51单片机学习笔记10 IIC通讯和EEPROM
51单片机学习笔记10 IIC通讯和EEPROM
- 一、IIC通讯简介
- 1. 基本特点
- 优点
- 缺点
- 2. 工作模式
- 3. 整体流程
- 4. 信号流程
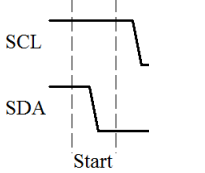
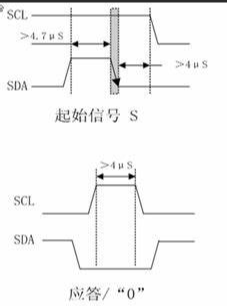
- **起始信号**
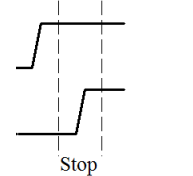
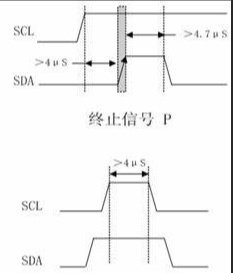
- **停止信号**
- **应答信号**
- 非应答信号
- 主机等待从机应答
- 完整写入过程
- 完整读取过程
- 二、AT24C02 芯片介绍
- 1. 引脚介绍
- 2. 典型总线配置
- 三、开发示例
- 1. 硬件连接
- 2. 软件实现
- i2c_utils.c
- eeprom_utils.c
- main.c

一、IIC通讯简介
IIC(也被称为I²C,是一种串行通信协议。它由Philips Semiconductor(现在的NXP Semiconductors)在1980年代初期开发,用于在集成电路(IC)之间进行低速、短距离的通信。I²C协议广泛应用于嵌入式系统中,尤其是在微控制器与各种外围设备之间的通信,如传感器、EEPROM、RTC(实时时钟)等。
1. 基本特点
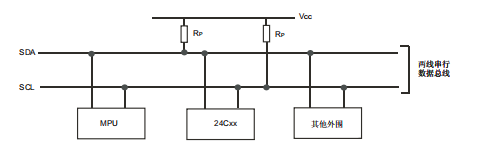
- 两线制接口:I²C协议只需要两根线进行通信,一根是串行数据线(SDA),另一根是串行时钟线(SCL)。
- 多主设备:I²C允许多个主设备(master)和多个从设备(slave)在同一总线上通信。每个设备都有一个唯一的7位或10位地址。
- 同步通信:数据传输是同步进行的,由主设备提供时钟信号。
- 支持多主机:在多主机系统中,通过一种称为“仲裁”的机制来解决两个或多个主设备同时尝试控制总线的情况。
- 数据传输速率:I²C支持多种数据传输速率,标准模式下为100kbps,快速模式为400kbps,还有更快速的版本如快速模式加(Fast-mode Plus,1Mbps)和高速模式(High-speed Mode,3.4Mbps)。
其主要的优缺点:
优点
- 线路简单:只需要两根线,减少了硬件成本和PCB布局的复杂性。
- 易于扩展:可以轻松添加或移除设备,只需修改地址即可。
- 低功耗:适合低功耗应用,如便携式设备。
缺点
- 速度较慢:与其他串行通信协议相比,I²C的数据传输速度较慢。
- 总线冲突:如果多个主设备尝试同时通信,可能会导致总线冲突。
- 距离限制:虽然支持长总线,但随着距离的增加,信号质量会下降。
I²C协议因其简单性和灵活性,在嵌入式系统中得到了广泛的应用。然而,随着技术的发展,新的通信协议如I²C的替代品也在不断出现,以满足更高速度和更复杂系统的需求。
2. 工作模式
- 写入模式:主设备发送数据到从设备。
- 读取模式:主设备从从设备接收数据。
3. 整体流程
-
启动信号:
- 主设备生成起始信号,即将SDA从高电平拉低时,同时SCL保持高电平。这表示通信即将开始。
-
从机地址发送:
- 主设备发送从机地址,包括从机地址和读/写位。根据I2C协议,从机地址的最低位用于表示读写方向,0表示写,1表示读。
-
应答信号接收:
- 主设备发送完从机地址后,会释放SDA线,等待从机发送应答信号。从机成功接收地址后,发送ACK信号。
-
数据传输:
- 主设备发送数据字节,将每个数据字节依次发送到从设备。每发送一个数据字节,主设备会等待从设备的ACK信号,确认从设备已成功接收数据。
-
重复步骤3和4:
- 主设备可以连续发送多个数据字节,每发送一个数据字节都需要等待从设备的ACK信号。
-
停止信号:
- 主设备发送完所有数据后,生成停止信号,即将SDA从低电平拉高时,同时SCL保持高电平。这表示通信结束。
4. 信号流程
I²C协议的信号流程包括多个状态,如启动条件(Start Condition)、停止条件(Stop Condition)、应答位(Acknowledge Bit)和数据传输。
起始信号
当主设备将SDA线从高电平拉低,同时SCL线保持高电平时,生成一个启动条件。
代码实现:
IIC_SCL=1;
IIC_SDA=1;
delay_10us(1);
IIC_SDA=0;
delay_10us(1);
IIC_SCL=0;
停止信号
当主设备将SDA线从低电平拉高,同时SCL线保持高电平时,生成一个停止条件。
代码实现:
/**
* @brief I2C 停止信号
*/
void i2c_stop(void)
{IIC_SCL=1;IIC_SDA=0;delay_10us(1);IIC_SDA=1;delay_10us(1);
}应答信号
当从设备成功接收到数据后,通过拉低SDA线发送一个应答信号(ACK)。
/**
* @brief I2C 应答信号
*/
void i2c_ack(void)
