多输入多输出非线性对象的模型预测控制—Matlab实现
本示例展示了如何在 Simulink 中设计多输入多输出对象的闭环模型预测控制。该对象有三个操纵变量和两个测量输出。
一、非线性对象的线性化
运行该示例需要同时安装 Simulink 和 Simulink Control Design。
% 检查是否同时安装了 Simulink 和 Simulink Control Design
if ~mpcchecktoolboxinstalled('simulink')disp('运行此示例需要 Simulink(R)')return
end
if ~mpcchecktoolboxinstalled('slcontrol')disp('运行此示例需要Simulink Control Design(R)')return
end
1、打开非线性 Simulink 模型
open('mpc_nonlinmodel')
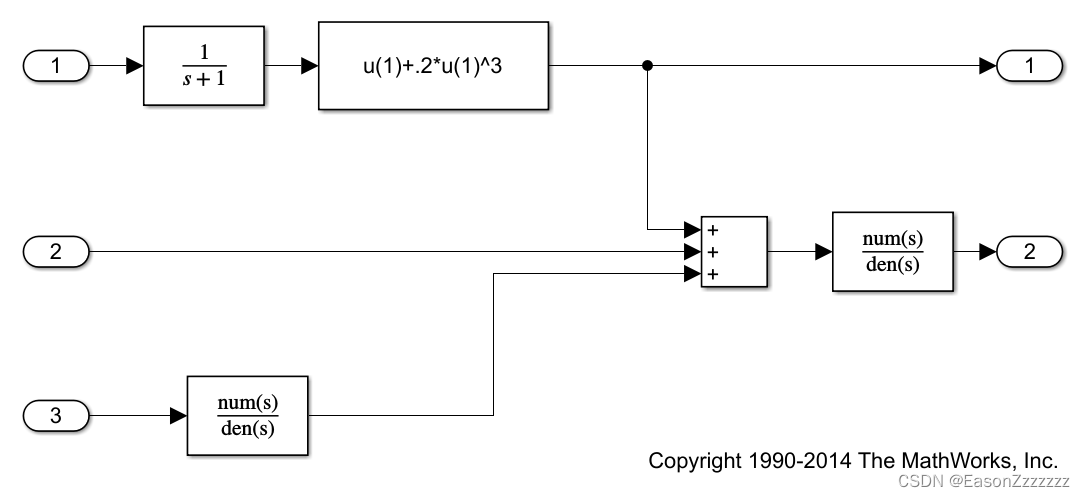
2、使用 Simulink 控制设计工具箱中的线性命令,在默认操作条件下(传递函数块的初始状态均为零)对对象进行线性化:
plant = linearize('mpc_nonlinmodel');
l i n e a r i z e \color{red}{linearize} linearize 函数的作用是对Simulink模型或子系统进行线性近似,以状态空间模型的形式返回。
3、输入输出变量名称分配
plant.InputName = {'Mass Flow';'Heat Flow';'Pressure'};
plant.OutputName = {'Temperature';'Level'};
plant.InputUnit = {'kg/s' 'J/s' 'Pa'};
plant.OutputUnit = {'K' 'm'};
注意:由于没有定义任何可测量或不可测量的干扰,也没有定义任何不可测量的输出,因此在根据该模型创建 MPC 控制器时,默认情况下所有的模型输入都被假定为可操作变量,所有的模型输出都被假定为可测量输出。
二、设计模型预测控制器
1、创建控制器对象,其采样周期、预测和控制范围分别为 0.2 秒、5 步和 2 次移动;
mpcobj = mpc(plant,0.2,5,2);
2、设置操作变量的约束
mpcobj.MV = struct('Min',{-3;-2;-2},'Max',{3;2;2},'RateMin',{-1000;-1000;-1000});
3、设置操作变量和输出信号的权重
mpcobj.Weights = struct('MV',[0 0 0],'MVRate',[.1 .1 .1],'OV',[1 1]);
4、查看 mpcobj 属性
mpcobj==>
