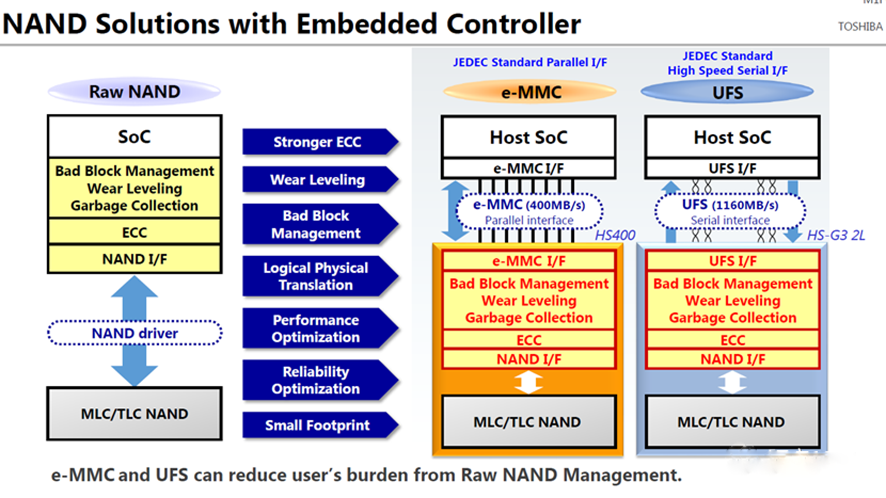
上图就是UFS接口和eMMC接口的区别,内核都是NAND flash,在控制接口不同协议,通讯的速度eMMC 最大速度是400MB/s,而UFS 接口通讯最大速度是1160MB/s。
软件速度越快,就有越大的优势。例如,液晶仪表需要在最快的时间内向用户输出界面。当前赛普拉斯的平台可以在0.7秒内实现开机,而中控导航需要在用户点火倒车后的1.5秒内向用户输出倒车图像。除了软件策略的优化,快速读取数据也是至关重要的。
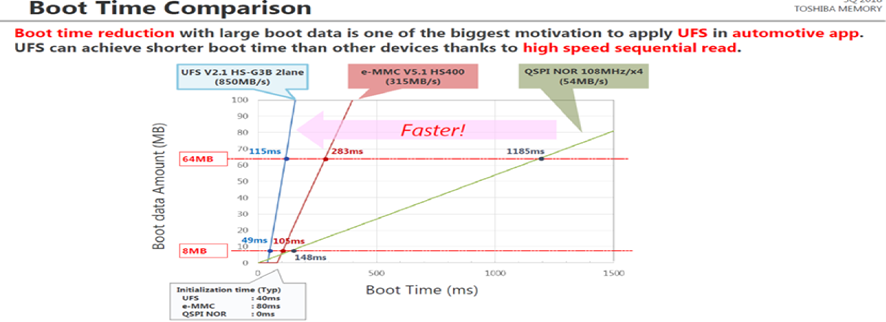
UF2.1是一种高速通讯协议,双通道(Lane)传输速度达到了惊人的850MB/s,比起常用的QSPI NOR FLASH的传输速度54MB/s,快了10倍以上。使用UF2.1协议启动64MB的boot区域数据,只需短短的115ms(即0.1秒),而使用NOR FLASH则需要长达1185ms(即1.1秒)的时间。这个巨大的速度提升让用户体验得到了极致的改善,尤其是在开机速度方面。此外,当用户存储文件或音视频时,也会感受到更好的体验。比如,如果用户录制了一段很大的视频,如果保存需要漫长的等待时间,这对用户的体验将会产生很大的影响。因此,UF2.1协议的高速传输能力有望提升用户体验。
在数据存储的接口方面,车载通讯的接口朝着速度更快的接口协议进行发展,目前主流的车载存储采用的是eMMC5.1和UFS2.1的接口协议。
