[AutoSar]BSW_Com02 PDU详解
目录
- 关键词
- 平台说明
- 缩写对照表
- 一、PDU的定义和分类
- 1.1定义
- 1.2 分类
- 缩写对照表 1
关键词
嵌入式、C语言、autosar、OS、BSW
平台说明
| 项目 | Value |
|---|---|
| OS | autosar OS |
| autosar厂商 | vector , |
| 芯片厂商 | TI 英飞凌 |
| 编程语言 | C,C++ |
| 编译器 | HighTec (GCC) |

>>>>>回到总目录<<<<<<
缩写对照表
见文末
一、PDU的定义和分类
1.1定义
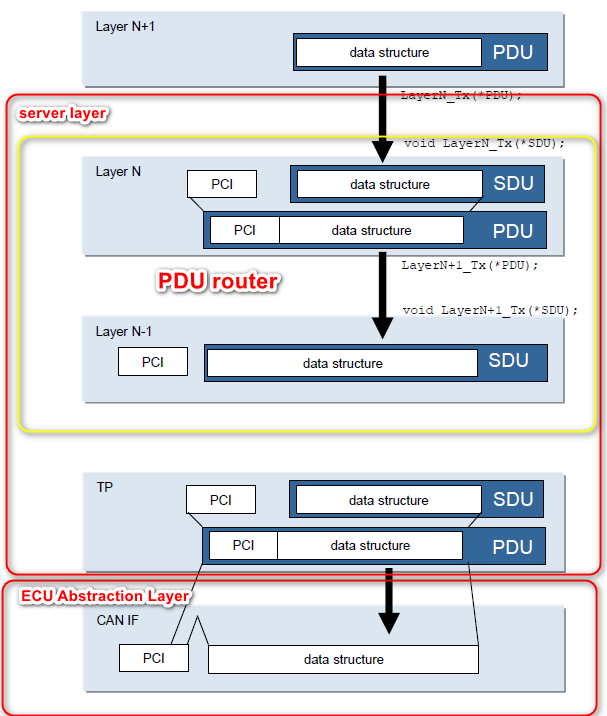
PDU (Protocol Data Unit),包含SDU和PCI。在传输端,PDU从上层传递到下层,下层将PDU解释为SDU。
SDU(Service Data Unit),它是由上层传递的数据,带有传输数据的请求。它也是由下层接收后提取的数据传递给上层的数据。
PCI (Protocol Control Information),将SDU从特定协议层的一个实例传递到另一个实例时需要此信息。例如,它包含源和目标信息。PCI在传输端由协议层添加,在接收端再次移除。
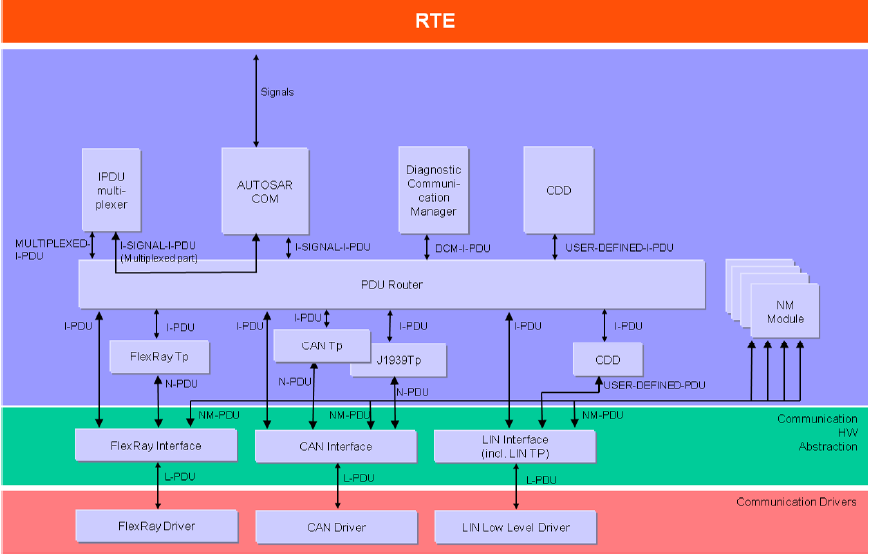
讲人话,如下图所示:PDU = SDU+PCI。PCI 包含了当前层信息和目标层信息。在Can driver 中生成 PCI 和 数据结构(L-PDU),在Can if 中抽象隔离为N-PDU 然后CAN TP中组合成I-PDU。最终在PDU router 中根据PCI信息解析得到目标地址传给COM,在COM中对SDU进行解析将数据传到RTE–>应用层。
1.2 分类
数据链路层: L-PDU(Interaction Layer Protocol Data Unit)
在COM中打包或者拆包SDU。在外部通信的情况下,交互层将一个或多个信号打包到指定的i - pdu中,并将它们传递给底层,以便在网络中的节点之间传输。
网络层(TP层): N-PDU(Network Layer Protocol Data Unit)
在CAN TP 中打包或者拆包。TP模块的主要目的是分割和重新组装不适合指定N- pdu的I - pdu。实现N-PDU与 I-PDU的转换。
交互层: I-PDU(Data Link Layer Protocol Data Unit)
在ECU抽象层(CanIf)中实现打包或者拆包。将SUD和PCI 组装或者拆包。
缩写对照表 1
| 缩写 | 描述 |
|---|---|
| Can CC | CAN Communication Controller |
| CAN CF | CAN Consecutive Frame N-PDU |
| CAN FC | CAN Flow Control N-PDU |
| CAN FD | CAN flexible data rate |
| CAN FF | CAN First Frame N-PDU |
| CAN N-PDU | The PDU of the CAN Transport Layer |
| CAN N-SDU | The SDU of the CAN Transport Layer |
| CAN SF | CAN Single Frame N-PDU |
| CDD | Complex Device Driver |
| CRC | Cyclic Redundancy Checksum |
| DLC | Data Length Code. The portion of an L-PDU which describes the SDU length |
| ETK | Provides development and calibration tools with a powerful interface to the development ECU |
| FD | Flexible Data |
| FUP message | Time adjustment message (Follow-Up) |
| GTD | Global Time Domain |
| GTM | Global Time Master |
| HOH | Hardware Object Handle - identifier for a specific CAN mailbox structure |
| HRH | Hardware Receive Handle - HOH for receive operations (defined by Can) |
