当前位置: 首页 > news >正文 3D视觉-相机选用的原则 news 来源:原创 2024/5/20 1:29:41 鉴于不同技术方案都有其适用的场景,立体相机的选型讲究的原则为“先看用途,再看场景,终评精度”,合适的立体相机在方案中可以起到事半功倍的效果。从用途上来进行划分,三维视觉方案主要应用在两个方向:测量,定位。从场景上来划分主要为:动态(指物体在拍摄过程中始终处于运动状态,如平移、旋转),静态(指物体在拍摄过程中处于静止或者慢速平移运动)。依据这两个维度,选择合适的立体相机方案,最终依据测量精度和视野范围的要求选择合适的系统即可。 相关文章: STM32 基础知识(探索者开发板)--135讲 ADC转换 金和OA C6 UploadFileEditorSave.aspx 文件上传漏洞复现 Elasticsearch 优化常用思路 防火墙未开端口导致zookeeper集群异常,kafka起不来 Unity检测地面坡度丨人物上坡检测 【elfboard linux开发板】7.i2C工具应用与aht20温湿度寄存器读取 Qt编写的exe程序上添加程序信息 介绍Docker的基本概念和优势,以及在应用程序开发中的实际应用 从Windows 1.0到Windows 10的旅程:探索Windows系统的起源和第一个版本特点 二叉树的后序遍历,力扣 Spring Boot快速搭建一个简易商城项目【完成登录功能且优化】 Axure医疗-住院板块,住院患者原型预览,新增医护人员原型预览,新增病房原型预览,选择床位原型预览,主治医生原型预览,主治医生医嘱原型预览 Mybaits-plus快速入门 大学生必备的15个网站,大学生考试报名,大学生自学网站! SortedMap、NavigableMap C++类中的特殊成员函数 eclipse(luna)创建web工程 MySQL几个简单SQL的优化 Mysql优化 Netty 框架总结「ChannelHandler 及 EventLoop」 PAT A1120 react-native 安卓真机环境搭建 React的组件模式 Redux系列x:源码分析 Shadow DOM 内部构造及如何构建独立组件 笨办法学C 练习34:动态数组 开发基于以太坊智能合约的DApp 设计模式走一遍---观察者模式 使用docker-compose进行多节点部署 微服务框架lagom 小程序01:wepy框架整合iview webapp UI 协程 这几个编码小技巧将令你 PHP 代码更加简洁 浅谈sql中的in与not in,exists与not exists的区别 LeetCode解法汇总1410. HTML 实体解析器 你们这样子,耽误我的工作进度怎么办? (JSP)EL——优化登录界面,获取对象,获取数据 (附源码)springboot工单管理系统 毕业设计 964158 (九)One-Wire总线-DS18B20 (实战)静默dbca安装创建数据库 --参数说明+举例 (四)TensorRT | 基于 GPU 端的 Python 推理 (一)Neo4j下载安装以及初次使用 (转) 深度模型优化性能 调参 (最优化理论与方法)第二章最优化所需基础知识-第三节:重要凸集举例 .bat批处理(二):%0 %1——给批处理脚本传递参数 .net 4.0 A potentially dangerous Request.Form value was detected from the client 的解决方案 .NET/C# 反射的的性能数据,以及高性能开发建议(反射获取 Attribute 和反射调用方法) .NET连接MongoDB数据库实例教程 .NET使用HttpClient以multipart/form-data形式post上传文件及其相关参数 .NET委托:一个关于C#的睡前故事 @基于大模型的旅游路线推荐方案 [【JSON2WEB】 13 基于REST2SQL 和 Amis 的 SQL 查询分析器 [ASP.NET MVC]如何定制Numeric属性/字段验证消息 [Assignment] C++1 [BUUCTF]-PWN:wustctf2020_number_game解析(补码,整数漏洞)