{IIC_SCL=0;IIC_SDA=0;delay_10us(1);IIC_SCL=1;delay_10us(1);IIC_SCL=0;
}
非应答信号
当从设备成功接收到数据后,保持SDA线为高电平发送一个不应答信号(NACK)。
代码实现:
/**
* @brief I2C 非应答信号
*/
void i2c_nack(void)
{IIC_SCL=0;IIC_SDA=1;delay_10us(1);IIC_SCL=1;delay_10us(1);IIC_SCL=0;
}主机等待从机应答
主机发送数据后,需要等待从机的应答信号,以确认从机是否成功接收到数据。
- 主机发送完一个数据字节后,释放SDA线,并保持SCL线为高电平。
- 主机等待一段时间(等待从机发送应答信号)。
- 如果从机成功接收到数据并准备好接收下一个数据字节,则会发送一个ACK信号,此时SDA线会被从低电平拉高(应答)。
- 如果从机未能正确接收数据或者出现其他错误,则会发送一个NACK信号,此时SDA线会保持为低电平(不应答)。
- 主机在等待一段时间后,会检测SDA线的电平,以判断从机的应答状态。
完整写入过程
/**
* @brief EEPROM 写入数据
*/
void at24c02_write(u8 addr,u8 dat)
{i2c_start();i2c_send_byte(0xa0);i2c_wait_ack();i2c_send_byte(addr);i2c_wait_ack();i2c_send_byte(dat);i2c_wait_ack();i2c_stop();
}完整读取过程
/**
* @brief EEPROM 读取数据
*/
u8 at24c02_read(u8 addr)
{u8 dat;i2c_start();// 发送器件地址和写控制位i2c_send_byte(0xa0);i2c_wait_ack();// 写入要读取的地址i2c_send_byte(addr);i2c_wait_ack();// 改变传送方向,读写信号反过来,重新启动i2c_start();// 发送器件地址和读控制位i2c_send_byte(0xa1);i2c_wait_ack();// 读取数据dat=i2c_read_byte(0);i2c_stop();return dat;
}二、AT24C02 芯片介绍
24C02/043/08/16/321/64 是电可擦除 PROM, 容易分别是2K位、4K位、16K位、32K位、64K位,是采用串行I2C总线的EEPROM芯片,其电压可允许低至1.8V,待机电流1uA,工作电流 1mA。
1. 引脚介绍
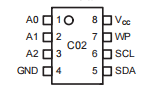
- VCC:电源输入引脚,通常连接到系统的正电源(例如5V)。
- GND:接地引脚,连接到系统的地线。
- SCL:串行时钟线(Serial Clock),用于在I²C通信中提供时钟信号。主设备通过这个引脚控制数据的时序。
- SDA:串行数据线(Serial Data),用于在主设备和AT24C02之间传输数据。
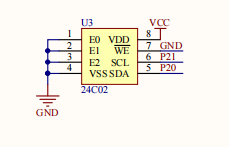
- A0、A1、A2:硬件地址引脚。这些引脚通过不同的电平组合(高电平或低电平)来确定EEPROM在I²C总线上的唯一地址。当所有这些引脚都接地时(GND),AT24C02的默认地址是0xA0(写操作)或0xA1(读操作)。
- WP(Write Protect,写保护):这是一个输入引脚,用于防止EEPROM被写入。当WP引脚接高电平时,EEPROM被保护,只能读取数据,不能写入新数据。如果WP引脚接地或悬空(通常接地),则允许对EEPROM进行写入操作。
2. 典型总线配置
三、开发示例
1. 硬件连接
2. 软件实现
本代码示例,使用
- K2键 写数据到EEPROM,每次增加一,并通过串口输出当前值;
- K2键 读取EEPROM,通过串口输出值;
i2c_utils.c
#include "i2c_utils.h"
#include "common_utils.h"/**
* @brief I2C 起始信号
*/
void i2c_start(void)
{IIC_SDA=1; //如果把该条语句放在SCL后面,第二次读写会出现问题delay_10us(1);IIC_SCL=1;delay_10us(1);IIC_SDA=0; //当SCL为高电平时,SDA由高变为低delay_10us(1);IIC_SCL=0; //钳住I2C总线,准备发送或接收数据delay_10us(1);
}
/**
* @brief I2C 停止信号
*/
void i2c_stop(void)
{IIC_SDA=0;delay_10us(1);IIC_SCL=1;delay_10us(1);IIC_SDA=1;delay_10us(1);
}/**
* @brief I2C 应答信号
*/
void i2c_ack(void)
