DeepGLO
代码:https://github.com/rajatsen91/deepglo
文章主要有三点创新:
- Leveled-Init TCN, 对 TCN 的改进,使用 LeveledInit 方法初始化 TCN 权重,使得 TCN 更好地处理不同尺度的时间序列;
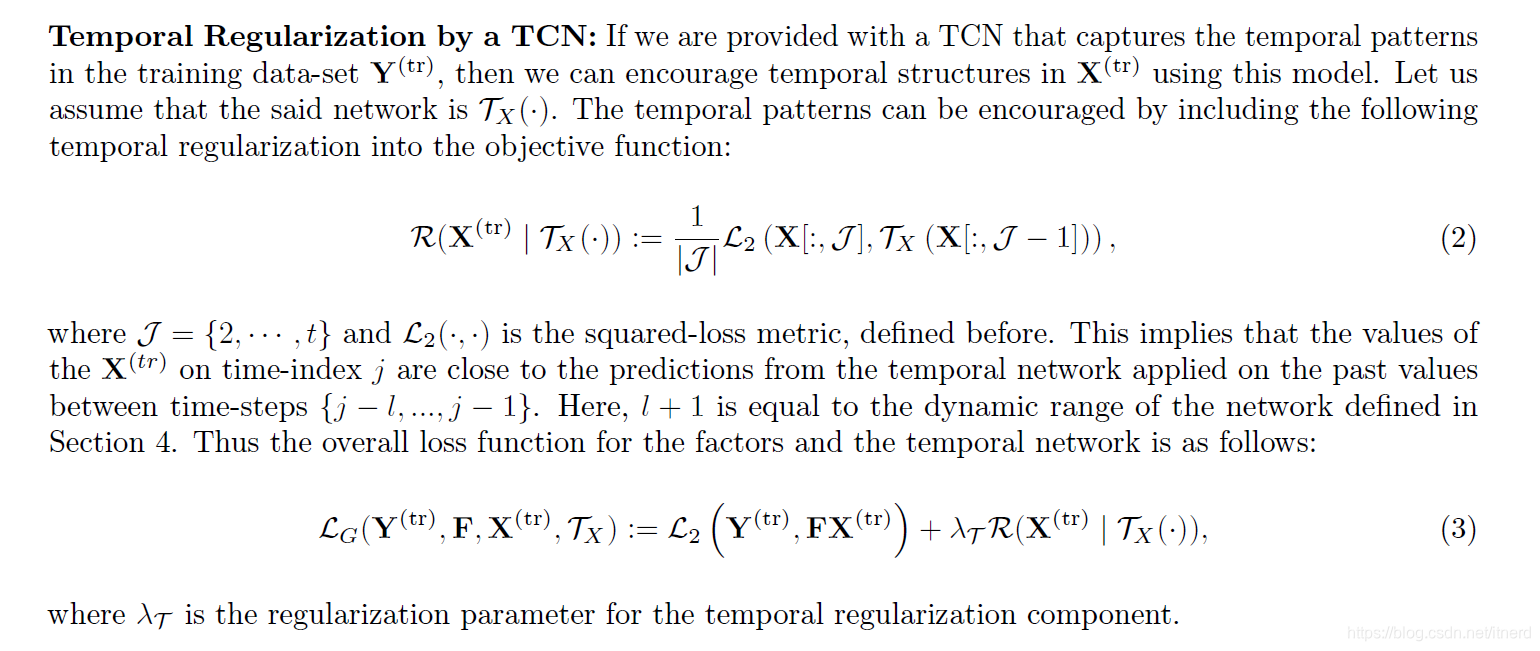
- TCN-MF,用 TCN 来对多变量时间序列预测的矩阵分解法做正则化
- DeepGLO,把矩阵分解法 MF 得到的 包含全局信息的因子序列及其预测值 作为局部序列预测时的协变量。
LeveledInit TCN
从如下代码中可以看出对 TCN 权值初始化部分的改动
class Chomp1d(nn.Module):
def __init__(self, chomp_size):
super(Chomp1d, self).__init__()
self.chomp_size = chomp_size
def forward(self, x):
return x[:, :, : -self.chomp_size].contiguous()
class TemporalBlock(nn.Module):
def __init__(
self,
n_inputs,
n_outputs,
kernel_size,
stride,
dilation,
padding,
dropout=0.1,
init=True,
):
super(TemporalBlock, self).__init__()
self.kernel_size = kernel_size
self.conv1 = weight_norm(
nn.Conv1d(
n_inputs,
n_outputs,
kernel_size,
stride=stride,
padding=padding,
dilation=dilation,
)
)
self.chomp1 = Chomp1d(padding)
self.relu1 = nn.ReLU()
self.dropout1 = nn.Dropout(dropout)
self.conv2 = weight_norm(
nn.Conv1d(
n_outputs,
n_outputs,
kernel_size,
stride=stride,
padding=padding,
dilation=dilation,
)
)
self.chomp2 = Chomp1d(padding)
self.relu2 = nn.ReLU()
self.dropout2 = nn.Dropout(dropout)
self.net = nn.Sequential(
self.conv1,
self.chomp1,
self.relu1,
self.dropout1,
self.conv2,
self.chomp2,
self.relu2,
self.dropout2,
)
self.downsample = (
nn.Conv1d(n_inputs, n_outputs, 1) if n_inputs != n_outputs else None
)
self.init = init
self.relu = nn.ReLU()
self.init_weights()
def init_weights(self):
if self.init:
nn.init.normal_(self.conv1.weight, std=1e-3)
nn.init.normal_(self.conv2.weight, std=1e-3)
self.conv1.weight[:, 0, :] += (
1.0 / self.kernel_size
) ###new initialization scheme
self.conv2.weight += 1.0 / self.kernel_size ###new initialization scheme
nn.init.normal_(self.conv1.bias, std=1e-6)
nn.init.normal_(self.conv2.bias, std=1e-6)
else:
nn.init.xavier_uniform_(self.conv1.weight)
nn.init.xavier_uniform_(self.conv2.weight)
if self.downsample is not None:
self.downsample.weight.data.normal_(0, 0.1)
def forward(self, x):
out = self.net(x)
res = x if self.downsample is None else self.downsample(x)
return self.relu(out + res)
class TemporalBlock_last(nn.Module):
def __init__(
self,
n_inputs,
n_outputs,
kernel_size,
stride,
dilation,
padding,
dropout=0.2,
init=True,
):
super(TemporalBlock_last, self).__init__()
self.kernel_size = kernel_size
self.conv1 = weight_norm(
nn.Conv1d(
n_inputs,
n_outputs,
kernel_size,
stride=stride,
padding=padding,