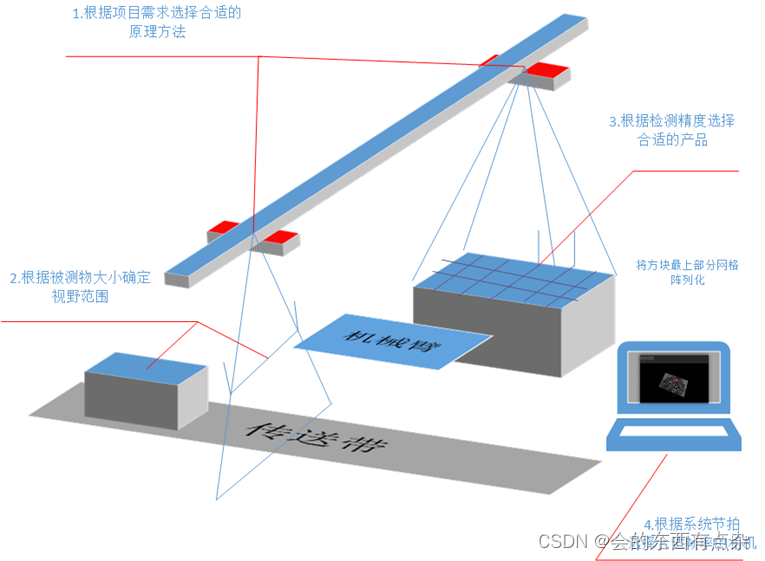
鉴于不同技术方案都有其适用的场景,立体相机的选型讲究的原则为“先看用途,再看场景,终评精度”,合适的立体相机在方案中可以起到事半功倍的效果。从用途上来进行划分,三维视觉方案主要应用在两个方向:测量,定位。从场景上来划分主要为:动态(指物体在拍摄过程中始终处于运动状态,如平移、旋转),静态(指物体在拍摄过程中处于静止或者慢速平移运动)。依据这两个维度,选择合适的立体相机方案,最终依据测量精度和视野范围的要求选择合适的系统即可。 相关文章: STM32 基础知识(探索者开发板)--135讲 ADC转换 金和OA C6 UploadFileEditorSave.aspx 文件上传漏洞复现 Elasticsearch 优化常用思路 防火墙未开端口导致zookeeper集群异常,kafka起不来 Unity检测地面坡度丨人物上坡检测 【elfboard linux开发板】7.i2C工具应用与aht20温湿度寄存器读取 Qt编写的exe程序上添加程序信息 介绍Docker的基本概念和优势,以及在应用程序开发中的实际应用 从Windows 1.0到Windows 10的旅程:探索Windows系统的起源和第一个版本特点 二叉树的后序遍历,力扣 Spring Boot快速搭建一个简易商城项目【完成登录功能且优化】 Axure医疗-住院板块,住院患者原型预览,新增医护人员原型预览,新增病房原型预览,选择床位原型预览,主治医生原型预览,主治医生医嘱原型预览 Mybaits-plus快速入门 大学生必备的15个网站,大学生考试报名,大学生自学网站! SortedMap、NavigableMap C++类中的特殊成员函数 eclipse(luna)创建web工程 MySQL几个简单SQL的优化 Mysql优化 Netty 框架总结「ChannelHandler 及 EventLoop」 PAT A1120 react-native 安卓真机环境搭建 React的组件模式 Redux系列x:源码分析 Shadow DOM 内部构造及如何构建独立组件 笨办法学C 练习34:动态数组 开发基于以太坊智能合约的DApp 设计模式走一遍---观察者模式 使用docker-compose进行多节点部署 微服务框架lagom 小程序01:wepy框架整合iview webapp UI 协程 这几个编码小技巧将令你 PHP 代码更加简洁 浅谈sql中的in与not in,exists与not exists的区别 LeetCode解法汇总1410. HTML 实体解析器 你们这样子,耽误我的工作进度怎么办? (JSP)EL——优化登录界面,获取对象,获取数据 (附源码)springboot工单管理系统 毕业设计 964158 (九)One-Wire总线-DS18B20 (实战)静默dbca安装创建数据库 --参数说明+举例 (四)TensorRT | 基于 GPU 端的 Python 推理 (一)Neo4j下载安装以及初次使用 (转) 深度模型优化性能 调参 (最优化理论与方法)第二章最优化所需基础知识-第三节:重要凸集举例 .bat批处理(二):%0 %1——给批处理脚本传递参数 .net 4.0 A potentially dangerous Request.Form value was detected from the client 的解决方案 .NET/C# 反射的的性能数据,以及高性能开发建议(反射获取 Attribute 和反射调用方法) .NET连接MongoDB数据库实例教程 .NET使用HttpClient以multipart/form-data形式post上传文件及其相关参数 .NET委托:一个关于C#的睡前故事 @基于大模型的旅游路线推荐方案 [【JSON2WEB】 13 基于REST2SQL 和 Amis 的 SQL 查询分析器 [ASP.NET MVC]如何定制Numeric属性/字段验证消息 [Assignment] C++1 [BUUCTF]-PWN:wustctf2020_number_game解析(补码,整数漏洞)