K210视觉识别模块学习笔记1:第一个串口程序_程序烧录与开机启动
今日开始学习K210视觉识别模块:简单的认识与串口程序
既然K210作为一个视觉识别外设模块来使用,我认为第一个程序 就没必要学点灯之类的了,直接学习串口如何配置开始为妥,毕竟后面都要用到.....
在研究过程中也发现K210程序的烧录与启动也与一般的Openmv不太一样,比较麻烦......
目录
K210产品认识与简介:
CAN_IDEK开发界面:
开发环境的配置:
串口接线与提示:
1、注意K210有俩个串口连接:USB串口与 外扩串口:
2、外置串口的接线:
CanMV IDE 编写串口发送例程:
1、新建Python工程与测试步骤:
2、测试效果截图与解释:
3、例程测试提示:
开机启动程序 与 Py库文件导入K210 TF卡:
Py库文件导入K210 TF卡:
1、不借助读卡器:
2、借助读卡器:
网上查阅资料贴出:
K210产品认识与简介:
该处解释来自于文档:K210视觉识别模块简介.pdf
1.按键K1 : 硬件连接到 IO16 ,可自定义按键功能。
2.RGB 灯: 可编程显示红、绿、蓝、白等颜色。3.TF 卡槽: 用于插入 TF 卡,金手指朝向模块,保存程序和模型等文件。4. 固定铜柱: 总共四个固定铜柱, M3 尺寸。5.K210 核心模组: 包含 K210 芯片最小运行系统。6. 摄像头: 采集图像。7. 模组接口: 连接 K210 核心模组和底板。8.RST 按键: 复位按键,用于重启 K210 芯片。9. 外扩串口: 连接其他串口设备,输出自定义数据。10.microUSB 接口:下载固件、串口调试、连接 IDE 等。11.CH340 芯片: 与 microUSB 接口连接,将 USB 信号转化成 TTL 信号。
CAN_IDEK开发界面:
①菜单栏: 操作文件,使用工具等。②快捷按钮: 区域①中的 文件 和 编辑 中部分功能的快捷方式。③连接设备: 连接设备和程序控制按钮。④代码编辑区:编辑要运行的代码。⑤串行终端: 显示串口打印的调试信息。⑥图像预览: 显示摄像头的图像预览。⑦固件信息: 显示连接的串口号以及固件的相关信息。

开发环境的配置:
检查电脑是否有以下环境:
1、CH340的驱动安装
2、下载CAN_IDE上位机开发软件:https://github.com/kendryte/canmv_ide/releases
(注意找到适合自己系统的进行下载!)
3、烧录出厂固件
4、MicroPython API说明文档
https://developer.canaan-creative.com/index.html?channel=developer#/word

