机器视觉系统选型-高图像精度
图像精度
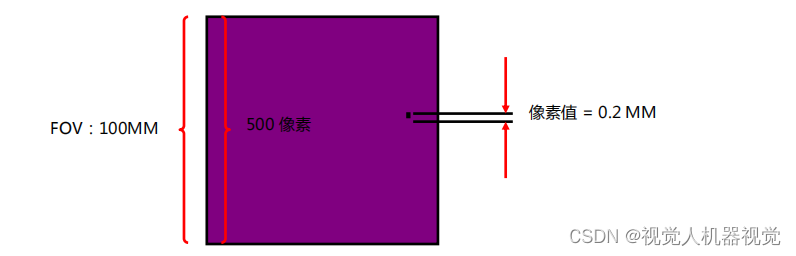
X方向系统精度(X方向象素值)= 视野范围(X方向)÷ CCD芯片象素数量(X方向)
Y方向系统精度(Y方向象素值)= 视野范围(Y方向÷ CCD芯片象素数量(Y方向)
该指标取决于,相机分辨率及视野(FOV)
注意点:图像精度需要分析边缘锐度及算法精度稳定性
图像精度
X方向系统精度(X方向象素值)= 视野范围(X方向)÷ CCD芯片象素数量(X方向)
Y方向系统精度(Y方向象素值)= 视野范围(Y方向÷ CCD芯片象素数量(Y方向)
该指标取决于,相机分辨率及视野(FOV)
注意点:图像精度需要分析边缘锐度及算法精度稳定性