dilation=dilation,
)
)
self.chomp1 = Chomp1d(padding)
self.relu1 = nn.ReLU()
self.dropout1 = nn.Dropout(dropout)
self.conv2 = weight_norm(
nn.Conv1d(
n_outputs,
n_outputs,
kernel_size,
stride=stride,
padding=padding,
dilation=dilation,
)
)
self.chomp2 = Chomp1d(padding)
self.relu2 = nn.ReLU()
self.dropout2 = nn.Dropout(dropout)
self.net = nn.Sequential(
self.conv1,
self.chomp1,
self.dropout1,
self.conv2,
self.chomp2,
self.dropout2,
)
self.downsample = (
nn.Conv1d(n_inputs, n_outputs, 1) if n_inputs != n_outputs else None
)
self.init = init
self.relu = nn.ReLU()
self.init_weights()
def init_weights(self):
if self.init:
nn.init.normal_(self.conv1.weight, std=1e-3)
nn.init.normal_(self.conv2.weight, std=1e-3)
self.conv1.weight[:, 0, :] += (
1.0 / self.kernel_size
) ###new initialization scheme
self.conv2.weight += 1.0 / self.kernel_size ###new initialization scheme
nn.init.normal_(self.conv1.bias, std=1e-6)
nn.init.normal_(self.conv2.bias, std=1e-6)
else:
nn.init.xavier_uniform_(self.conv1.weight)
nn.init.xavier_uniform_(self.conv2.weight)
if self.downsample is not None:
self.downsample.weight.data.normal_(0, 0.1)
def forward(self, x):
out = self.net(x)
res = x if self.downsample is None else self.downsample(x)
return out + res
class TemporalConvNet(nn.Module):
def __init__(self, num_inputs, num_channels, kernel_size=2, dropout=0.1, init=True):
super(TemporalConvNet, self).__init__()
layers = []
self.num_channels = num_channels
self.num_inputs = num_inputs
self.kernel_size = kernel_size
self.dropout = dropout
num_levels = len(num_channels)
for i in range(num_levels):
dilation_size = 2 ** i
in_channels = num_inputs if i == 0 else num_channels[i - 1]
out_channels = num_channels[i]
if i == num_levels - 1:
layers += [
TemporalBlock_last(
in_channels,
out_channels,
kernel_size,
stride=1,
dilation=dilation_size,
padding=(kernel_size - 1) * dilation_size,
dropout=dropout,
init=init,
)
]
else:
layers += [
TemporalBlock(
in_channels,
out_channels,
kernel_size,
stride=1,
dilation=dilation_size,
padding=(kernel_size - 1) * dilation_size,
dropout=dropout,
init=init,
)
]
self.network = nn.Sequential(*layers)
def forward(self, x):
return self.network(x)
TCN-MF
Temporal Convolution Network regularized Matrix Factorization
本质上和动态因子图是一回事:
一方面假设原始的多变量序列
Y
Y
Y 是某些典型动态序列
X
X
X 的线性组合:
Y
=
F
X
Y = FX
Y=FX
另一方面,
X
X
X 的动态行为可以用 TCN 来建模:
X
t
=
T
X
(
X
t
−
1
)
X_t = \mathbf{\Tau}_X(X_{t-1})
Xt=TX(Xt−1)