C++ 哈希桶模拟实现(补充)
目录
定义基本的存储结构
Insert()和Find()
Erase()
如何控制哈希冲突?
Insert()中添加扩容操作
其他问题的解决
UnorderedMap.h和UnorderedSet.h
迭代器实现与UnorderedMap.h和UnorderedSet.h的封装
定义基本的存储结构
#pragma once
#include<iostream>
#include<vector>
using namespace std;
namespace OpenHash
{
template<class K,class V>
struct HashNode
{
HashNode<K, V>* _next;
pair<K, V> _kv;
//构造函数
HashNode(const pair<K, V>& kv)
:_next(nullptr)
,_kv(kv)
{}
};
template<class K,class V>
class HashTable
{
typedef HashNode<K, V>Node;
public:
//待写
private:
vector<Node*> _table;
size_t _n = 0; //有效数据的个数
};
}Insert()和Find()
bool Insert(const pair<K, V>& kv)
{
//Find()函数防止冗余
if (Find(kv.first))
return false;
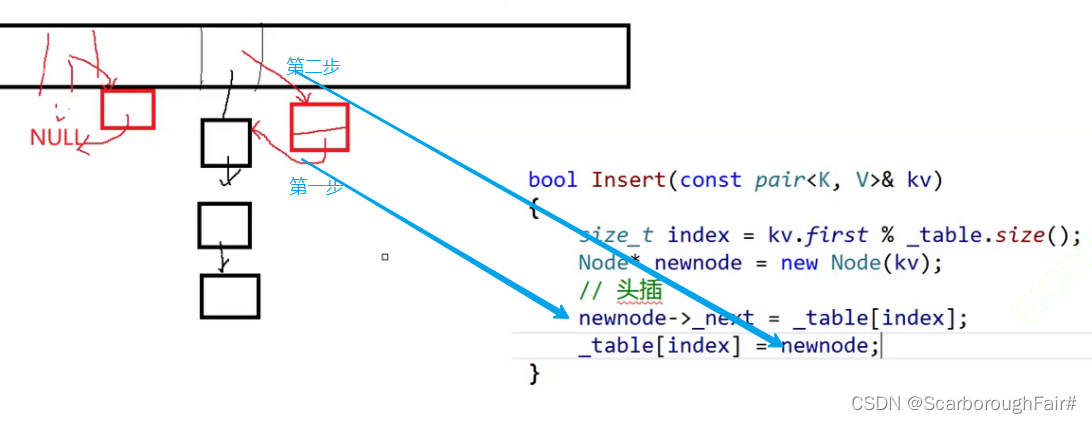
size_t index = kv.first % _table.size();
//采用头插法,尾插法还需要找尾,麻烦
Node* newnode = new Node(kv);
newnode->_next = _table[index];
_table[index] = newnode;
++_n;
return true;
}
Node* Find(const K& key)
{
size_t index = kv.first % _table.size();
Node* cur = _table[index];
while (cur)
{
if (cur->_kv.first == key)
{
return cur;
}
else
{
cur = cur->_next;
}
}
return nullptr;
}Erase()
思考:如果单链表不给头结点,如何删除指定节点?采用替换法删除
将下一个节点的值赋给指定节点,再删除下一个节点

思考:采用替换法如何删除尾节点?以下图为例,删除104节点

bool Erase(const K& key)
{
size_t index = kv.first % _table.size();
Node* prev = nullptr;
Node* cur = _table[index];
while (cur)
{
if (cur->_kv.first == key)
{
if (_table[index] == cur)
{
_table[index] = cur->_next;
}
else
{
prev->_next = cur->_next;
}
--_n;
delete cur;
return true;
}
prev = cur;
cur = cur->_next;
}
return false;
}如何控制哈希冲突?

