STM32系列(HAL库)——F103C8T6通过HC-SR04超声波模块实现测距
一、模块资料
(1)模块简介
超声波是振动频率高于20kHz的机械波。它具有频率高、波长短、绕射现象小、方向性好、能够成为射线而定向传播等特点。HC-SRO4是一款尺寸完全兼容老版本,增加UART和IIC功能的开放式超声波测距模块,默认条件下,软件与硬件完全兼容老版本HC-SRO4;可以通过电阻设置成UART或IIC模式。2CM盲区,4.5M典型最远测距,2.2mA作电流。采用升级解调芯片RCWL-9206,带UART与IIC功能MCU:使其外围更加简洁,工作电压更宽(3-5.5V),接口功能更多。
(2)模块参数
①专业解调测距芯片RCWL-9206 ②支持GPIO,UART与IIC三种模式接口 ③2.2mA工作电流 ④2cm最小盲区 ⑤2cm-450cm的超宽测量范围 ⑥工作温度:-10°C-70°c ⑦3V-5.5V宽电压供电
(3)工作原理


(4)实现思路
程序采用状态机编程,MCU给模块Trig引脚输出一个高电平脉冲-->模块发送脉冲信号-->定时器启动高电平输入捕获-->模块返回的高电平信号到达定时器开始计数-->返回信号变为低电平定时器停止计数-->得到定时器时间差-->根据公式计算距离
二、CubeMX配置
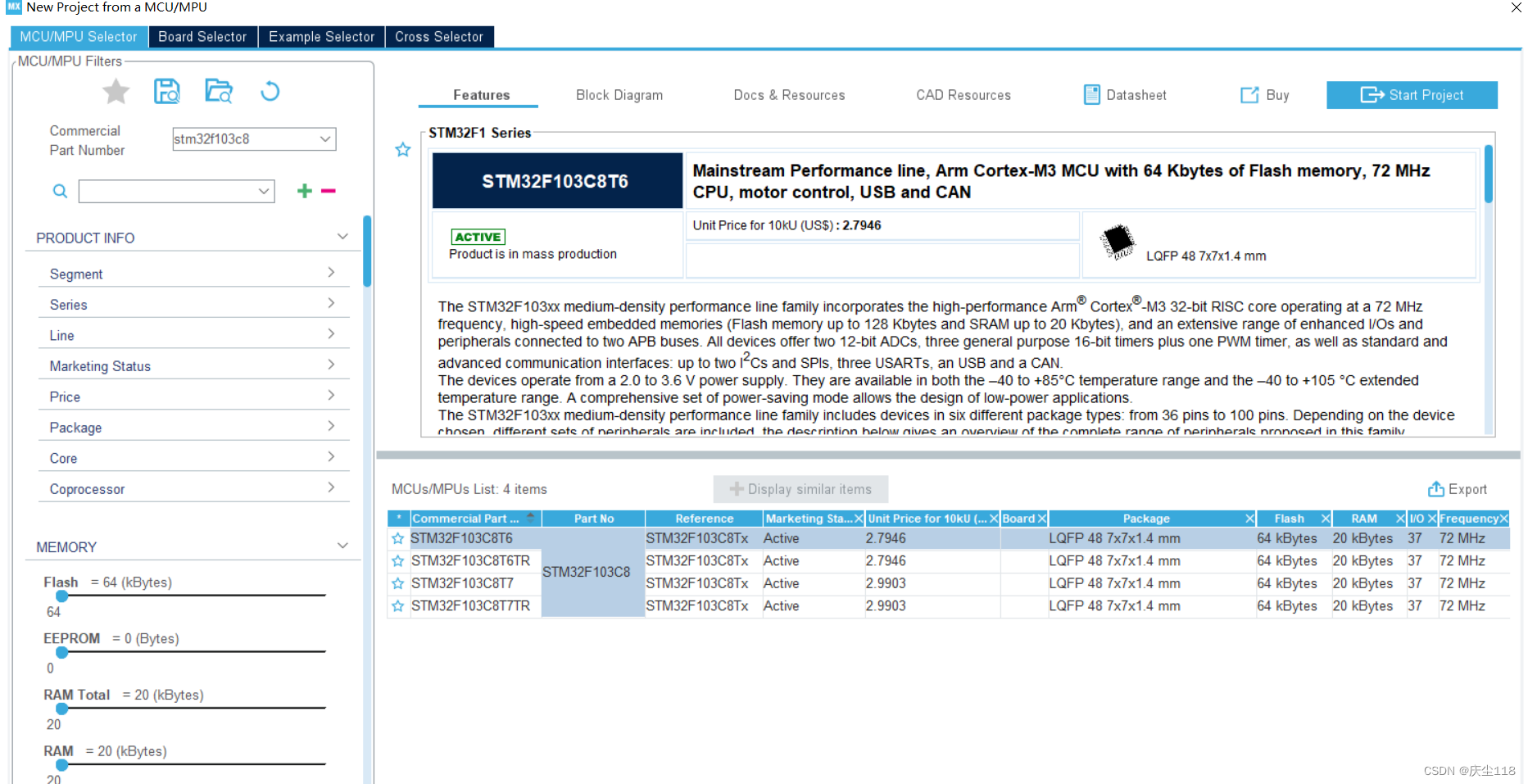
(1)芯片选择
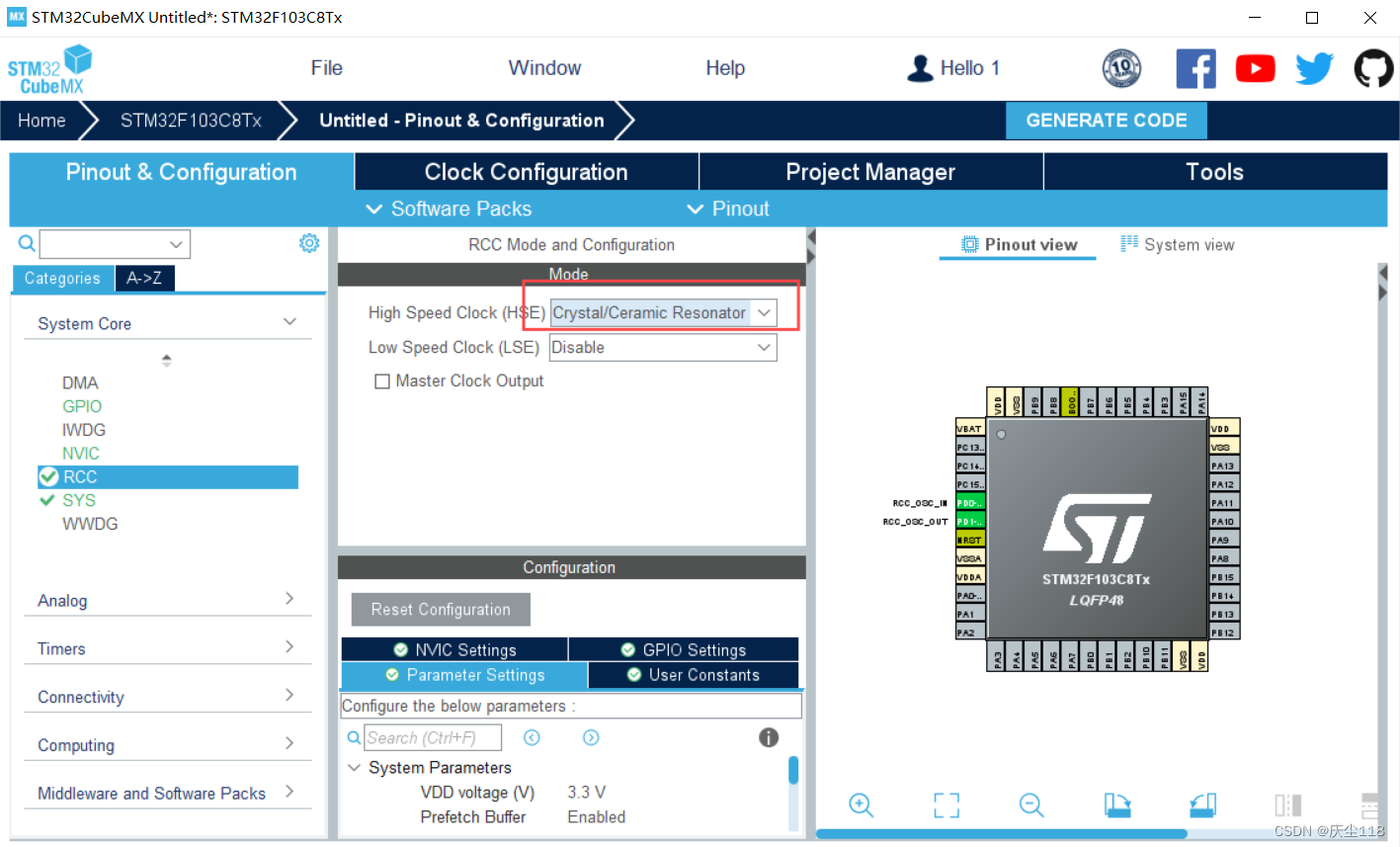
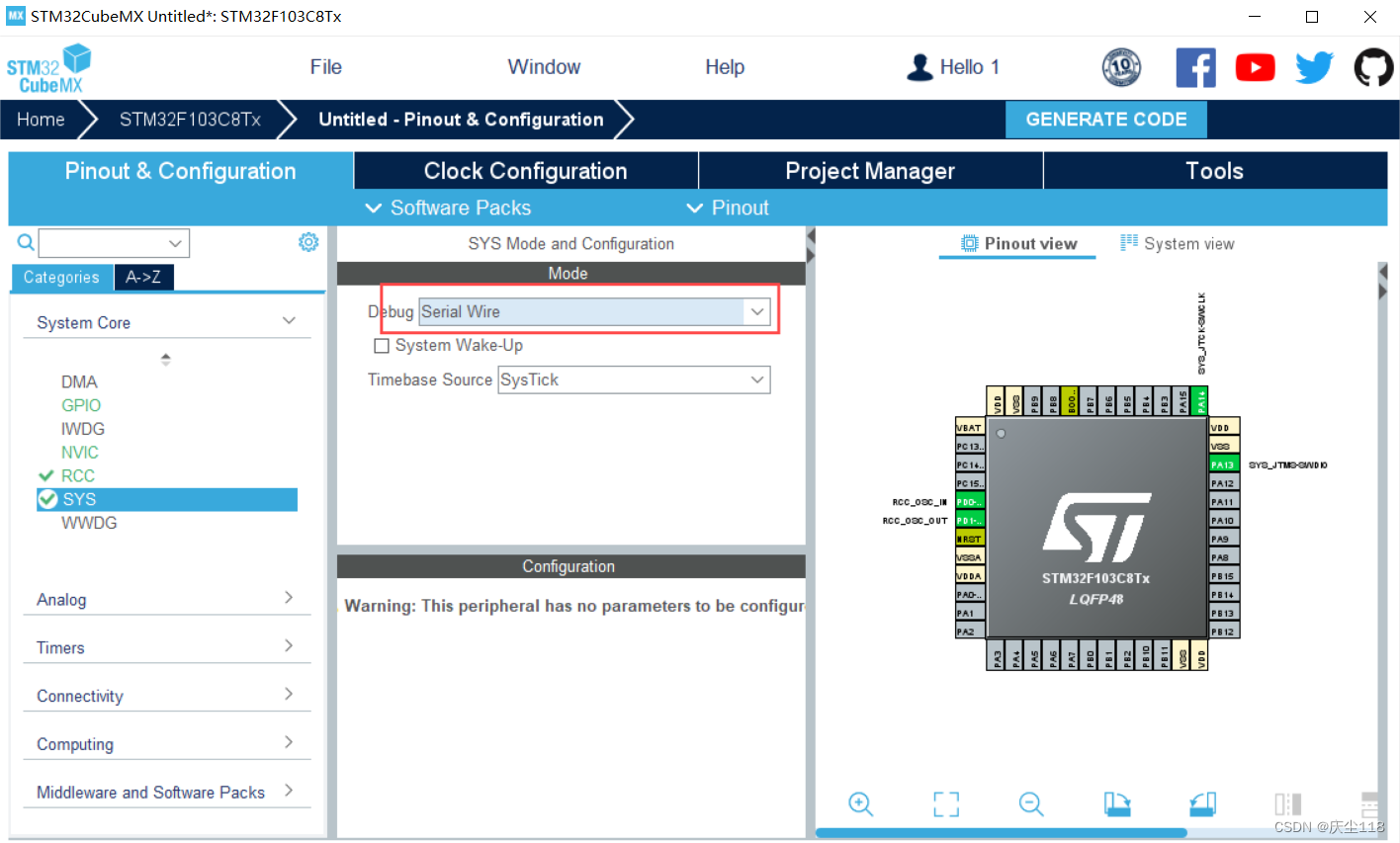
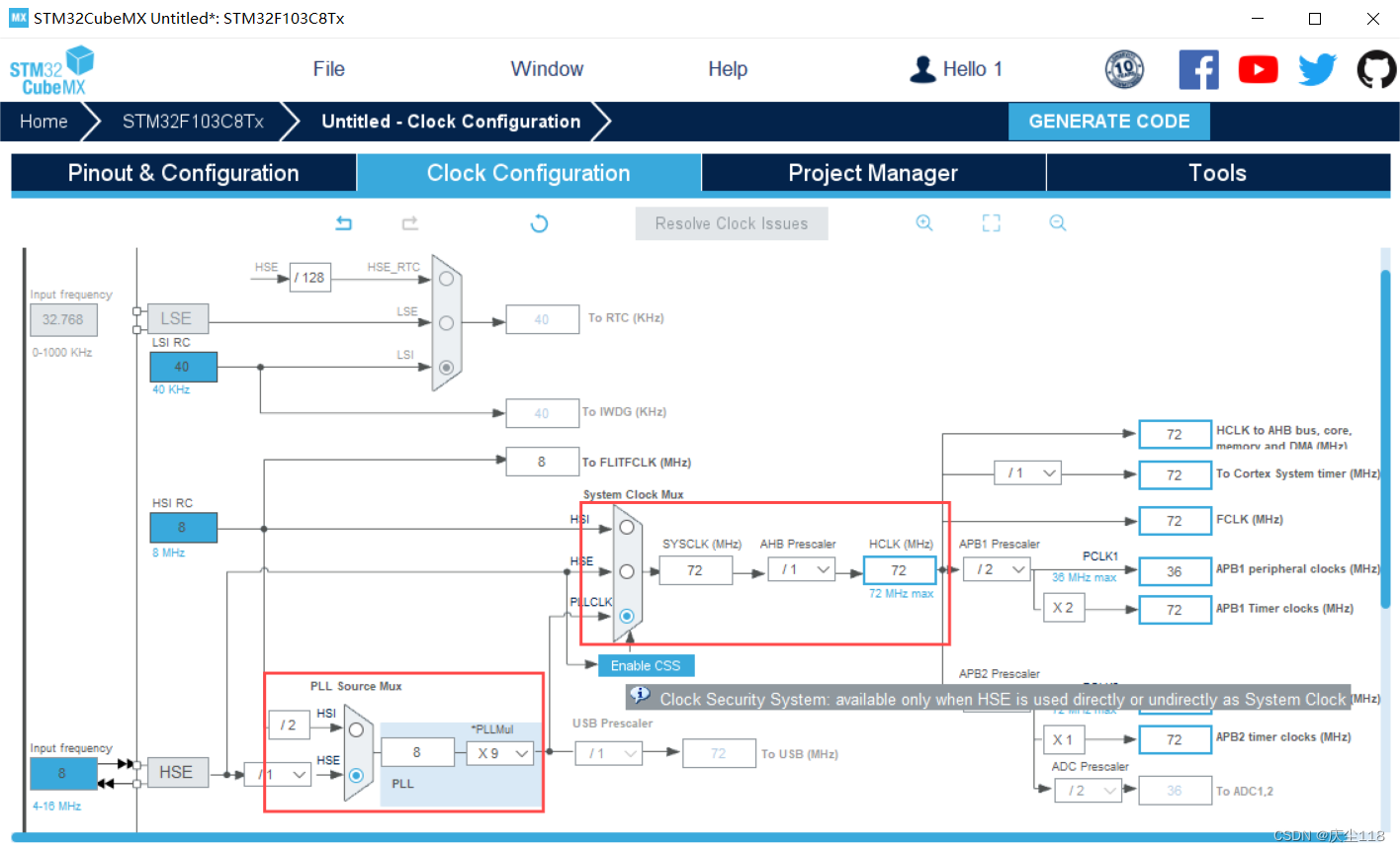
(2)配置RCC、SYS、时钟树
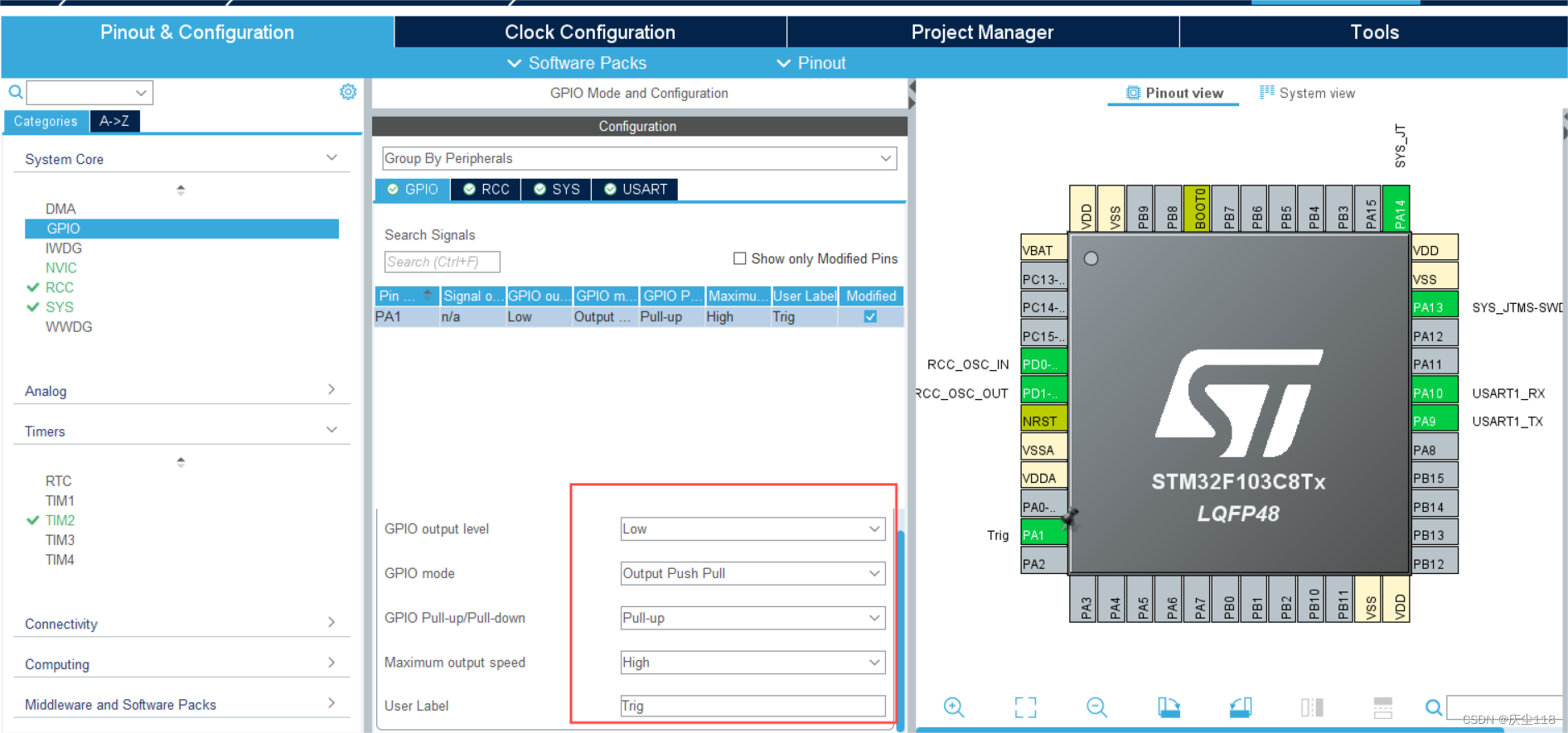
(3)配置GPIO
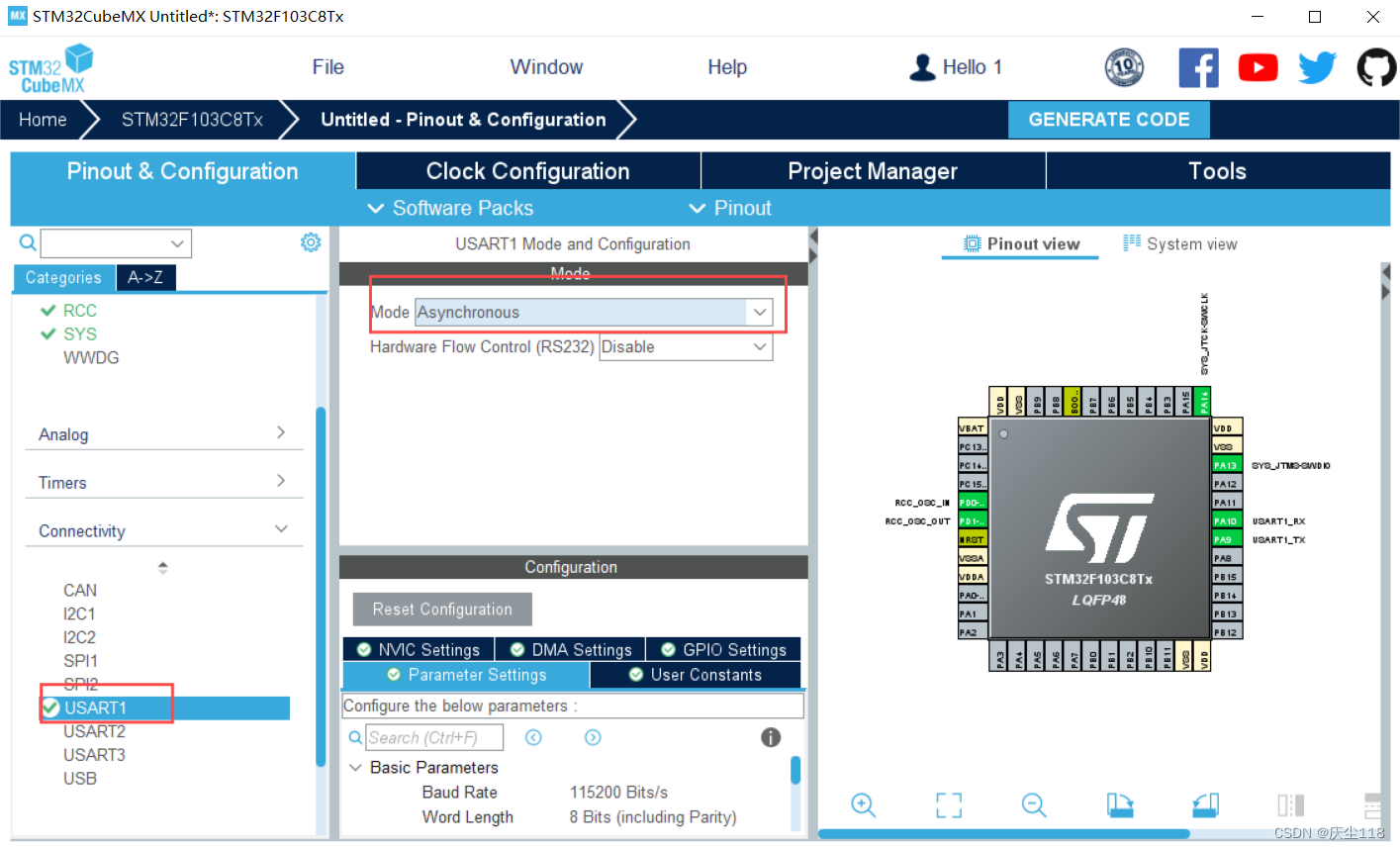
(4)配置串口1