MPC object (created on 30-May-2024 15:35:11):
---------------------------------------------
Sampling time: 0.2 (seconds)
Prediction Horizon: 5
Control Horizon: 2Plant Model: --------------3 manipulated variable(s) -->| 5 states || |--> 2 measured output(s)0 measured disturbance(s) -->| 3 inputs || |--> 0 unmeasured output(s)0 unmeasured disturbance(s) -->| 2 outputs |--------------
Disturbance and Noise Models:Output disturbance model: default (type "getoutdist(mpcobj)" for details)Measurement noise model: default (unity gain after scaling)Weights:ManipulatedVariables: [0 0 0]ManipulatedVariablesRate: [0.1000 0.1000 0.1000]OutputVariables: [1 1]ECR: 100000State Estimation: Default Kalman Filter (type "getEstimator(mpcobj)" for details)Constraints:-3 <= Mass Flow (kg/s) <= 3, -1000 <= Mass Flow/rate (kg/s) <= Inf, Temperature (K) is unconstrained-2 <= Heat Flow (J/s) <= 2, -1000 <= Heat Flow/rate (J/s) <= Inf, Level (m) is unconstrained-2 <= Pressure (Pa) <= 2, -1000 <= Pressure/rate (Pa) <= Inf
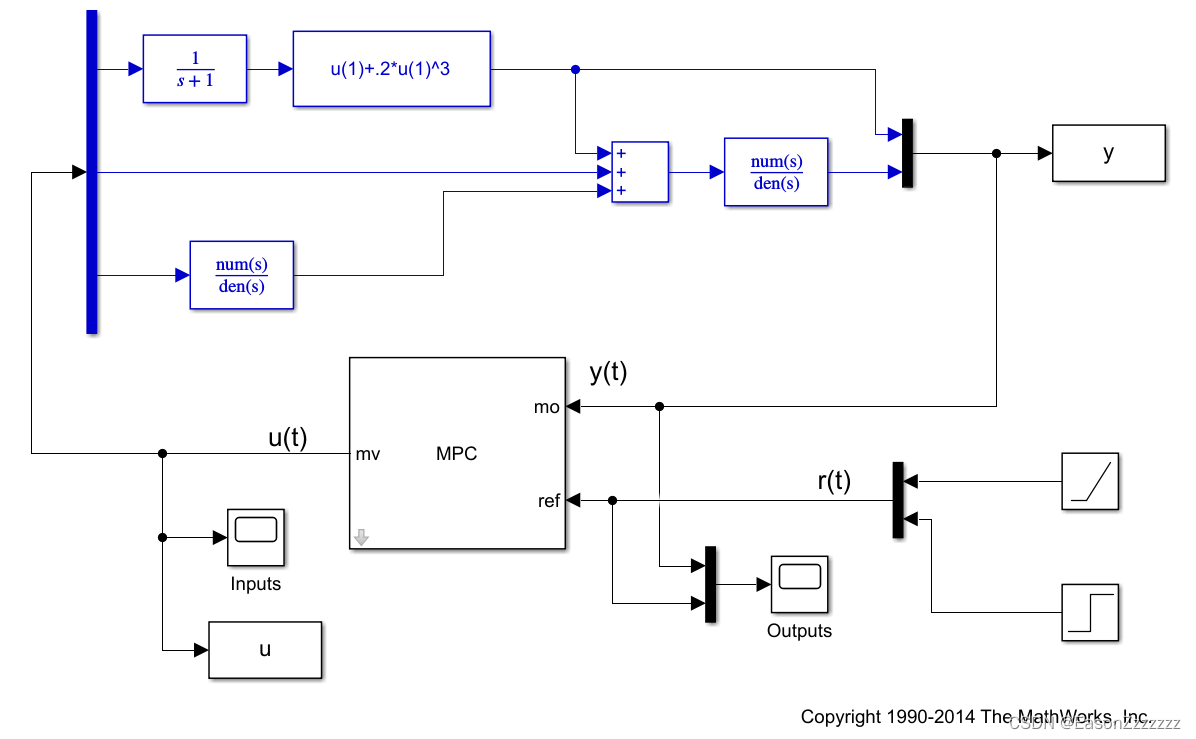
三、使用 Simulink 进行闭环仿真
1、打开闭环仿真模型
mdl1 = 'mpc_nonlinear';
open_system(mdl1)
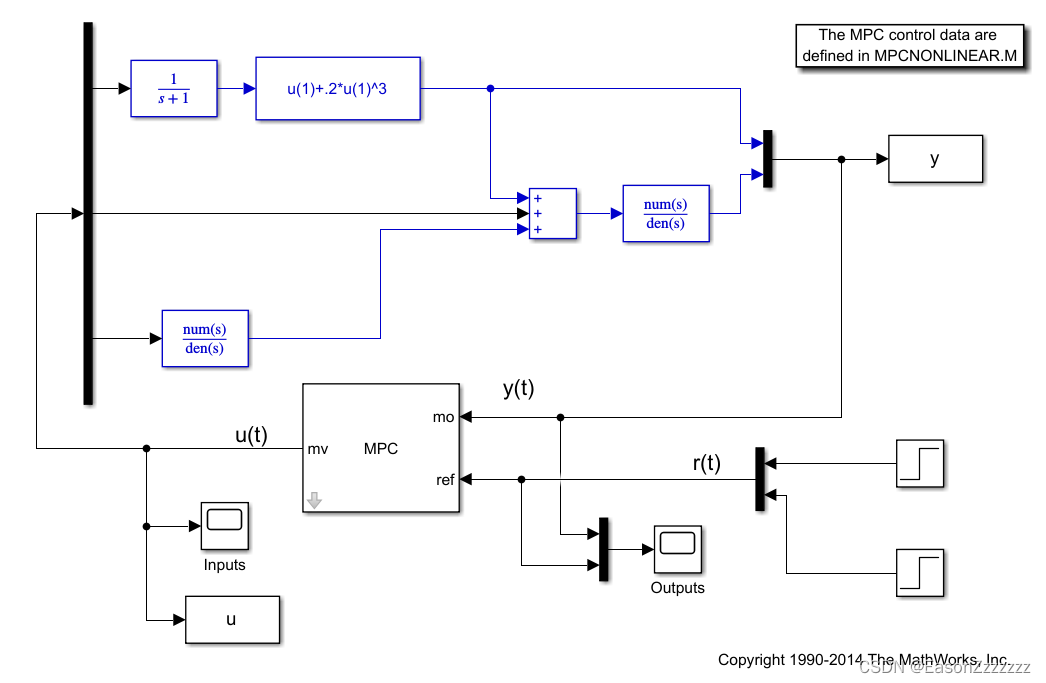
2、闭环仿真
sim(mdl1)-->Converting model to discrete time.
