图像条纹检测 python_预告:面向强反射表面的多传感器三维检测技术研究
 摘 要
摘 要
光学三维检测技术具有非接触、高效率、高精度等优点,该技术广泛应用于在工业检测、农业生产、航空航天、气象等领域。随着模式识别、图像处理等技术的不断发展,光学三维检测技术的应用领域也在不断扩大。在工业检测过程中,为了满足不同的检测要求,需要开发不同类型的光学三维检测系统。本文基于光学三维检测原理,对多传感器三维检测系统在检测过程中存在的一些关键问题进行了详细的分析与解决。本文主要对以下几个方面进行了研究:
( 1) 针对单视觉传感器检测存在的局限性问题,设计一种多传感器三维检测系统。该系统通过多个摄像机对多个特征进行检测,解决了单视觉传感器视野局限以及效率低的问题。
( 2) 根据多传感器三维检测系统中各个视觉传感器的位置关系,提出一种坐标系统一化的全局标定方法。该方法通过坐标系之间的转换,将三维检测数据统一到同一个坐标系中,并对全局标定的结果进行优化。
( 3) 针对激光三维检测过程中金属表面高光现象对后续检测带来的干扰问题,提出一种峰值连续性检测的方法,并进行实验验证。结果表明,相对于一般细化处理的重建结果,高光处理后的重建精度可提高近 50%。
( 4) 提出一种基于全局的像素级别中心提取方法和基于方向图的亚像素级别中心提取方法。首先通过横向和纵向的双重搜索对光条纹进行初次提取;然后通过计算方向信息对光条纹进行精确提取;最后介绍了常见特征及其检测方法。
( 5) 搭建系统实验平台,使用 VC++2008 软件编写算法程序,对本文中的算法进行实验验证。
关键词:光学三维检测,多传感器三维检测,全局标定,高光处理,中心线提取
| 研究生姓名 学科、专业 研 究 方 向 指 导 教 师 | 张磊 机械电子工程 机电控制及自动化 程筱胜 教授 |
在学期间的研究成果及发表的学术论文
攻读硕士学位期间发表(录用)论文情况
1、张磊,程筱胜,崔海华,戴宁,裴旭.面向高光金属表面的激光三维检测算法[J].光电技术应
用,2013,28(6):44-48.
攻读硕士学位期间参加科研项目情况
1、 江苏省数字化制造重点实验室开放课题基金
项目名称:面向强反射表面的多传感器三维检测技术研究
时间:2011年9月-2013年12月
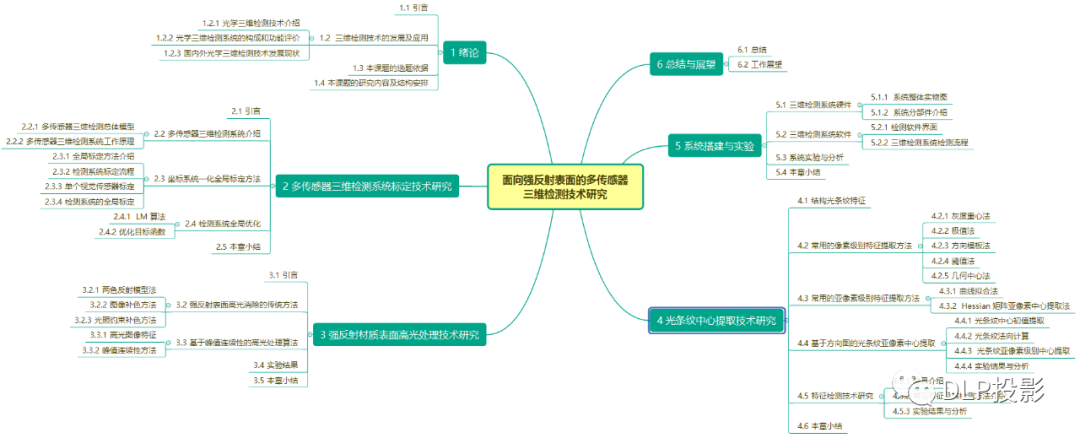
总体大纲
1 绪论
1.1 引言
1.2 三维检测技术的发展及应用
1.2.1 光学三维检测技术介绍
1.2.2 光学三维检测系统的构成和功能评价
1.2.3 国内外光学三维检测技术发展现状
1.3 本课题的选题依据
1.4 本课题的研究内容及结构安排
2 多传感器三维检测系统标定技术研究
2.1 引言
2.2 多传感器三维检测系统介绍
2.2.1 多传感器三维检测总体模型 2.2.2 多传感器三维检测系统工作原理2.3 坐标系统一化全局标定方法
2.3.1 全局标定方法介绍 2.3.2 检测系统标定流程 2.3.3 单个视觉传感器标定 2.3.4 检测系统的全局标定2.4 检测系统全局优化
2.4.1 LM 算法 2.4.2 优化目标函数2.5 本章小结
3 强反射材质表面高光处理技术研究
3.1 引言
3.2 强反射表面高光消除的传统方法
3.2.1 两色反射模型法 3.2.2 图像补色方法 3.2.3 光照约束补色方法3.3 基于峰值连续性的高光处理算法
3.3.1 高光图像特征 3.3.2 峰值连续性方法3.4 实验结果
3.5 本章小结
4 光条纹中心提取技术研究
4.1 结构光条纹特征
4.2 常用的像素级别特征提取方法
4.2.1 灰度重心法 4.2.2 极值法 4.2.3 方向模板法 4.2.4 阈值法 4.2.5 几何中心法4.3 常用的亚像素级别特征提取方法
4.3.1 曲线拟合法 4.3.2 Hessian 矩阵亚像素中心提取法4.4 基于方向图的光条纹亚像素中心提取
4.4.1 光条纹中心初值提取 4.4.2 光条纹法向计算 4.4.3 光条纹亚像素级别中心提取 4.4.4 实验结果与分析4.5 特征检测技术研究
4.5.1 背景介绍 4.5.2 常见特征及其检测方法介绍 4.5.3 实验结果与分析4.6 本章小结
5 系统搭建与实验
5.1 三维检测系统硬件
5.1.1 系统整体实物图 5.1.2 系统分部件介绍5.2 三维检测系统软件
5.2.1 检测软件界面 5.2.2 三维检测系统检测流程5.3 系统实验与分析
5.4 本章小结
6 总结与展望
6.1 总结
6.2 工作展望

更多问题,可以加微信咨询。
添加时务必备注”称呼+单位信息+DLP公众号“,否则不予通过。