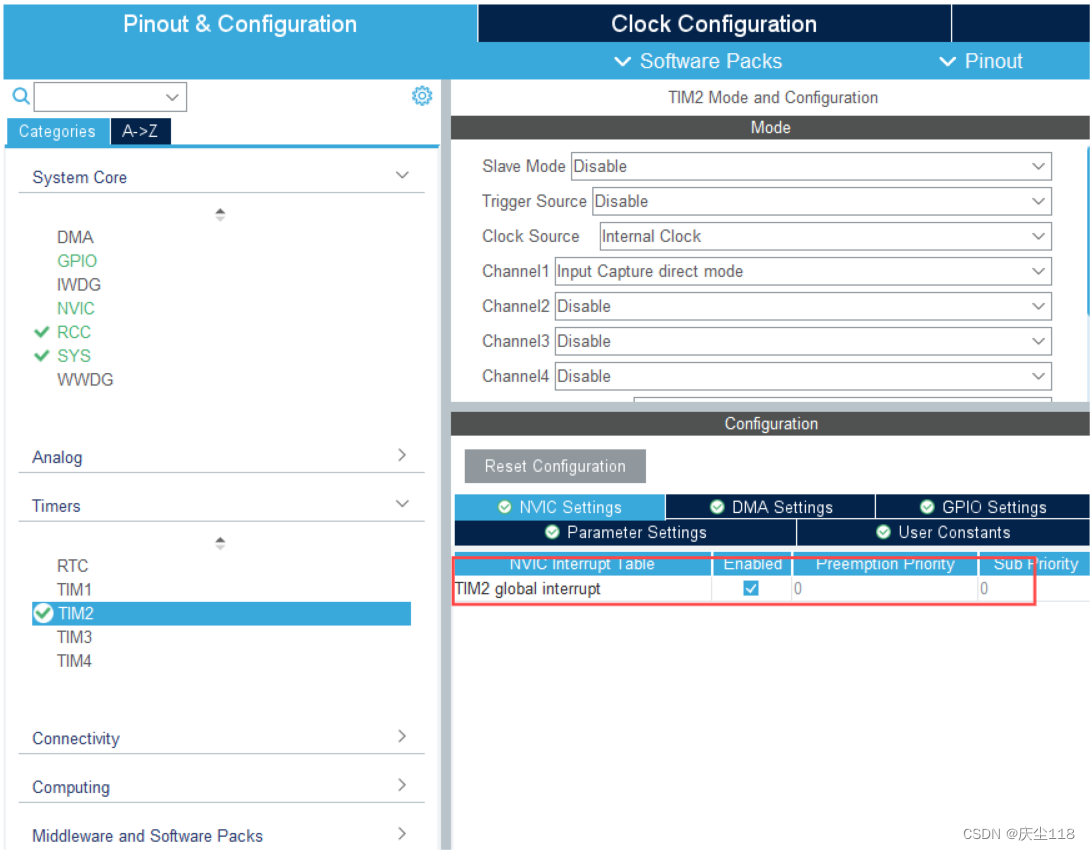
(5)配置定时器

(6)开启定时器中断
(7)设置路径,生成代码工程
三、Keil5代码
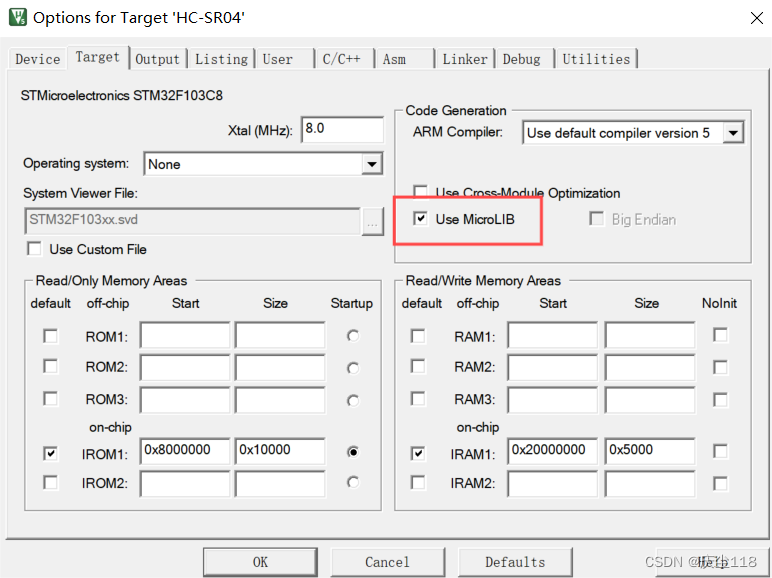
(1)勾选Use MicroLIB
(2)创建SR04.c和SR04.h文件
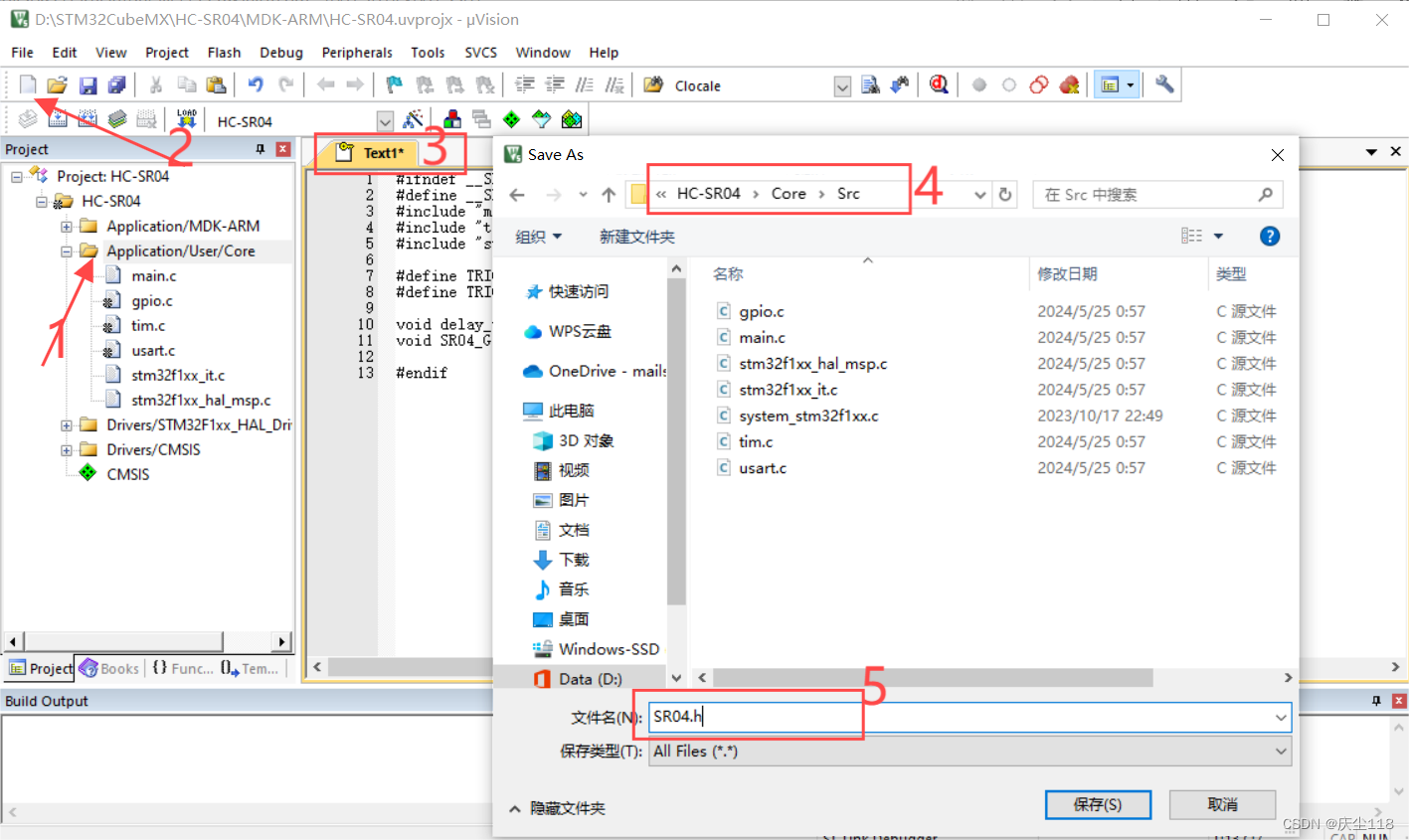
SR04.h文件同上
SR04.c
#include "SR04.h"float distant; //测量距离
uint32_t measure_Buf[3] = {0}; //存放定时器计数值的数组
uint8_t measure_Cnt = 0; //状态标志位
uint32_t high_time; //超声波模块返回的高电平时间//===============================================读取距离