Insert()中添加扩容操作
bool Insert(const pair<K, V>& kv)
{
//Find()函数防止冗余
if (Find(kv.first))
return false;
//负载因子到1的时候增容
//负载因子为0的时候要防止除零错误
if (_n == _table.size())
{
vector<Node*> newtable;
size_t newSize = _table.size() == 0 ? 10 : _table.size() * 2;
newtable.resize(newSize, nullptr);
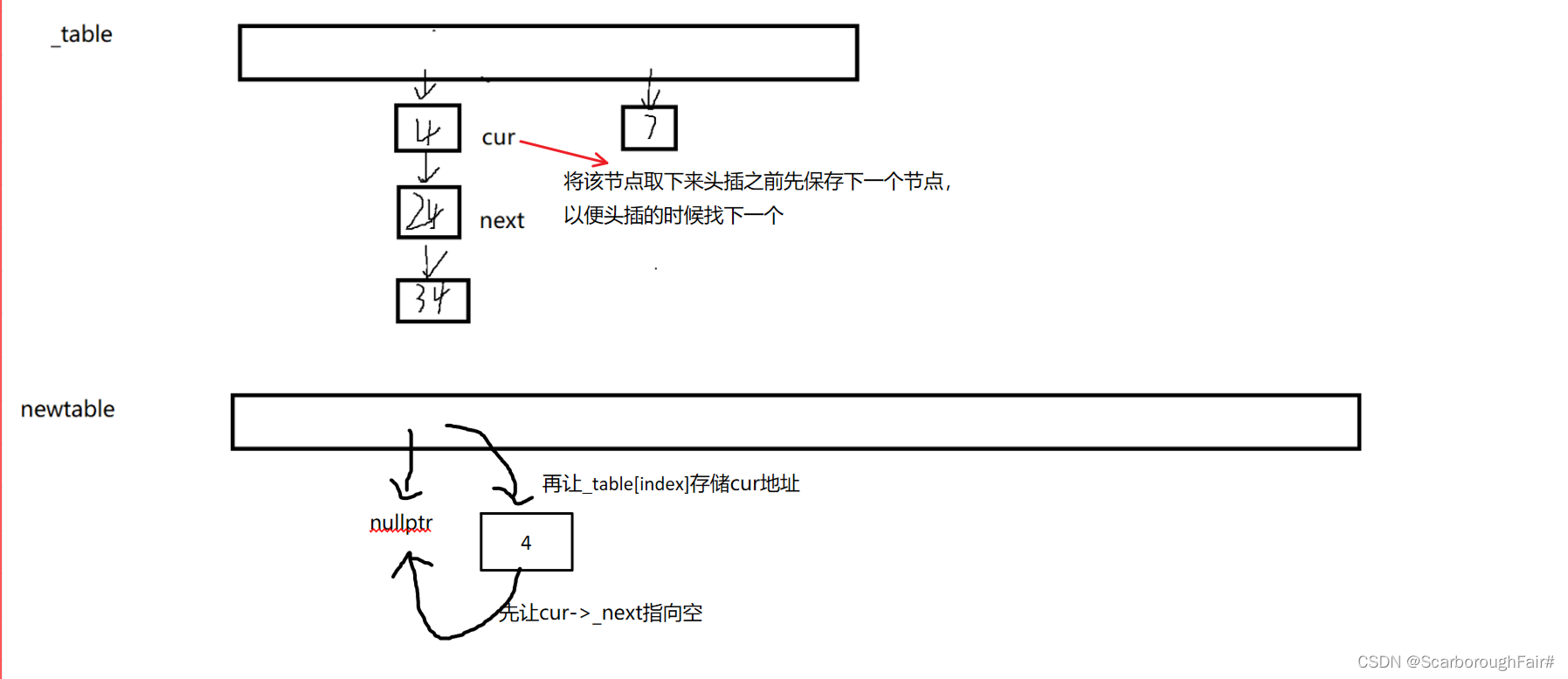
//遍历取旧表中节点,重新算映射到新表中的位置,挂到新表中
for (size_t i = 0; i < _table.size(); ++i)
{
if (_table[i])//operator[]会检查给的下标是否在0到size这个范围之内
{
Node* cur = _table[i];
while (cur)//若不为空,则把该桶取完,计算其在新表中的位置
{
Node* next = cur->_next;//保存cur的下一个节点
size_t index = cur->_kv.first % newtable.size();
//头插
cur->_next = newtable[index];
_table[index] = cur;
cur = next;
}
_table[i] = nullptr;//都处理完后旧表的当前位置可置空
}
}
_table.swap(newtable); //交换新旧表
}
size_t index = kv.first % _table.size();
//采用头插法,尾插法还需要找尾,麻烦
Node* newnode = new Node(kv);
newnode->_next = _table[index];
_table[index] = newnode;
++_n;
return true;
}
其他问题的解决
1.K不支持取模的情况?提供一个默认返回的仿函数,再提供一个特化的仿函数。后续需要取模的地方使用仿函数即可(详细见全部代码)
template<class K>
struct Hash
{
size_t operator()(const K& key)
{
return key;
}
};
// 特化
template<>
struct Hash<string>
{
// "int" "insert"
// 字符串转成对应一个整形值,因为整形才能取模算映射位置
// 期望->字符串不同,转出的整形值尽量不同
// "abcd" "bcad"
// "abbb" "abca"
size_t operator()(const string& s)
{
// BKDR Hash
size_t value = 0;
for (auto ch : s)
{
value += ch;
value *= 131;
}
return value;
}
};2.除了控制负载因子,尽量让表的大小为素数也可以控制哈希冲突。但是此时对于增容的挑战很大:要保证增容二倍后还是表的大小还是素数。->通过素数表解决
//提供一个素数表(来自STL源码)
size_t GetNextPrime(size_t prime)
{
const int PRIMECOUNT = 28;
static const size_t primeList[PRIMECOUNT] = //定义成静态的,不用每次重新创建数组
{
53ul, 97ul, 193ul, 389ul, 769ul,
1543ul, 3079ul, 6151ul, 12289ul, 24593ul,
49157ul, 98317ul, 196613ul, 393241ul, 786433ul,
1572869ul, 3145739ul, 6291469ul, 12582917ul, 25165843ul,
50331653ul, 100663319ul, 201326611ul, 402653189ul, 805306457ul,
1610612741ul, 3221225473ul, 4294967291ul
};
size_t i = 0;
for (; i < PRIMECOUNT; ++i)
{
//获取一个比当前素数要大的数
if (primeList[i] > prime)
return primeList[i];
}
return primeList[i];
}此时增容函数就可进行修改

bool Insert(const pair<K, V>& kv)
{
//Find()函数防止冗余
if (Find(kv.first))
return false;
HashFunc hf;
//负载因子到1的时候增容
//负载因子为0的时候要防止除零错误
if (_n == _table.size())
{
vector<Node*> newtable;
//size_t newSize = _table.size() == 0 ? 10 : _table.size() * 2;
//newtable.resize(newSize, nullptr);
newtable.resize(GetNextPrime(_table.size()));//通过素数表可重新写增容函数
//遍历取旧表中节点,重新算映射到新表中的位置,挂到新表中
for (size_t i = 0; i < _table.size(); ++i)
{
if (_table[i])//operator[]会检查给的下标是否在0到size这个范围之内