串口接线与提示:
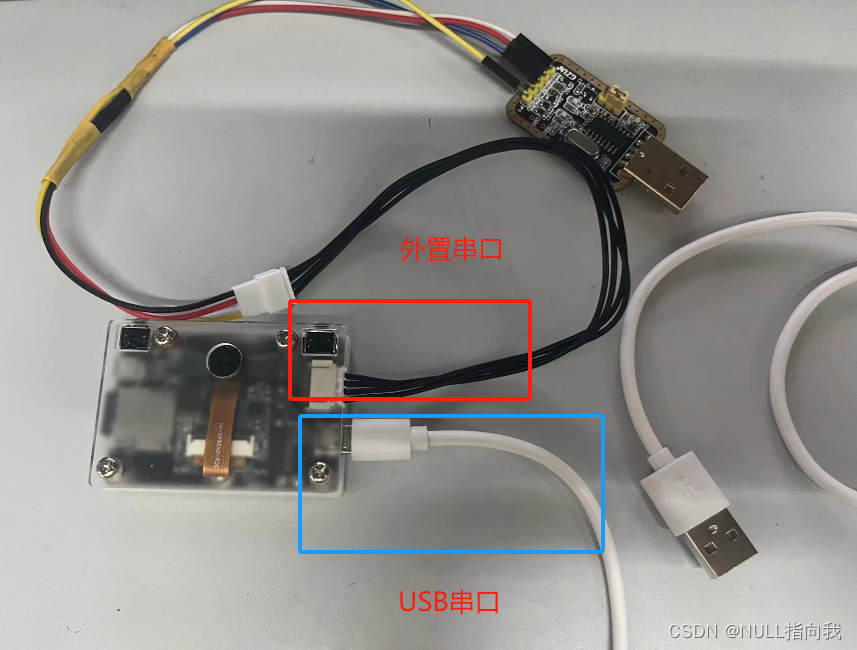
1、注意K210有俩个串口连接:USB串口与 外扩串口:
它俩不是同一个串口,如果在python程序中进行编程输出打印,一个需要调用串口库并创建串口通信的实例对象,另一个可以直接调用Print(“ ”)进行打印:
有关程序部分下面编程部分会进行提示
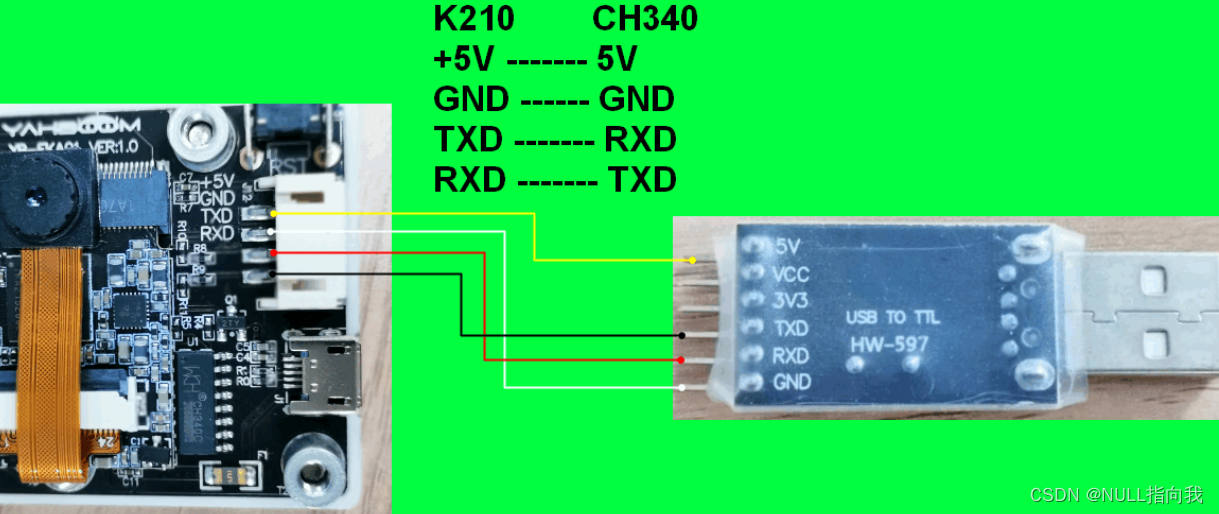
2、外置串口的接线:
3、
CanMV IDE 编写串口发送例程:
1、新建Python工程与测试步骤:
首先在IDE中新建文件:
编写一个串口测试程序如下:
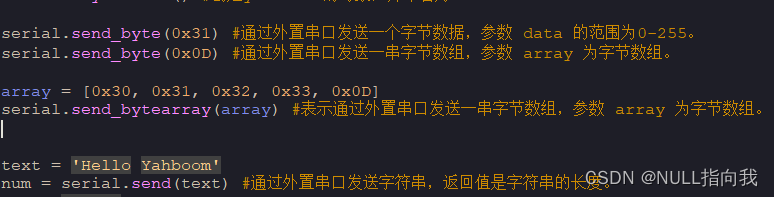
from modules import ybserial #从modules导入ybserial import timeserial = ybserial() #创建ybserial的对象,并命名为serialserial.send_byte(0x31) #通过外置串口发送一个字节数据,参数 data 的范围为0-255。 serial.send_byte(0x0D) #通过外置串口发送一串字节数组,参数 array 为字节数组。array = [0x30, 0x31, 0x32, 0x33, 0x0D] serial.send_bytearray(array) #表示通过外置串口发送一串字节数组,参数 array 为字节数组。text = 'Hello Yahboom' num = serial.send(text) #通过外置串口发送字符串,返回值是字符串的长度。 print("num:", num)num = 0 # count = 0 #记录串口发送次数 #用于交替发送测试的俩个字符串 CMD_1 = "$A#" CMD_2 = "$BB#"while True:time.sleep_ms(1000)count = count + 1if count % 2 == 1:num = serial.send(CMD_1)else:num = serial.send(CMD_2)print("num:%d, count:%d" % (num, count))然后进行保存:
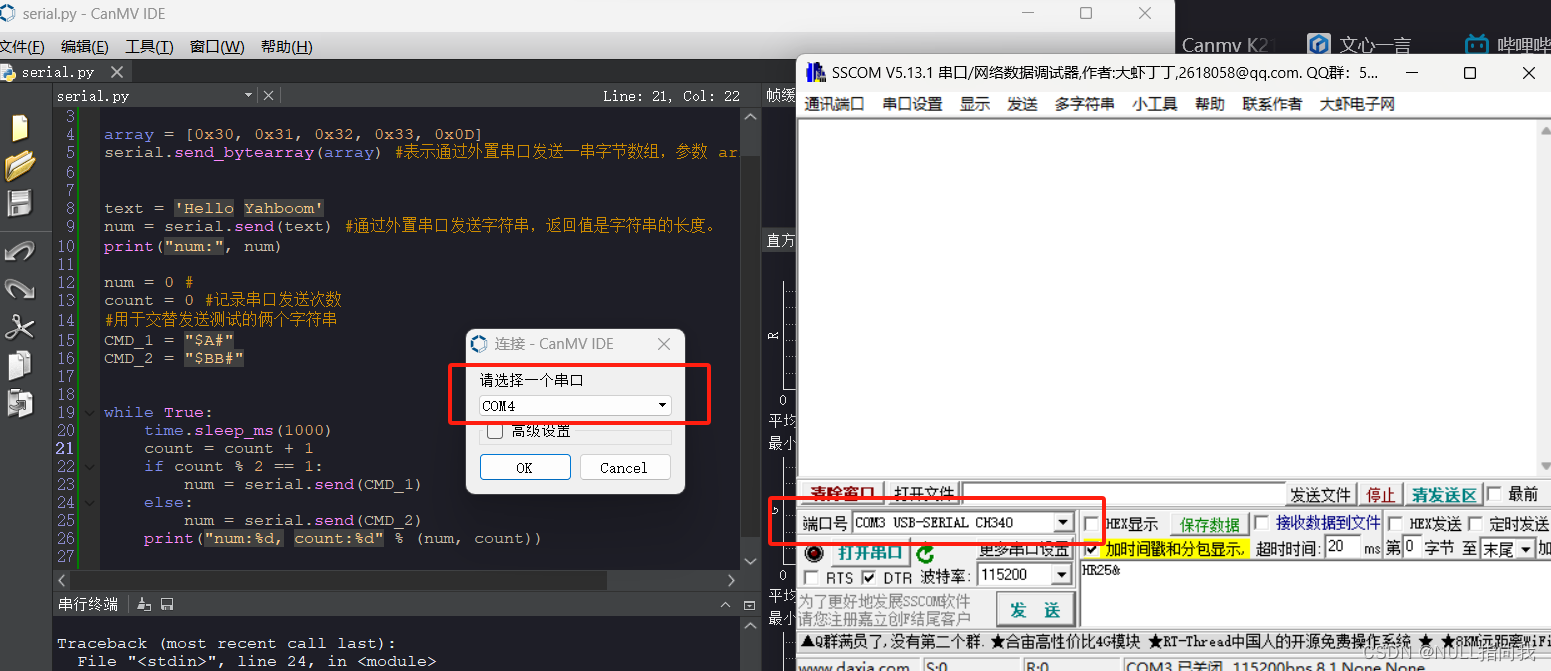
然后连接俩个串口到电脑俩个串口:
然后打开一个额外的串口助手:
这里需要注意的是,要记得自己USB与外置串口分别连接了电脑的那个com口,我这里USB调试串口是连接的com 4,外置串口连接的是com 3,因此我这俩个软件打开的串口应如下:
然后按三角就可以进行测试了:



