TinyRenderer学习笔记--Lesson 3、4
Lesson 3 zbuffer
无论怎样,生活中的显示器基本上都是平面,是一个2D的场景,而我们的模型却是3D的,是有深度的,实际上我们看见的都只是离我们的眼睛最近的那一个平面,一个不透明的3D物体的内部和背面是我们无法观测到的。对应到计算机里面,我们就需要知道一个物体哪个平面离我们的虚拟摄像机最近,但是这往往是很难办到的,如下:
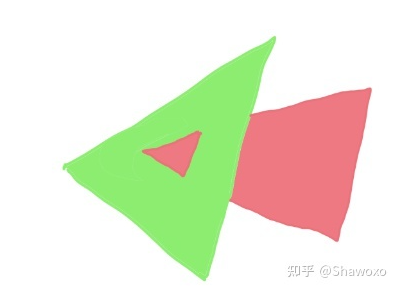
显然,我们无法判断绿色三角形和粉色三角形哪个离平面更近,这时就不能以三角形平面为单位来绘制,需要以像素为单位来绘制。
void triangle(Vec3f* pts, float* zbuffer, TGAImage& image, TGAColor color)
{
//定义包围盒
Vec2f bboxmin(std::numeric_limits<float>::max(), std::numeric_limits<float>::max());
Vec2f bboxmax(-std::numeric_limits<float>::max(), -std::numeric_limits<float>::max());
Vec2f clamp(image.get_width() - 1, image.get_height() - 1);
//找到包围盒
for (int i = 0; i < 3; ++i)
{
for (int j = 0; j < 2; ++j)
{
bboxmin[j] = std::max(0.f, std::min(bboxmin[j], pts[i][j]));
bboxmax[j] = std::min(clamp[j], std::max(bboxmax[j],pts[i][j]));
}
}
Vec3f p;
for (p.x = bboxmin.x; p.x < bboxmax.x; p.x++)
{
for (p.y = bboxmin.y; p.y < bboxmax.y; p.y++)
{
//找到重心坐标并判断判断是否在三角形内
Vec3f bc_screen = barycentric(pts[0], pts[1], pts[2], p);
if (bc_screen.x < 0 || bc_screen.y < 0 || bc_screen.z < 0) continue;
p.z = 0;
//通过重心坐标计算深度值
for (int i = 0; i < 3; i++) p.z += pts[i][2] * bc_screen[i];
if (zbuffer[int(p.x + p.y * width)] < p.z)
{
//更新深度值
zbuffer[int(p.x + p.y * width)] = p.z;
image.set(p.x, p.y, color);
}
}
}
}
.........
Vec3f light_dir(0, 0, -1);
//深度缓冲区,并赋值
float* zbuffer = new float[width * height];
for (int i = width * height; i--; zbuffer[i] = -std::numeric_limits<float>::max());
for (int i = 0; i < model->nfaces(); i++) {