void SR04_GetData(void)
{
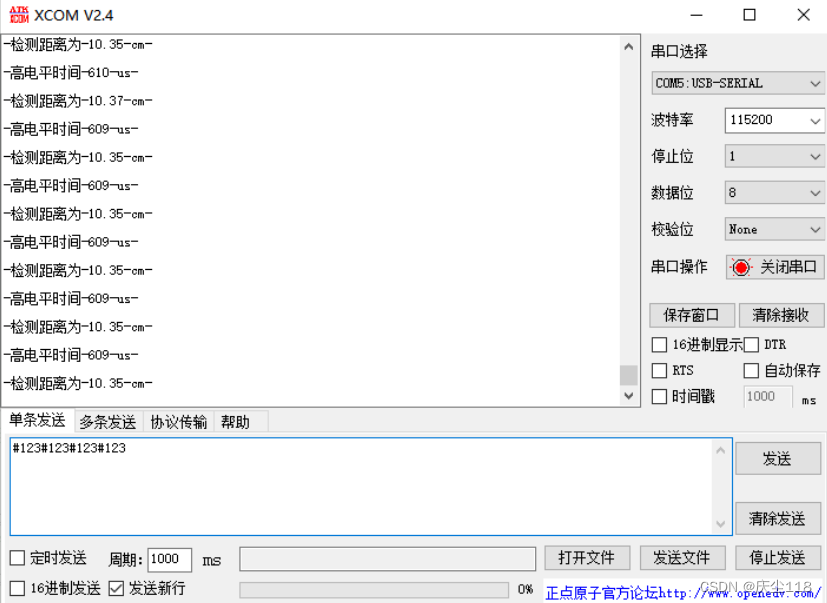
switch (measure_Cnt){case 0:TRIG_H;delay_us(30);TRIG_L;measure_Cnt++;__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); //启动输入捕获 或者: __HAL_TIM_ENABLE(&htim5); break;case 3:high_time = measure_Buf[1]- measure_Buf[0]; //高电平时间printf("\r\n----高电平时间-%d-us----\r\n",high_time); distant=(high_time*0.034)/2; //单位cmprintf("\r\n-检测距离为-%.2f-cm-\r\n",distant); measure_Cnt = 0; //清空标志位TIM2->CNT=0; //清空计时器计数break;}
