Baumer工业相机堡盟工业相机如何通过NEOAPI SDK获取相机当前实时帧率(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK获取相机当前实时帧率(C#)
- Baumer工业相机
- Baumer工业相机的帧率的技术背景
- Baumer工业相机的帧率获取方式
- CameraExplorer如何查看相机帧率信息
- 在NEOAPI SDK里通过函数获取相机帧率
- Baumer工业相机通过NEOAPI SDK获取帧率的优势
- Baumer工业相机通过NEOAPISDK获取帧率的行业应用
Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有快速数据传输、低功耗、易于集成以及高度可扩展性等特点。
Baumer工业相机NEOAPI SDK是用于Baumer工业相机的一款最新的软件开发工具包(SDK)。它为开发人员提供了一系列API和工具,用于与Baumer工业相机进行通信和控制,控制方式极为便捷类似Halcon的相机助手类控制方式。
Baumer工业相机的Camera Explorer软件功能强大,内容丰富,通过该软件可以有效的获取相机相关的全部信息,在对于相机检测项目的开发中,有时需要获取相机中图像Buffer信息和相关的数据流信息,而Camera Explorer软件可以有效的显示相关的信息。
Baumer工业相机的帧率的技术背景
工业相机的帧率是指相机每秒捕获的单个帧或图像的数量。
帧率越高,意味着摄像机每秒能够捕获更多的图像,从而使视频更流畅、更细腻。
工业相机的帧率取决于各种技术因素,如图像传感器技术、相机的处理速度,以及用于传输数据的连接方法。
图像传感器技术: 摄像机的帧率是由图像传感器读出图像像素数据的速度决定的。与CCD传感器相比,CMOS传感器提供更快的帧率,因为它们可以无损地读出像素。
处理速度:工业相机的帧率会受到相机处理能力的影响。较高的处理速度能使数据读出和传输更快,从而获得更高的帧率。
连接方法: 工业相机的帧率还取决于用于传输数据的连接方法。USB 3.0和千兆以太网提供更快的数据传输率,通常用于工业相机以实现更高的帧率。
总之,工业相机帧率的技术背景由图像传感器技术、处理速度和用于传输数据的连接方法决定。
Baumer工业相机的帧率获取方式
Baumer工业相机帧率的计算方式如下所示:
-
确定相机的输出格式和分辨率,例如 1920*1080。
-
然后查找相机的技术规格表,了解它的最大帧速率。最大帧速率是指相机能够捕获的每秒图像帧数的最大值。例如,相机的最大帧速率为 60 帧每秒。
-
接下来,通过检查相机检测到考虑的接口,从相机中获取图像帧并计算每秒钟传输的帧数。