-->Assuming output disturbance added to measured output channel #1 is integrated white noise.
-->Assuming output disturbance added to measured output channel #2 is integrated white noise.
-->The "Model.Noise" property is empty. Assuming white noise on each measured output.
3、运行结果如下图所示:
Input:
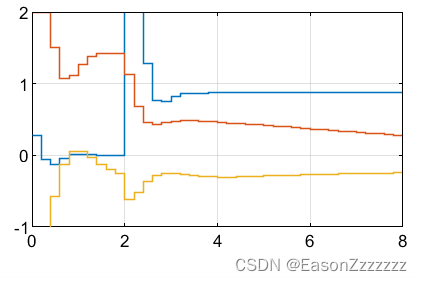
Output:
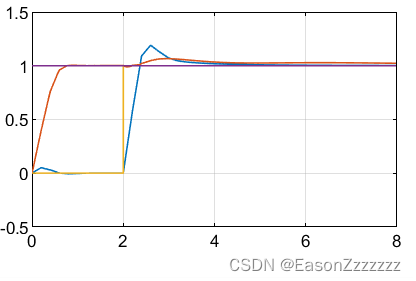
尽管存在非线性,但几秒钟后,两个输出都能很好地跟踪其参考值,同时,正如预期的那样,被操纵的变量保持在预设的硬约束内。
四、修改MPC设计跟踪斜坡信号
为了既能跟踪斜坡,又能补偿非线性,可将两个输出端上的干扰模型定义为三重积分器(如果没有非线性,则使用双积分器即可)。
1、通过 tf 函数构造一个外部扰动模型outdistmodel:
2、通过 setoutdist 函数将上面构造的不可观测外部扰动传递函数 outdistmodel 添加到 MPC 的 model 中:
outdistmodel = tf({1 0; 0 1}, {[1 0 0 0], 1; 1, [1 0 0 0]});
setoutdist(mpcobj,'model',outdistmodel);
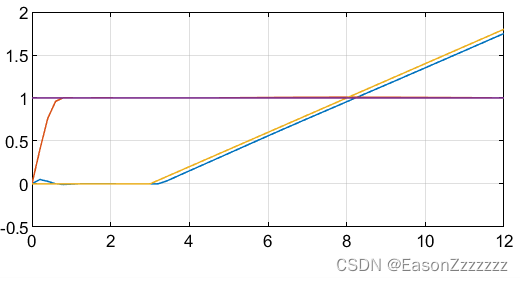
3、打开Simulink中的闭环仿真模型 mpc_nonlinear_setoutdist,它与上面的 mpc_nonlinear 闭环 Simulink 仿真模型相同,唯一不同的是参考信号,其参考信号的第一个由阶跃变为3秒以内以0.2斜率上升的斜坡信号。
4、闭环仿真12s
sim(mdl2, 12)
5、仿真结果如下图所示:
Input:
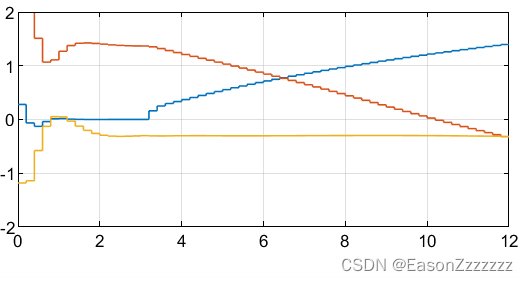
Output: