光学传感器图像处理流程(一)
光学传感器图像处理流程(一)
- 1. 处理流程总览
- 2. 详细处理流程
- 2.1. 图像预处理
- 2.1.1. 降噪处理
- 2.1.2. 薄云处理
- 2.1.3. 阴影处理
- 2.2. 辐射校正
- 2.2.1. 辐射定标
- 2.2.2. 大气校正
- 2.2.3. 地形校正
- 2.3. 几何校正
- 2.3.1. 图像配准
- 2.3.2. 几何粗校正
- 2.3.3. 几何精校正
- 2.3.4. 正射校正
1. 处理流程总览

2. 详细处理流程
2.1. 图像预处理
2.1.1. 降噪处理
由于传感器的因素,一些获取的遥感图像中,会出现周期性的噪声,我们必须对其进行消除或减弱方可使用。
(1) 消除周期性噪声和尖锐性噪声
周期性噪声一般重叠在原图像上,成为周期性的干涉图形,具有不同的幅度、频率、和相位。它形成一系列的尖峰或者亮斑,代表在某些空间频率位置最为突出。一般可以用带通或者槽形滤波的方法来消除。
消除尖峰噪声,特别是与扫描方向不平行的,一般用傅立叶变换进行滤波处理的方法比较方便。

(2) 除坏线和条带
去除遥感图像中的坏线。遥感图像中通常会出现与扫描方向平行的条带,还有一些与辐射信号无关的条带噪声,一般称为坏线。一般采用傅里叶变换和低通滤波进行消除或减弱。

2.1.2. 薄云处理
由于天气原因,对于有些遥感图形中出现的薄云需要进行检测和减弱处理。
2.1.3. 阴影处理
由于太阳高度角的原因,有些图像会出现山体阴影,可以采用比值法对其进行消除。
2.2. 辐射校正
2.2.1. 辐射定标
定义:建立遥感传感器的数字量化输出值DN与其所对应视场中辐射亮度值之间的定量关系。
目的:消除传感器本身的误差,确定传感器入口处的准确辐射值,即将记录的原始DN值转换为大气层顶反射率。
定标方法包括:实验室定标、机上/星上定标、场地定标。
不同的传感器,其DN值转换为辐亮度公式不同:Landsat系列卫星采用L=Gain*DN+Bias,环境星采用公式L= DN/Gain+Bias。
2.2.2. 大气校正
将辐亮度或者表面反射率转换为地表实际反射率。其目的是:消除大气散射、吸收、反射引起的误差。大气校正是遥感影像辐射校正的主要内容。
目前主要的校正方法分为基于图像特征和大气辐射传输模型方法,如6S、MODTRAN等。后者比较复杂。一般而言:
(1) 如果是精细定量研究,选择基于辐射传输模型的大气校正方法。
(2) 如果是做动态监测,两者皆可。
(3) 如果缺少相应的大气等参数,只能选择较简单的方法。

2.2.3. 地形校正
消除地形起伏带给遥感影像的影响。主要方法有C校正、COS校正、SCS校正、SCS+C校正等。

2.3. 几何校正
通常我们获取的遥感影像一般都是L2级产品,为使其定位准确,我们在使用遥感图像前,必须对其进行几何精纠正等操作,在地形起伏较大地区,还必须对其进行正射纠正。
2.3.1. 图像配准
为同一地区的两种数据源能在同一个地理坐标系中进行叠加显示和数学运算,必须先将其中一种数据源的地理坐标配准到另一种数据源的地理坐标上,这个过程叫做配准。
(1)影像对栅格图像的配准
将一幅遥感影像配准到相同地区另一幅影像或栅格地图中,使其在空间位置能重合叠加显示。

(2)影像对矢量图形的配准
将一幅遥感影像配准到相同地区一幅矢量图形中,使其在空间位置上能进行重合叠加显示。
2.3.2. 几何粗校正
几何粗校正是针对引起几何畸变的原因进行的,地面接收站在提供给用户资料前,已按常规处理方案与图像同时接收到的有关运行姿态、传感器性能指标、大气状态、太阳高度角对该幅图像几何畸变进行相应校正。
2.3.3. 几何精校正
为准确对遥感数据进行地理定位,需要将遥感数据准确定位到特定的地理坐标系的,这个过程称为几何精纠正。
(1)图像对图像的纠正
利用已有准确地理坐标和投影信息的遥感影像,对原始遥感影像进行纠正,使其具有准确的地理坐标和投影信息。
(2)图像对地图(栅格或矢量)
利用已有准确地理坐标和投影信息的扫描地形图或矢量地形图,对原始遥感影像进行纠正,使其具有准确的地理坐标和投影信息。

(3)图像对已知坐标点(地面控制点)
利用已有准确地理坐标和投影信息的已知坐标点或地面控制点,对原始遥感影像进行纠正,使其具有准确的地理坐标和投影信息。
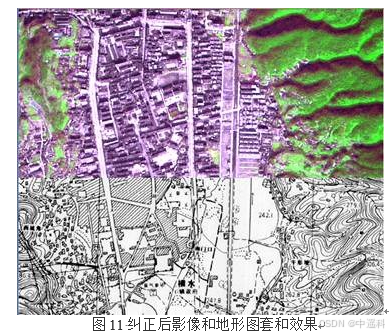
2.3.4. 正射校正
利用已有地理参考数据(影像、地形图和控制点等)和数字高程模型数据(DEM),对原始遥感影像进行纠正,可消除或减弱地形起伏带来的影像变形,使得遥感影像具有准确的地面坐标和投影信息。