V-SLAM 回环检测与后端优化重读
研究背景: 后端优化原理大多人都比较清楚,但是实现起来不是个容易的事情,而回环检测部分在自己测试之后发现,这部分在vSLAM中也是至关重要的,本文的给出了在没有好的回环下得到的地图样例。
1. 几个坏的回环结果


2. 问题描述
-
误差积累: 相机转过去的过程正常运行,但转回来时会出现明显偏差;
-
点云重建效率:在线点云更新速度较慢, 不实时显示速度影响不大.
3. VO-视觉里程计的问题
- 帧----帧,匹配获取相机位姿

相邻帧匹配计算相机位姿,容易造成误差累计。
- 帧----旧地图,匹配获取相机位姿

理论上较为稳定,因为可以跟之前多个时刻的数据进行对比更新。
- g2o优化相机位姿
这里给出半闲居士博客的一张图供参考(意思是代码实现过程中的函数之间的调用关系):
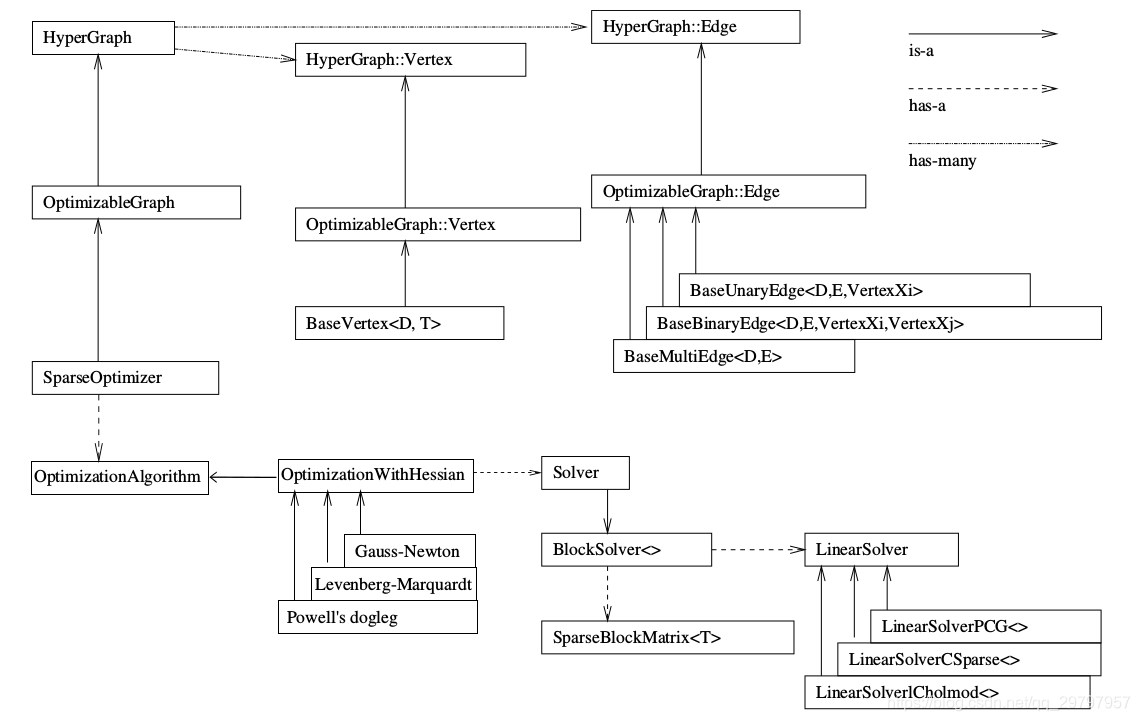
并给出自己对图优化理解一点小笔记:

