配电房轨道式巡检机器人方案
一、应用背景
在变电站、配电房、开关站等各种室内变配电场所内,由于变配电设备的数量众多、可能存在各类安全隐患,为了保证用电的安全可靠,都要进行日常巡检。 但目前配电房人工巡检方式有以下主要问题:
- 巡检工作量大、成本高
配电室设备多、巡检项目多,人工巡检工作量大、劳动强度大,人员成本高。
- 无法及时发现隐患
人工巡检的巡检周期较长,无法及时发现设备异常,无法从源头上预防事故的发生。同时人工巡检的质量依赖人的能力和责任心,难以保证。
- 巡检工作本身存在安全隐患
巡检人员频繁进出配电房,对漏电、有害气体等环境危险无法预知,容易造成重大安全生产事故。
为解决以上问题,快控数字能源研发出一套能够进行自动化巡检的智能机器人系统。通过这套系统能让运维人员不用到达配电房现场就可全面掌握配电房等的运行状态,减少巡检次数,降低日常维护的人员、车辆等运维成本,提高配电房运维管理水平。
二、快控配电房巡检机器人解决方案
2.1 主要功能
快控KR200配电房巡检机器人针对无人值守配电房场景,实现配电房的远程巡检、自动巡检。机器人采用轨道吊装式行走方式,支持大尺度升降,可搭载高清摄像机、红外热成像仪、环境监测等各类智能监测设备,集网络通信技术、物联网传感器技术、边缘计算等核心技术于一体,可实现24小时不间断的现场自动巡视。同时机器人具备视频监控以及AI识别功能,可识别开关柜上仪表、指示灯等相关电气设备的数据和状态的识别和数据处理。
运维人员可在远程对配电房的巡视管理,提高巡检效率、提高发现问题的及时性。机器人可接入快控电力运维云平台,实现固定式智能监测设备与移动式智能监测设备的完美结合,实现配电房的全面智能化。
巡检机器人巡检与人工巡检的对比分析:
| 项目 | 人工巡检 | 机器人智能巡检 | |
| 巡检方式 | 眼看、耳听、鼻闻、 | 智能检测与智能识别 | |
| 巡检内容 | 部分表计的读数 基于体感的环境异常判断 | 所有表计、状态指示的识别与记录 设备关联分析 设备温度检测 | |
| 数据记录 | 人工观察和必要时记录 | 报表自动生成 | |
| 实时性 | 无法实时反馈 难以及时发现故障 | 实时反馈现场视频、环境等信息 故障实时监测并及时报警 | |
| 可靠性 | 差 | 受观测条件影响 | 客观性强、一致性高 |
| 受业务水平影响 | |||
| 受人员主观性影响 | |||
| 分析预警 | 无 | 数据汇总、统计、分析 设备状态隐患预警、运行故障告警 | |
2.2系统架构
导轨式巡检机器人系统集视频巡检、红外测温、环境监控、远程交互、数据分析告警等功能于一体,可实现对配电房各类设备的实时远程自动巡检。巡检机器人系统可以自主或遥控的方式对配电房内电气设备进行巡检,识别设备状态,及时发现设备的缺陷并自动报警,实现配电房的无人值守、智能管控。
巡检机器人系统由管理系统(本地、云端、第三方系统API集成)、轨道系统、供电系统、通信系统、机器人主机等子系统组成。架构如下图:
图2-2 挂轨机器人系统架构图
导轨式巡检机器人主机主要功能模块:
| 序号 | 名称 | 描述 |
| 1 | 可见光摄像机 | 采集可见光图像 |
| 2 | 防撞雷达 | 检测机器人前、后、下是否存在障碍物 |
| 3 | 热成像仪 | 选装:采集热成像图像 |
| 4 | 环境检测模块 | 温度、湿度、噪声、有害气体探测(选装) |
| 5 | 行走机构 | 控制机器人前进后退行走机构 |
| 6 | 升降机构 | 控制机器人升降机械结构(铰链) |
| 7 | 对讲系统 | 选装:前端设备音频输出放大功能 |
| 8 | 状态灯 | 显示机器人不同状态灯光指示 |
| 9 | 云台 | 支持云台水平360°旋转 |
| 10 | 补光系统 | 选装:光线较暗时自动进行补光 |
三、KR200轨道巡检机器人功能介绍
3.1 视频监视
轨道式巡检机器人通过携带的一体化云台摄像头,可对各电气设备进行实时视频图像的采集,并根据运维的需要将图像信息经传回上层管理系统,同时自动记录拍摄地点和设备名称。

图3-1视频监视
3.2 设备状态和数据智能识别

图3-2 表计识别读数示意图
3.3 红外测温
巡检机器人利用自身携带的红外热成像仪对室内电力设备温度数据进行采集和分析,及时诊断出致热设备故障及热缺陷,触发相应报警。
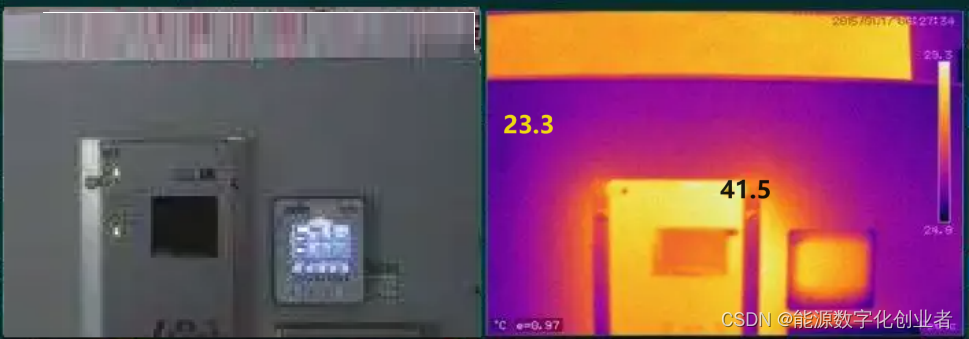
图3-3 红外热像测温图示意图
3.4 环境检测
巡检机器人自身携带的多种环境监测模块,能对有害气体、温度、湿度、噪声等环境信息进行实时监控,为远程的运维人员提供全面的配电房环境信息。当监测到有害气体超标时,系统将进行报警,以提示运维人员及时处理。
3.5 巡检功能
巡检机器人具备自动巡检和人工巡检两种巡检模式。
3.6.1自动巡检
自动巡检是巡检机器人按照预设好的巡检路径、巡检位置、目标设备等自动进行的巡视方式。机器人按照既定的规则完成室内各处的设备进行可见光拍照、表计读数、红外测温及环境监测等巡检活动将巡检数据自动传输到后台管理系统保存,生成检测分析报告。

图3-5 自动巡检报告
巡检机器人除自动巡检外,还可以通过人工遥控巡检的方式对机器人进行实时遥控。运维人员可以在管理后台的人工遥控界面操控机器人快速到达需要巡检设备的位置,及时对该设备进行全面的监测和查看。
此外,KR200轨道巡检机器人系统还具备告警联动、语音对讲等高级功能。
四、系统价值
部署KR200轨道巡检机器人可大大降低无人值守配电房的运维成本、提高运维质量。内蒙古某煤矿企业安装KR200后,4个配电房每年节省巡检电工成本约12万元,巡检频度提升6倍。相信随着企业对供电安全性需求的进一步提高,巡检机器人将得到更广泛的应用。