std::vector<int> face = model->face(i);
Vec3f pts[3];
Vec3f world_coords[3];
for (int j = 0; j < 3; ++j)
{
Vec3f v = model->vert(face[j]);
pts[j] = world2screen(model->vert(face[j]));
world_coords[j] = v;
}
Vec3f n = cross((world_coords[2] - world_coords[0]),(world_coords[1] - world_coords[0]));
n.normalize();
float intensity = n * light_dir;//光照强度=法向量*光照方向 即法向量和光照方向重合时,亮度最高
//强度小于0,说明平面朝向为内 即背面裁剪
if (intensity > 0) {
triangle(pts,zbuffer, image, TGAColor(intensity * 255, intensity * 255, intensity * 255, 255));
}
}
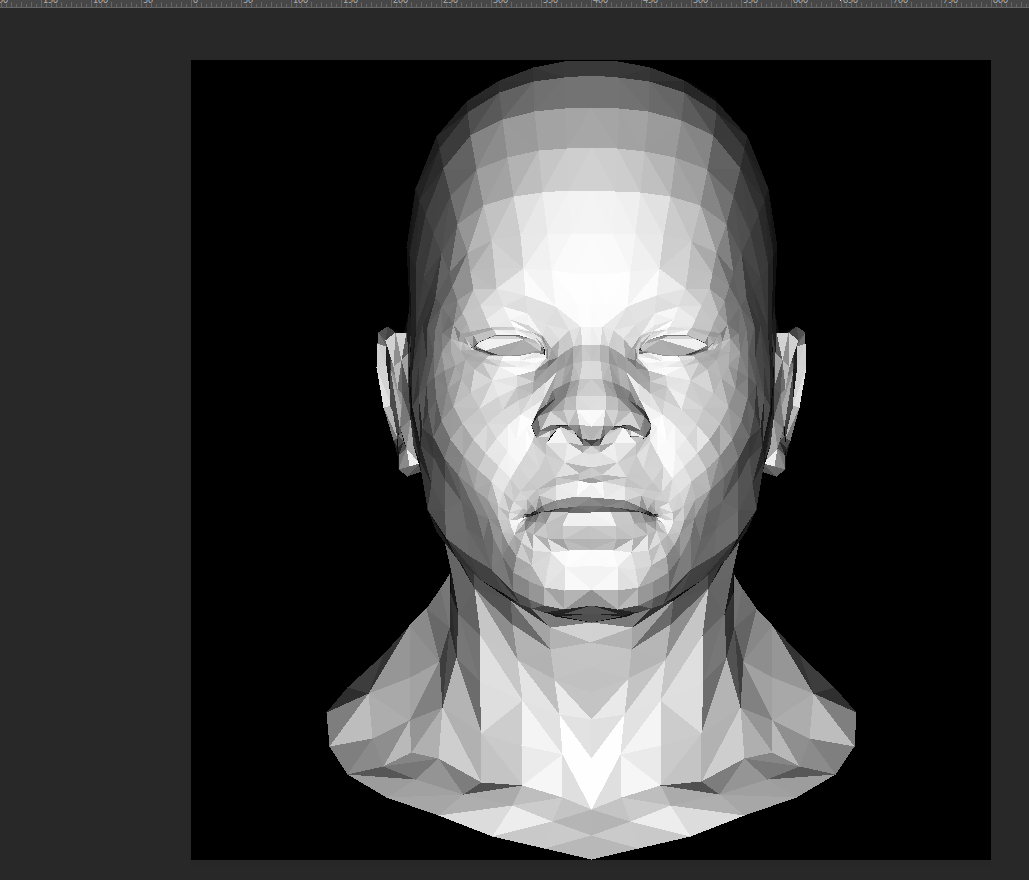
在我们之前上一节实现的平面着色上增加深度值的检测,会让我们的图象看起来更加立体
下面将要给我们的模型加上贴图,让渲染的模型看起来更加真实。这里我们采用重心坐标插值的办法来进行纹理贴
图,首先我们需要知道某个三角形顶点上的UV值,然后通过插值的办法计算出三角形内部某个点的UV值,OBJ文
件里已经保存了顶点的纹理坐标和纹理信息,只需要进行一次插值计算即可。关键代码如下:
Vec3f p;
for (p.x = bboxmin.x; p.x < bboxmax.x; p.x++)
{
for (p.y = bboxmin.y; p.y < bboxmax.y; p.y++)
{
//找到重心坐标并判断是否在三角形内
Vec3f bc_screen = barycentric(pts[0], pts[1], pts[2], p);
if (bc_screen.x < 0 || bc_screen.y < 0 || bc_screen.z < 0) continue;
p.z = 0;
//重心坐标插值计算UV值
Vec2i uvp = uv[0] * bc_screen.x + uv[1] * bc_screen.y + uv[2] * bc_screen.z;
//通过重心坐标计算深度值
for (int i = 0; i < 3; i++) p.z += pts[i][2] * bc_screen[i];
if (zbuffer[int(p.x + p.y * width)] < p.z)
{
//更新深度值
zbuffer[int(p.x + p.y * width)] = p.z;
TGAColor color = model->diffuse(uvp); //找到对应纹理
image.set(p.x, p.y, TGAColor(color.r * intensity, color.g * intensity, color.b * intensity, 255));
}
}
}
if (intensity > 0) {
Vec2i uv[3];
for (int k = 0; k < 3; k++) {
uv[k] = model->uv(i, k);//获取三个顶点的UV值