2、测试效果截图与解释:
从测试结果发现:
1、外设串口打印相关的函数如下:
2、USB串口打印相关函数如下:


3、例程测试提示:
这仅仅是将一个Python程序下载测试了一下,程序并未永久进入K210的内存!
断电后再连接,程序就会丢失!!!
请继续阅读下文可以解决这个疑问......
开机启动程序 与 Py库文件导入K210 TF卡:
开发板上电后会 自动执行 boot文件,然后再执行该处的 main.py,如果想让自己的程序开机自启动,可以将程序拷贝到boot中或者写入main.py。
SD卡在上电后会被挂载到/sd,值得注意的是只能将数据写入/flash和/sd下。
Python是支持将自定义py库(或者第三方py库)放到同一个目录下调用的,MicroPython也是支持调用自定义py库的。在调用自定义py库之前,需要提前将py库文件导入K210。
Py库文件导入K210 TF卡:
主流分为俩种方式:
1、不借助读卡器:
在不拔出K210侧边挂载的TF卡的情况下使用CanMV IDE 进行导入:
需要我们先 连接好K210 在导入:
我们可以看到除了保存文件到CanMV Cam选项外(这个适合导入第三方库)
还有其余俩个选项:
其中如果选择了第二个选项(main.py)那就是能够使得这个Python程序开机自启动的!
别忘记保存成功后需要按下复位键!
2、借助读卡器:
借助读卡器的导入法更为简单粗暴,并且可操作性也更强,对于其中各个文件的把握也更全面.....

网上查阅资料贴出:
K210系列第一个示例程序-CSDN博客
K210-调用自定义py库_k210如何调用自定义py库-CSDN博客
K210——UART串口通信_k210串口-CSDN博客