上图中的速度是单通道的速度, 对于 UFS 和 PCIE 可以支持多个通道, 对应的速度就是多倍数。虽然PCIE 4.0 单通道带宽是 2000MB/s,个人电脑的 SSD 是 4 通道,所以极限速度是 8000MB/s. 而 UFS 常见的是 2 通道, 所以实际产品速度是上图两倍。
2.3. 可灵活配置SLC存储的需求
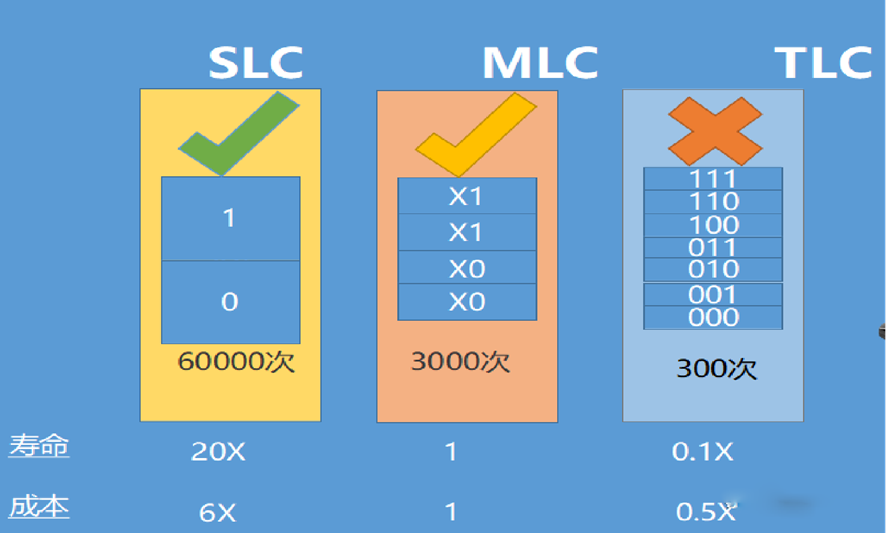
MMC存储器是由NAND FLASH构成。因此,像NAND FLASH一样,EMMC存储器也会面临SLC、MLC、TLC等不同存储级别的挑战,其中擦除次数受限是主要的问题。SLC存储器具有60000次的可擦写寿命,但其存储容量有限,大容量的SLC存储器价格昂贵。目前,大容量EMMC存储器主要采用TLC存储技术。
智能座舱需要录制高清视频,以1080P60为例,每秒数据量为148.5M,格式为RGB888,但摄像头信号一般为YUV4:2:2,每秒数据量为100M。录制一分钟的视频需6GB存储空间,录制一小时的视频需360GB存储空间。这些数据都是原始数据,若压缩格式为H.264,压缩比例为60:1,那么一小时视频占据6GB存储空间。
若给行车记录仪32GB储存空间进行录制,需要进行强制覆盖,无法达到寿命要求。解决方法是将32GB的MLC存储空间配置为16GB的SLC格式,虽然存储空间减半,但擦写次数可达60000次,可满足17.86年使用寿命,同时也可以支持类似行车记录仪等大数据的读写存储需求。