以通过USB3.0接口连接的标准分辨率相机为例,可以使用以下公式计算帧率:
实时帧数 = 最大帧速率 * 传输带宽利用率
传输带宽利用率 = (像素位深度 * 帧高 * 帧宽 * 实际传输速率) / 8
例如,如果选择了 8 位的像素位深度,相机输出的图像帧大小为 1920x1080 像素,并且实际传输速率为 300 MB/s,则传输带宽利用率为:
(8 * 1080 * 1920 * 300) / 8 = 150.7 MB/s
如果相机的最大帧速率为 60 帧每秒,则实时帧率为:
实时帧数 = 60 * 150.7 / 300 = 30 帧每秒
因此,这个相机在这种配置下的实时帧率为 30 帧每秒。
前面有技术博客可以使用FrameID每秒计算对应的差值,从而计算相机的实时帧率:
Baumer工业相机堡盟工业相机如何通过BGAPISDK里的工具函数来计算工业相机的实时帧率(C#)
CameraExplorer如何查看相机帧率信息
Baumer工业相机 的相机软件Camera Explorer可以可视化便捷地进行查看相机图像的相关信息
首先,双击进入相机界面
然后选择相机页面中左上角标题菜单栏中的Widgets,并选择其中的Image/Buffer Info。

然后在软件右侧出现相机图像通讯相关信息,如下所示:
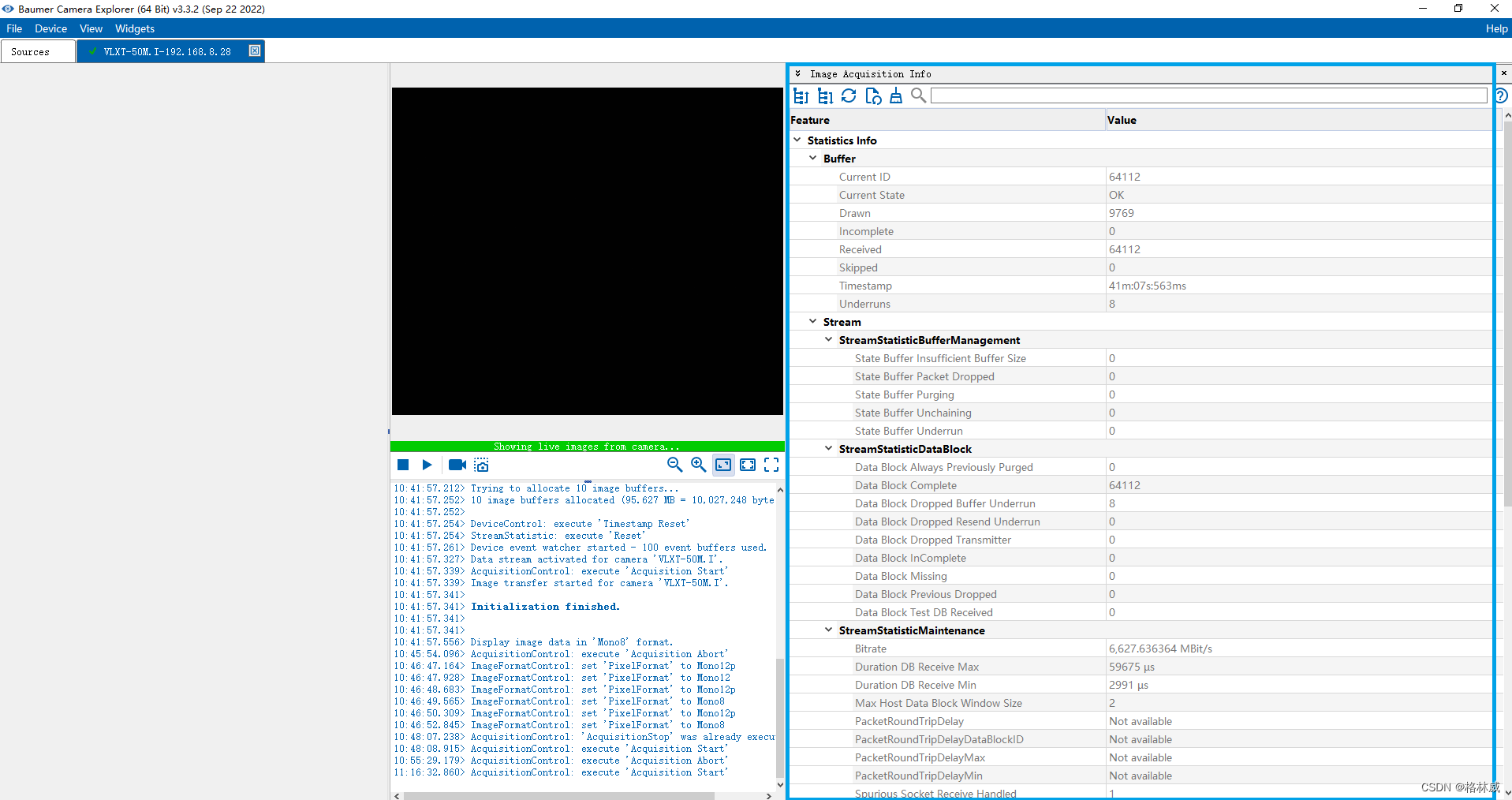
图像参数中Throughout可以查看相机当前的帧率。如下图所示:

在NEOAPI SDK里通过函数获取相机帧率
在相机连接后构建线程显示帧率,C#调用代码如下所示:
ShowFrame_hThread1 = new Thread((ThreadStart)delegate() { SetShowFrame(curDevice); });
ShowFrame_hThread1.IsBackground = true;
ShowFrame_hThread1.Start();Thread ShowFrame_hThread1;
int CameraFrameID = 0;
private void SetShowFrame(NeoAPI.Cam CamInstance)
{try{ bool m_bRun0 = true;while (m_bRun0){//通过回调函数里的FrameID计算相机帧率并显示if (CameraFrameID > 0){int CurFrameID1 = CameraFrameID;Thread.Sleep(1000);int CurFrameID2 = CameraFrameID;int CalFrameID = (CurFrameID2 - CurFrameID1) * 1;//this.CalFrameDisplay.Text = CalFrameID.ToString();// 查询对应功能ThroughputNeoAPI.Feature ThroughputFeature;camera.GetRuntimeInfoList().TryGetValue("Throughput", out ThroughputFeature);// 获取数据通量Throughput信息double ThroughputFdata = ThroughputFeature.ValueDouble;// 显示当前相机对应帧率this.CalFrameDisplay.Text = ThroughputFdata.ToString();} }}catch (Exception ex1){OnNotifyShowRecieveMsg(ex1.Message);}
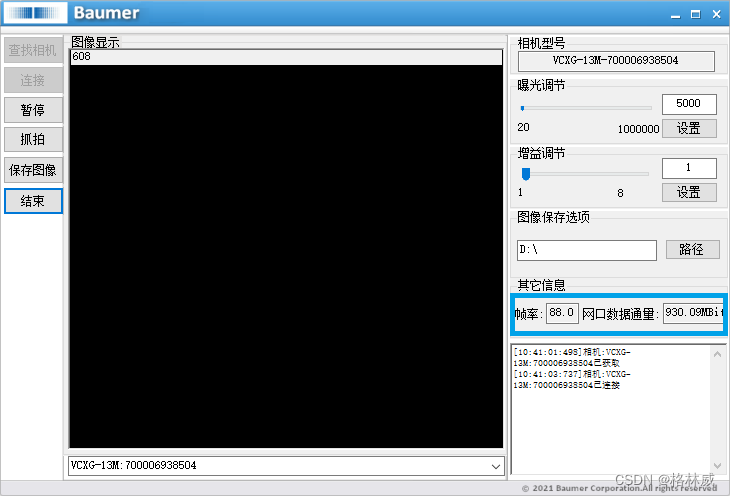
}测试显示帧率结果如下所示:
Baumer工业相机通过NEOAPI SDK获取帧率的优势
Baumer工业相机通过NEOAPISDK获取帧率的优势主要包括:
高效性能:使用NEOAPISDK可以有效地控制和管理Baumer工业相机的帧率,对于需要高帧率的应用环境,比如高速检测或者实时监控非常有帮助。
兼容性强:NEOAPISDK提供了用户友好的接口,兼容各种编程语言,使得开发者可以便捷地集成这个SDK到他们的系统或应用中。
精确控制:通过NEOAPISDK,开发者可以精确地控制每一帧的获取和处理,这对于需要精确控制的应用环境,如精密制造或科学研究非常重要。
稳定可靠:Baumer工业相机配合NEOAPISDK可以长时间稳定运行,支持连续抓取和处理大量的图像数据,对于需要长时间运行的工业应用尤其重要
Baumer工业相机通过NEOAPISDK获取帧率的行业应用
Baumer工业相机通过NEOAPISDK获取帧率,其应用广泛涵盖了多个行业,这些包括但不限于:
制造业:在自动化生产线中,这种相机可以进行高帧率的视觉检测,检测产品质量问题或生产线的故障。
机器视觉:在自动化设备的构建中,比如机器人,这种相机可以进行高速的图像采集和处理,帮助机器进行准确的识别和操作。
交通监控:在交通监控中,如车牌识别,行人检测等,高帧率相机可以提供流畅且清晰的图像,保证识别的准确性。
医疗设备:在高级医疗设备中,如手术机器人,这种相机可以快速捕捉手术现场的详细图像,帮助医生进行精确的操作。
所以,无论是对于显微镜观察、流水线检查、外科手术辅助,还是交通监控,利用NEOAPISDK进行帧率控制的Baumer工业相机都能提供极高的性能表现