{
Node* cur = _table[i];
while (cur)//若不为空,则把该桶取完,计算其在新表中的位置
{
Node* next = cur->_next;//保存cur的下一个节点
size_t index = hf(cur->_kv.first) % newtable.size();
//头插
cur->_next = newtable[index];
_table[index] = cur;
cur = next;
}
_table[i] = nullptr;//都处理完后旧表的当前位置可置空
}
}
_table.swap(newtable); //交换新旧表
}
size_t index = hf(kv.first) % _table.size();
//采用头插法,尾插法还需要找尾,麻烦
Node* newnode = new Node(kv);
newnode->_next = _table[index];
_table[index] = newnode;
++_n;
return true;
}UnorderedMap.h和UnorderedSet.h
#pragma once
#include"HashTable.h"
namespace bit
{
template<class K, class V>
class unordered_map
{
public:
struct MapKeyOfT
{
const K& operator()(const pair<K, V>& kv)
{
return kv.first;
}
};
bool Insert(const pair<K, V>& kv)
{
_ht.Insert(kv);
return true;
}
private:
OpenHash::HashTable<K, pair<K, V>, MapKeyOfT>_ht;
};
}
#pragma once
#include"HashTable.h"
namespace bit
{
template<class K, class V>
class unordered_set
{
public:
struct SetKeyOfT
{
const K& operator()(const K& k)
{
return k;
}
};
bool Insert(const K k)
{
_ht.Insert(k);
return true;
}
private:
OpenHash::HashTable<K,V,SetKeyOfT>_ht;
};
}
迭代器实现与UnorderedMap.h和UnorderedSet.h的封装
各个部分的改动和添加看注释即可,最终整体代码如下
#pragma once
#include<iostream>
#include<vector>
using namespace std;
namespace OpenHash
{
template<class K>
struct Hash
{
size_t operator()(const K& key)
{
return key;
}
};
// 特化
template<>
struct Hash<string>
{
// "int" "insert"
// 字符串转成对应一个整形值,因为整形才能取模算映射位置
// 期望->字符串不同,转出的整形值尽量不同
// "abcd" "bcad"
// "abbb" "abca"
size_t operator()(const string& s)
{
// BKDR Hash
size_t value = 0;
for (auto ch : s)
{
value += ch;
value *= 131;
}
return value;
}
};
template<class T>
struct HashNode
{
HashNode<T>* _next;
T _data;
HashNode(const T& data)
:_next(nullptr)
,_data(data)
{}
};
//前置声明
//前置声明不需要给默认参数
template<class K, class T, class KeyOfT, class HashFunc>
class HashTable;
//哈希桶迭代器
template<class K, class T, class KeyOfT, class HashFunc = Hash<K>>
struct _HTIterator
{
typedef HashNode<T> Node;
typedef _HTIterator<K, T, KeyOfT, HashFunc>Self;
typedef HashTable<K, T, KeyOfT, HashFunc>HT;
Node* _node;
HT* _pht;//传哈希表的指针
_HTIterator(Node* node,HT* pht)
:_node(node)
,_pht(pht)
{}
Self& operator++()
{
//1.当前桶中还有数据,那么就在当前桶往后走
//2.当前桶走完了,需要往下一个桶去走
if (_node->_next)
{
_node = _node->_next;
}
else
{
//迭代器走到当前桶的最后一个位置的时候如何进入下一个桶?
_pht->_table.size();
KeyOfT kot;
HashFunc hf;
size_t index = hf(kot(_node->_data)) % _pht->_table.size();//算出当前桶的位置
//通过keyoft的仿函数取出data里面的k取出,k再通过HashFunc的仿函数转换成可以取模的整型