}//===============================================us延时函数void delay_us(uint32_t us)//主频72M
{uint32_t delay = (HAL_RCC_GetHCLKFreq() / 4000000 * us);while (delay--){;}
}//===============================================中断回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//
{if(TIM2 == htim->Instance)// 判断触发的中断的定时器为TIM2{switch(measure_Cnt){case 1:measure_Buf[0] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.__HAL_TIM_SET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING); //设置为下降沿捕获measure_Cnt++; break; case 2:measure_Buf[1] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.HAL_TIM_IC_Stop_IT(&htim2,TIM_CHANNEL_1); //停止捕获 或者: __HAL_TIM_DISABLE(&htim5);measure_Cnt++; }}}
SR04.h
#ifndef __SR04_H #define __SR04_H #include "main.h" #include "tim.h" #include "stdio.h"#define TRIG_H HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_SET) #define TRIG_L HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_RESET)void delay_us(uint32_t us); void SR04_GetData(void);#endif
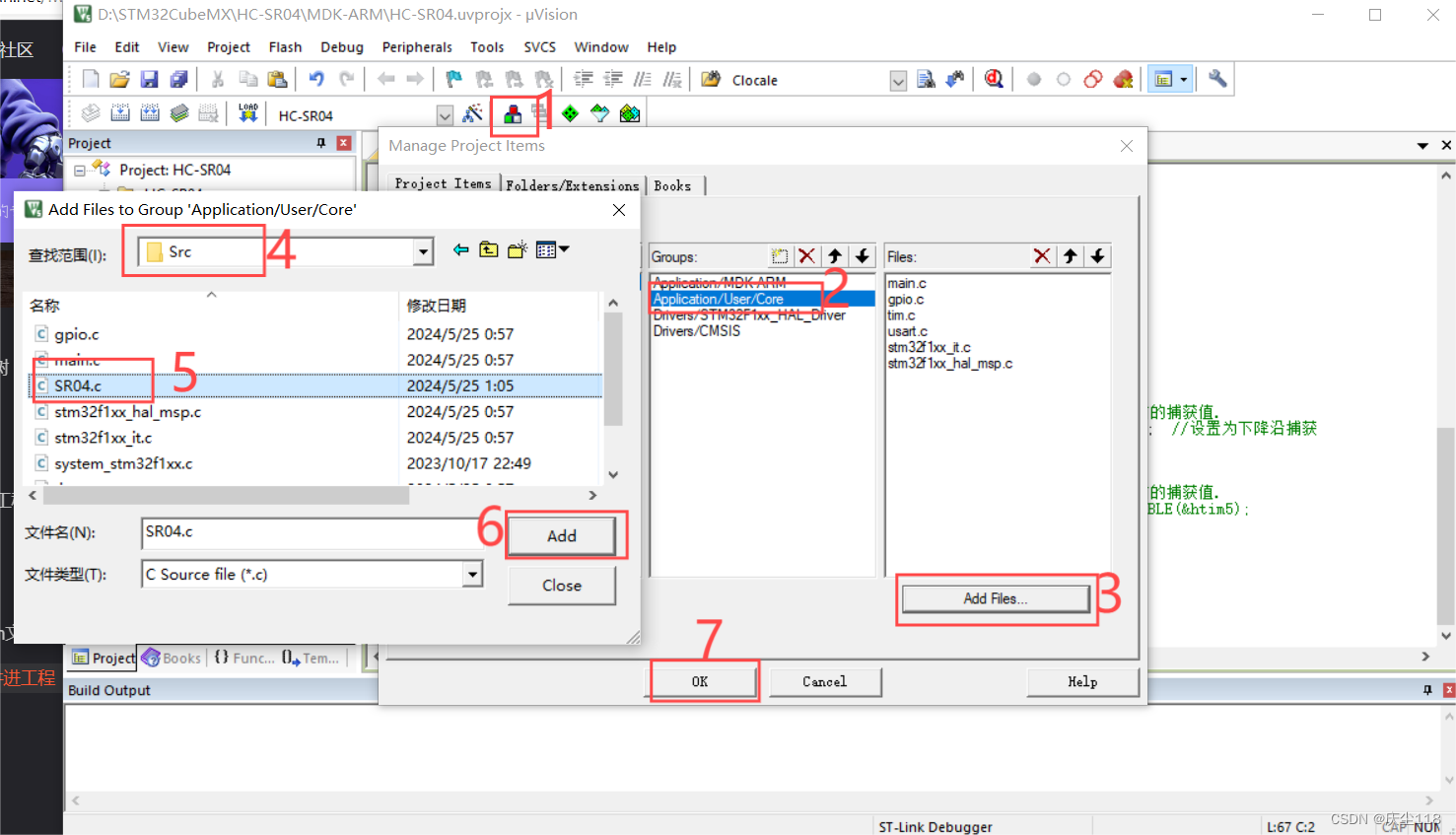
(3)将SR04.c添加进工程
(4)usart.c代码添加
/* USER CODE BEGIN 0 */
#include "stdio.h"
/* USER CODE END 0 *//* USER CODE BEGIN 1 */
/*********************************************************