}
triangle(pts,zbuffer,uv, image,intensity);
}
注意,这里要对model.h和geometry.h及.cpp文件进行修改,详情参考
效果如下:

Lesson 4 透视投影
投影大致可以分为透视投影和正交投影
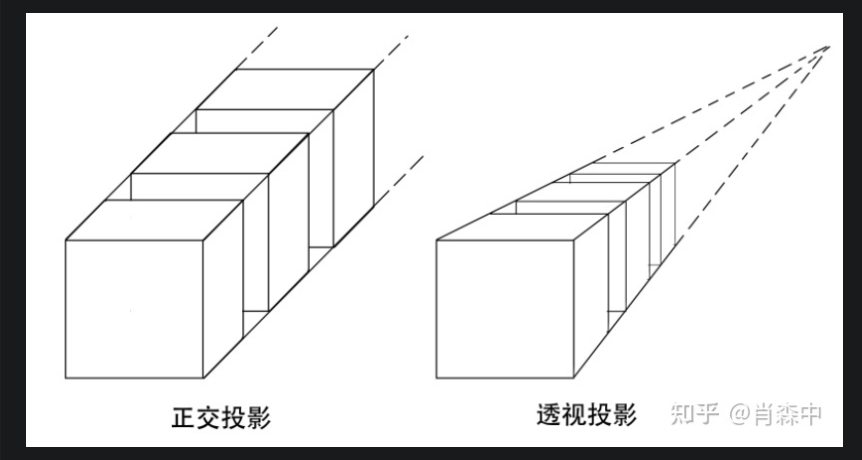
透视投影的最直观的效果就是近大远小。
对于透视投影的计算,我们需要进行简单的探讨,这里就不在讨论,强烈建议大家查看文章
文章中对缩放矩阵,平移矩阵等进行了详细的探讨。
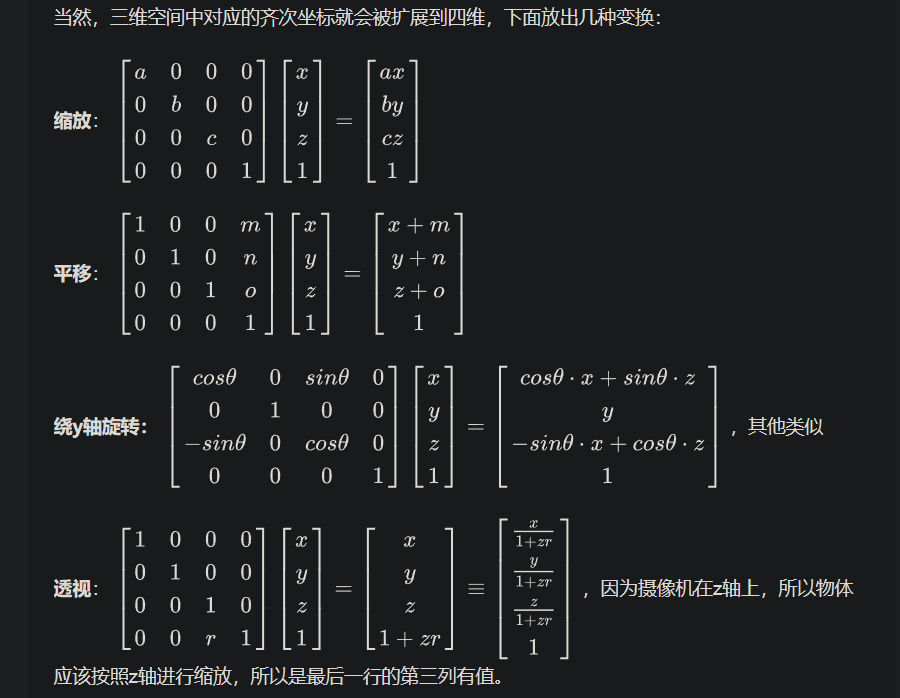
其中 r = -1/c,
接下来就是进行编码了。代码大体上和上一节差不多,多的部分就是利用矩阵来实现透视投影。
两个功能函数,4D变3D和3D变4D,和一个视角转换函数,
Vec3f m2v(Matrix m)
{
return Vec3f(m[0][0] / m[3][0], m[1][0] / m[3][0], m[2][0] / m[3][0]);
}
Matrix v2m(Vec3f v)
{
Matrix m(4,1);
m[0][0] = v.x;
m[1][0] = v.y;
m[2][0] = v.z;
m[3][0] = 1.f;//添加一个1表示坐标
return m;
}
//视图矩阵,把模型坐标的(-1,1)转换成屏幕坐标的(100,700)
//zbuffer从(-1,1)转换成0~255
Matrix viewport(int x, int y, int w, int h) {
Matrix m = Matrix::identity(4);
//平移
m[0][3] = x + w / 2.f;
m[1][3] = y + h / 2.f;
m[2][3] = depth / 2.f;
//缩放
m[0][0] = w / 2.f;
m[1][1] = h / 2.f;
m[2][2] = depth / 2.f;
return m;
}
对投影矩阵和视角矩阵进行初始化,这里注意投影矩阵的[3] [2]坐标
//初始化透视投影矩阵
Matrix Projection = Matrix::identity(4);
//初始化视角矩阵
Matrix ViewPort = viewport(width / 8, height / 8, width * 3 / 4, height * 3 / 4);
//投影矩阵[3][2]=-1/c,c为相机z坐标
Projection[3][2] = -1.f / camera.z;
有了这三个矩阵,在计算屏幕坐标的时候,直接进行乘就行,简称为MVP变换,M是模型矩阵,V是视角矩阵,P是投影矩阵。
for (int j = 0; j < 3; j++) {
Vec3f v = model->vert(face[j]);
//视角矩阵*投影矩阵*坐标
screen_coords[j] = m2v(ViewPort * Projection * v2m(v));
world_coords[j] = v;
}
就在这里应用,和原来的代码的主要不同之处也就在这。最后结果如下
下面是深度图:
现在通过学习,已经学会了
三角形的栅格化及背面剔除 (通过实现不同光照来实现背部剔除)
zbuffer深度缓冲区
纹理贴图 (利用重心坐标插值)
透视投影 (MVP变换)
之处也就在这。最后结果如下