++index;
while (index < _pht->_table.size())
{
if (_pht->_table[index])//找到下一个桶了
{
_node = _pht->_table[index];//指向桶里面的第一个节点
return *this;
}
else
{
++index;
}
}
//return iterator(nullptr, _pht);//后面没有桶了,返回空的迭代器
_node = nullptr;
}
return *this;
}
T& operator*()
{
return _node->_data;
}
T* operator->()
{
return &_node->_data;
}
bool operator != (const Self& s)const
{
return _node != s._node;
}
bool operator == (const Self& s)const
{
return _node == s._node;
}
};
template<class K,class T, class KeyOfT,class HashFunc = Hash<K>>
class HashTable
{
typedef HashNode<T>Node;
//设计类模板的友元
template<class K, class T, class KeyOfT, class HashFunc>//需要添加模板参数
friend struct _HTIterator;
public:
typedef _HTIterator<K, T, KeyOfT, HashFunc> iterator;
//默认的构造
HashTable() = default; //C++11关键词:显示指定生成默认构造
//拷贝构造赋值
HashTable(const HashTable& ht)
{
//深拷贝
_n = ht._n;
_table.resize(ht._table.size());
for (size_t i = 0; i < ht._table.size(); i++)
{
Node* cur = ht._table[i];
while (cur)
{
Node* copy = new Node(cur->_data);
//头插到新表
copy->_next = table[i];
_table[i] = copy;
cur = cur->_next;
}
}
}
//赋值
HashTable& operator=(const HashTable ht)
{
_table.swap(ht._table);
swap(_n,ht._n);
return *this;
}
//析构
~HashTable()
{
for (size_t i = 0; i < _table.size();i++)
{
Node* cur = _table[i];
while (cur)
{
Node* next = cur->_next;//保存当前节点
delete cur; //释放当前节点
cur = next;
}
_table[i] = nullptr;
}
}
iterator begin()
{
//返回第一个桶里面的第一个节点
size_t i = 0;
while (i<_table.size())
{
if (_table[i])//不为空就找到第一个桶
{
return iterator(_table[i],this);//迭代器需要一个节点的指针,_table[i]就是节点的指针
//成员函数this就是自己对象的地址,即this就是哈希表的地址
}
++i;
}
return end();
}
iterator end()
{
return iterator(nullptr, this);
}
//提供一个素数表(来自STL源码)
size_t GetNextPrime(size_t prime)
{
const int PRIMECOUNT = 28;
static const size_t primeList[PRIMECOUNT] = //定义成静态的,不用每次重新创建数组
{
53ul, 97ul, 193ul, 389ul, 769ul,
1543ul, 3079ul, 6151ul, 12289ul, 24593ul,
49157ul, 98317ul, 196613ul, 393241ul, 786433ul,
1572869ul, 3145739ul, 6291469ul, 12582917ul, 25165843ul,
50331653ul, 100663319ul, 201326611ul, 402653189ul, 805306457ul,
1610612741ul, 3221225473ul, 4294967291ul
};
size_t i = 0;
for (; i < PRIMECOUNT; ++i)
{
//获取一个比当前素数要大的数
if (primeList[i] > prime)
return primeList[i];
}
return primeList[i];
}
pair<iterator,bool> Insert(const T& data)
{
KeyOfT kot;
//找到了
auto ret = Find(kot(data));
if(ret != end())
return make_pair(ret,false);
HashFunc hf;
//负载因子到1的时候增容
//负载因子为0的时候要防止除零错误
if (_n == _table.size())
{
vector<Node*> newtable;