| HTH | Hardware Transmit Handle - HOH for transmission operations (defined by Can) |
| L-PDU | Protocol Data Unit. Consists of an identifier, DLC and data portion (SDU). Visible to the Can module |
| L-SDU | Service Data Unit. Data transported inside a CAN L-PDU. Visible to the upper layer modules (e.g. PduR) |
| MSB | Most Significant Bit |
| N_Ar | Time from transmission of the CAN frame (any N_PDU) on the receiver side until function CanTp_TxConfirmation() is called |
| N_As | The time for transmission of a CAN frame (any N_PDU) on the part of the sender until function CanTp_TxConfirmation() is called |
| N_Br | Time from receiving the N_PDU CanFrame (FF,CF,FC) until transmission of the next FlowControl N_PDU |
| N_Bs | Time from transmission N_PDU CanFrame (FF, CF, FC) until receiving of next FlowControl N_PDU |
| N_Crv | Time from transmission of CAN frame (FC) until reception of the next Consecutive Frame N_PDU |
| N_Cs | Time from receiving N_PDU FlowControl until transmission of the next Consecutive Frame N_PDU in the sender side |
| N_PCI | Network protocol control information |
| N_TAtype | The N_TA parameter shall be used to encode one or multiple (depending on the N_TAtype: physical or functional)receiving network layer protocol entities |
| OFNS message | Offset adjustment message |
| OBD | On-Board Diagnosis |
| OFS message | Offset synchronization message |
| PDU | Protocol Data Unit |
| PN | Partial Networking |
| PNI | Partial Network Information |
| Rx | Receipt/Reception |
| Rx L-PDU | Received L-PDU (lower to upper layer) |
| SDU | Service Data Unit |
| StbM | Synchronized Time-Base Manager |
| TD | Time Domain |
| TG | Time Gateway |
| TM | Time Master |
| TS | Time Slave |
| TSD | Time Sub-domain |
| Tx | Transmission |
| Tx L-PDU | Transmitted L-PDU (upper to lower layer) |
| UDS | Unified Diagnostic Services |
| WUF | Wake up flag |
| XCP | A protocol description (ASAM standard) between a master (tool) and a slave (device) |
| SF: | Single Frame |
| FF: | First Frame |
| CF: | Consecutive Frame |
| FC: | Flow Control |
>>>>>回到总目录<<<<<<