- g2o程序编写(核心)
// 初始化
g2o::LinearSolverEigen< g2o::BlockSolver_6_3::PoseMatrixType >* linearSolver
= new g2o::LinearSolverEigen< g2o::BlockSolver_6_3::PoseMatrixType >();
g2o::BlockSolver_6_3* blockSolver = new g2o::BlockSolver_6_3(linearSolver);
g2o::OptimizationAlgorithmLevenberg* solver
= new g2o::OptimizationAlgorithmLevenberg( blockSolver );
optimizer.setAlgorithm( solver );
optimizer.setVerbose( false );
// 初始顶点
g2o::VertexSE3* v = new g2o::VertexSE3();
v->setId( cutIndex );
v->setEstimate( Eigen::Isometry3d::Identity() );
v->setFixed( true );
optimizer.addVertex( v )
// 添加新的节点(顶点)
g2o::VertexSE3* vNext = new g2o::VertexSE3();
vNext->setId(currFrame.frameID);
vNext->setEstimate( Eigen::Isometry3d::Identity());
optimizer.addVertex(vNext);
// 添加边的数据
g2o::EdgeSE3* edgeNew = new g2o::EdgeSE3();
edgeNew->setVertex(0, optimizer.vertex(pousFrame.frameID));
edgeNew->setVertex(1, optimizer.vertex(currFrame.frameID));
edgeNew->setRobustKernel( new g2o::RobustKernelHuber() );
//edgeNew->setInformation( Eigen::Matrix2d::Identity()); //the size is worthy to research
// 信息矩阵
// 两个节点的转换矩阵
Eigen::Isometry3d T = cvMat2Eigen( m_result.rotaMatrix, m_result.tranMatrix );
edgeNew->setMeasurement(T);
optimizer.addEdge(edgeNew);
// 开始优化
optimizer.initializeOptimization();
optimizer.optimize(10);
4. 回环检测
前端误差累计,使得长期估计的结果不可靠,无法构建全局一致的地图;
回环检测的目的是检测出相机是否经过同一个地方, 它是保障地图能够在
长时间下正确运行的关键技术。

-
什么时候地图应该检测是否回环?
1.
随机检测:随机抽取部分历史数据进行回环检测,回环几率降低,效率较低;2.
基于里程计的几何关系(Odometry based):累计误差较大时无法工作,且无法正确发现“运动之前某个位置附近”的事实。3.
基于外观的相似性(Appearance based):与前端、后端都无关,仅根据两幅图像的相似性确定是否进行回环检测,这种方法摆脱了累计误差,被广泛应用。 -
如何有效、合理、准确地评估图像之间的相似性?
"感知偏差" "感知变异"
"准确率+ 召回率" 来评判估计图像相似性计算方法的 "好 -- 不好"
- 词袋模型 (bag-of-words) —>
DBoW3
词袋:也就是收藏了很多不同种特征的
词典,当我们需要用到词袋模型时,实际上就是将图像上的特征与词典中收藏的特征进行匹配得分,最后的得分就是评价图像是否相似的标准,也是判断是否可以回环的标准。
1.字典如何使用?
/*
1> 图像中的特征与字典中`words`对应(但不是一一对应),将图像量化成一个包含各种特征的向量.
2> 每个特征在字典中占据不同的权重;
3> 与字典中匹配的特征,只强调是否出现,而无关顺序和位置,只是一个words的集合。
*/
2.如何创建字典?
/*
1> words与一个单独的特征点不同,words是某一类特征的组合;
2> 假如我要创建一个具有k个单词的字典,每个单词就可以看做局部相邻特征点的一个集合,简单的聚类(k-means)方法就可以实现上述功能。
*************************************************************************************************************
3> 一个特征点对应一个单词,一张图像有N个特征点,就会对应N个单词,那么实际上就获取了这张图像重要信息在字典中的分布。
4> 前者是对单词"一视同仁", 然而实际中不同单词重要性不一;
因此需要对单词的区分性和重要性加以评估,赋予单词不同的权重将更有意义。("TF-IDF")
*/
- 特征–words相似性评分
1> 当相似性得分区别不大时,可扩展字典的规模,重新检测;
2> 为使算法适应更多的环境(有很多相似之处的环境, 以及外观有很大差别的环境),给出一个"先验相似度",
将每一个在上一步得到的相似性得分除以这个先验相似度,就可以得到归一化后的分值。
"那么,当当前帧与之前某一个关键帧的分值大于当前帧与上一个关键帧的3倍时, 就认为可能存在回环 !"
- 检测到回环之后的
验证
1> "时间上的一致性检测:" 单次回环不足以构成良好的约束,在一段时间检测到的回环,才认为是正确的回环。
2> "空间上的一致性检测:" 对回环检测到的两个帧进行特征匹配,估计相机运动,然后与之前的位姿图进行对比,检测是否有很大出入。