{IIC_SCL=0;IIC_SDA=0; //SDA为低电平delay_10us(1);IIC_SCL=1;delay_10us(1);IIC_SCL=0;
}
/**
* @brief I2C 非应答信号
*/
void i2c_nack(void)
{IIC_SCL=0;IIC_SDA=1; //SDA为高电平delay_10us(1);IIC_SCL=1;delay_10us(1);IIC_SCL=0;
}
/**
* @brief 主机等待从机应答
*/
u8 i2c_wait_ack(void){u8 ucErrTime=0;// 保持 SCL 高电平IIC_SCL=1;delay_10us(1);while(IIC_SDA){ucErrTime++;// 如果等待时间过长,返回错误if(ucErrTime>100){i2c_stop();return 1;}}IIC_SCL=0;return 0;
}
/**
* @brief I2C 发送一个字节
*/
void i2c_send_byte(u8 dat){u8 t;// 低电平时 可以SDA可以改变IIC_SCL=0;for(t=0;t<8;t++){// 最高位是1if((dat & 0x80)>0){// 发送 1IIC_SDA=1;}else{// 发送 0IIC_SDA=0;}// 下一位dat<<=1;delay_10us(1);// 时序IIC_SCL = 1;delay_10us(1);IIC_SCL = 0;delay_10us(1);}
}
/**
* @brief I2C 读取一个字节
* @param ack 0:非应答 1:应答
*/
u8 i2c_read_byte(u8 ack){u8 i,receive=0;for(i=0;i<8;i++){IIC_SCL=0;delay_10us(1);// 数据不能变了IIC_SCL=1;// 读前要移位, 从高位开始receive<<=1;if(IIC_SDA)receive++;delay_10us(1);}if (!ack)i2c_nack();elsei2c_ack();return receive;
}eeprom_utils.c
#include "eeprom_utils.h"
#include "i2c_utils.h"
#include "common_utils.h"/**
* @brief EEPROM 写入数据
*/
void at24c02_write(u8 addr,u8 dat)
{i2c_start();// a0=1010 0000 ,1010是固定的,0000是地址,这里是写入地址i2c_send_byte(0xa0);i2c_wait_ack();i2c_send_byte(addr);i2c_wait_ack();i2c_send_byte(dat);i2c_wait_ack();i2c_stop();delay_ms(10);
}
/**
* @brief EEPROM 读取数据
*/
u8 at24c02_read(u8 addr)
{u8 dat;i2c_start();// 发送器件地址和写控制位i2c_send_byte(0xa0);i2c_wait_ack();// 写入要读取的地址i2c_send_byte(addr);i2c_wait_ack();// 改变传送方向,读写信号反过来,重新启动i2c_start();// 发送器件地址和读控制位i2c_send_byte(0xa1);i2c_wait_ack();// 读取数据dat=i2c_read_byte(0);i2c_stop();return dat;
}main.c
#include <reg52.h>
#include "led_utils.h"
#include "common_utils.h"
#include "types.h"
#include "timer_utils.h"
#include "uart_utils.h"
#include "key_utils.h"
#include "eeprom_utils.h"
#include "types.h"static u8 i = 0;
/**
* @brief 按键3回调函数
*/
void key3_4Callback(int keyNum){u8 dat;if(keyNum == 3){LED1 = 1;at24c02_write(0x00, i);uart_send(i);i++;}else{LED1 = 0;// 读取数据dat = at24c02_read(0x00);uart_send(dat);}
}/**
* @brief 主函数
*/
main()
{// 关闭所有ledled_all_off();key3_init();key4_init();uart_init(0xFA);setCallback(key3_4Callback);while(1){}
}本文代码开源地址:
https://gitee.com/xundh/learn51