*
*重定义 fputc 函数
*
*********************************************************/
int fputc(int ch,FILE *f)
{HAL_UART_Transmit (&huart1 ,(uint8_t *)&ch,1,HAL_MAX_DELAY );return ch;
}
/* USER CODE END 1 */
(5)main函数
#include "SR04.h"int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){SR04_GetData( );HAL_Delay(1500);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
四、编译
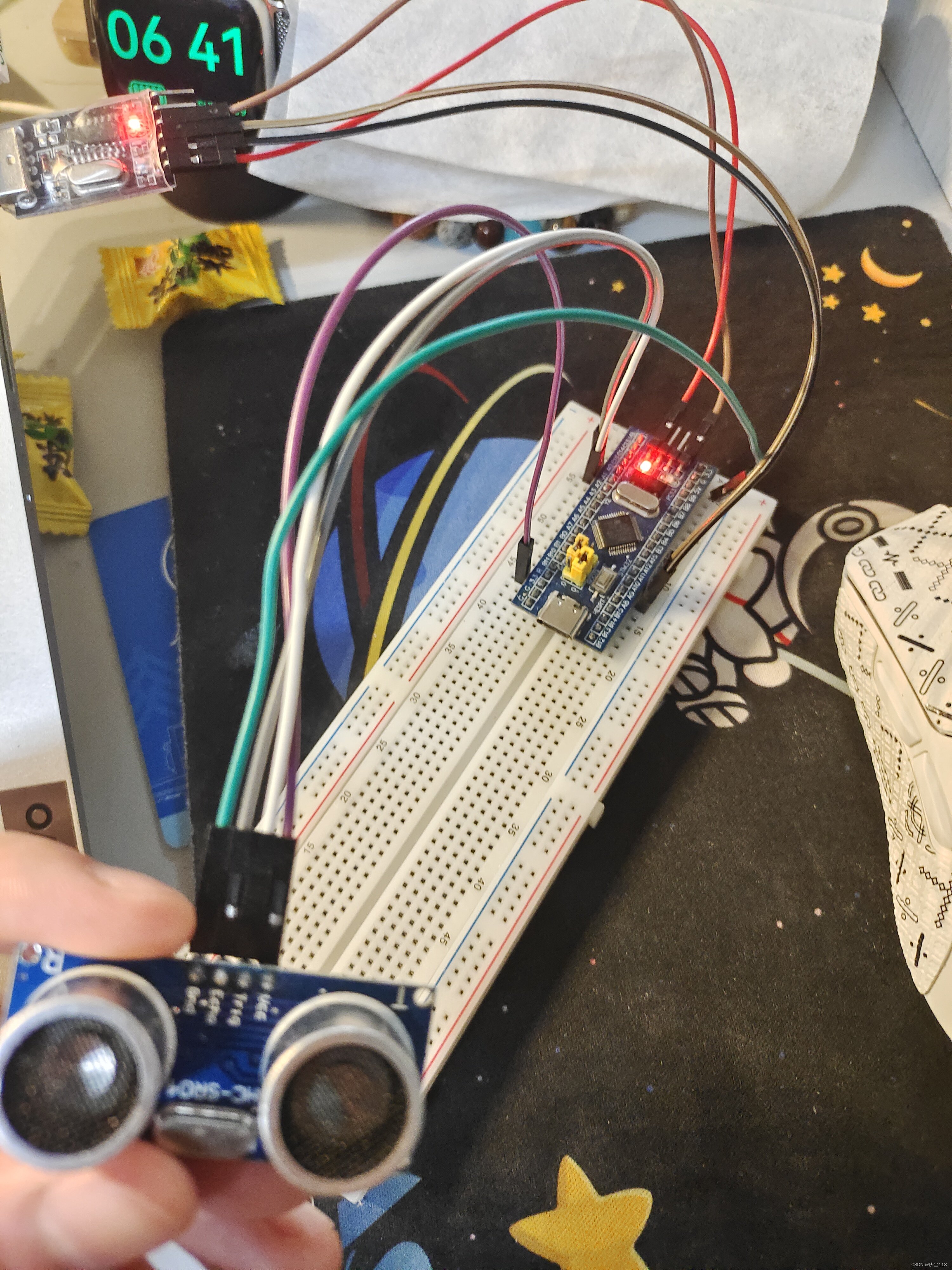
五、接线图及效果