2.4. 更高容量的需求
智能座舱域控制对于存储容量的要求:
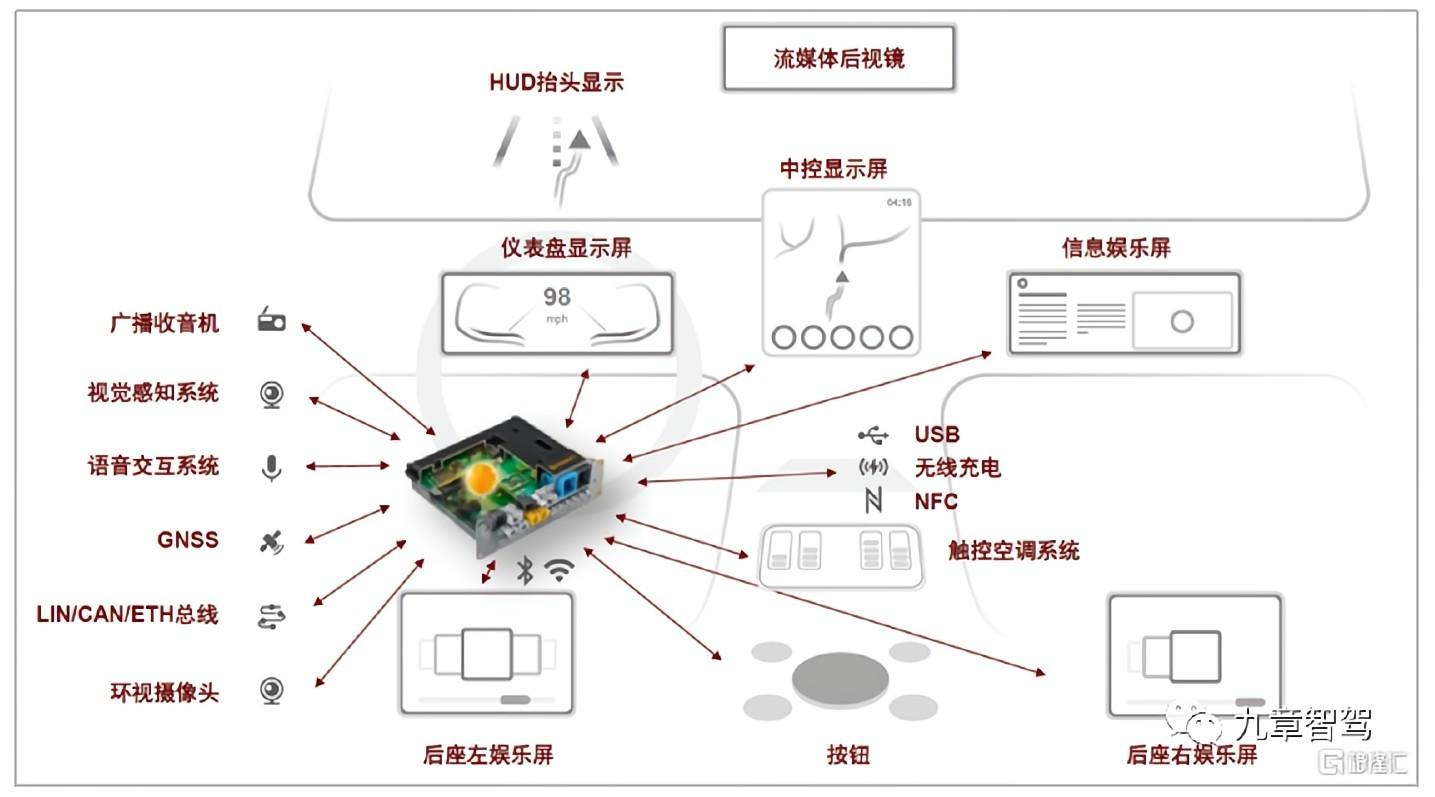
可以看到,智能座舱域控制的存储都非常庞大,要处理非常多的事项,包括人机交互语音、人脸、手势等各种信息的处理。对于存储芯片的要求,已经提到了存储空间要大的诉求.

来源:佐思汽研《2022年车载存储芯片行业研究报告》
新上市车型智能座舱存储能力愈发强大:
2022年新上市的理想L9标配两颗高通骁龙8155芯片,同时具备24G内存和256GB高速存储能力,共同组成强劲的计算平台。[2]
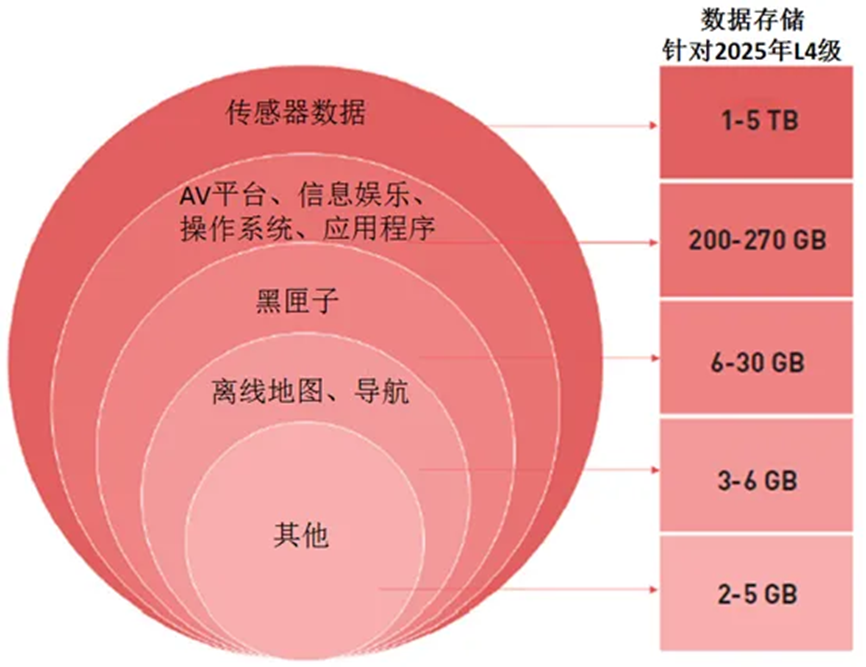
图 2025 无人驾驶汽车存储容量需求
来源:Counterpoint
车辆配备了一系列先进的视觉传感器,包括RGB图像、全景光线追踪和景深深度信息数据等,这使其具备了制作AR、VR和MR影像的能力。一旦视觉处理能力得到开发,结合智能汽车的高清显示屏和虚拟HUD显示装置,这将成为最具互动性的智能终端。无论是本地存储还是云端存储,都需要大量存储空间。
在这波智能座舱的浪潮中,存储芯片的容量大小至关重要,最初都是依赖于存储空间的突破。只有产品的存储空间足够的情况下,才能装载更大的系统软件和应用软件,并存储更多的数据用于生产与服务。
参考
| 1 | 智能座舱数据存储技术浅析 |
| 2 | 车载存储芯片研究:百舸争流,国产化势在必行 |