//size_t newSize = _table.size() == 0 ? 10 : _table.size() * 2;
//newtable.resize(newSize, nullptr);
newtable.resize(GetNextPrime(_table.size()));//通过素数表可重新写增容函数
//遍历取旧表中节点,重新算映射到新表中的位置,挂到新表中
for (size_t i = 0; i < _table.size(); ++i)
{
if (_table[i])//operator[]会检查给的下标是否在0到size这个范围之内
{
Node* cur = _table[i];
while (cur)//若不为空,则把该桶取完,计算其在新表中的位置
{
Node* next = cur->_next;//保存cur的下一个节点
size_t index = hf(kot(cur->_data)) % newtable.size();
//头插
cur->_next = newtable[index];
_table[index] = cur;
cur = next;
}
_table[i] = nullptr;//都处理完后旧表的当前位置可置空
}
}
_table.swap(newtable); //交换新旧表
}
size_t index = hf(kot(data)) % _table.size();
//采用头插法,尾插法还需要找尾,麻烦
Node* newnode = new Node(data);
newnode->_next = _table[index];
_table[index] = newnode;
++_n;
return make_pair(iterator(newnode, this), true);
}
iterator Find(const K& key)
{
if (_table.size() == 0)
{
return end();
}
KeyOfT kot;
HashFunc hf;
size_t index = hf(key) % _table.size();
Node* cur = _table[index];
while (cur)
{
if (kot(cur->_data) == key)
{
return iterator(cur,this);//Find的返回值为迭代器
}
else
{
cur = cur->_next;
}
}
return end();
}
bool Erase(const K& key)
{
size_t index = hf(kot(key)) % _table.size();
Node* prev = nullptr;
Node* cur = _table[index];
while (cur)
{
if (kot(cur->data) == key)
{
if (_table[index] == cur)
{
_table[index] = cur->_next;
}
else
{
prev->_next = cur->_next;
}
--_n;
delete cur;
return true;
}
prev = cur;
cur = cur->_next;
}
return false;
}
void TestHashTable1()
{
int a[] = { 1,5,30,100000,100,18,15,7,40,44 };
HashTable<int, int>ht;
for (auto e : a)
{
ht.Insert(make_pair(e.e));
}
ht.Insert(make_pair(25, 25));
}
private:
vector<Node*> _table;
size_t _n = 0; //有效数据的个数
};
}#pragma once
#include "HashTable.h"
namespace bit
{
template<class K>
class unordered_set
{
struct SetKeyOfT
{
const K& operator()(const K& k)
{
return k;
}
};
public:
typedef typename OpenHash::HashTable<K, K, SetKeyOfT>::iterator iterator;
iterator begin()
{
return _ht.begin();
}
iterator end()
{
return _ht.end();
}
pair<iterator,bool> insert(const K k)
{
return _ht.Insert(k);
}
private:
OpenHash::HashTable<K, K, SetKeyOfT> _ht;
};
void test_unordered_set1()
{
unordered_set<int> us;
us.insert(200);
us.insert(1);
us.insert(2);
us.insert(33);
us.insert(50);
us.insert(60);
us.insert(243);
us.insert(6);
unordered_set<int>::iterator it = us.begin();
while (it != us.end())
{
cout << *it << " ";
++it;
}
}
}
#pragma once
#include "HashTable.h"
namespace bit
{
template<class K, class V>
class unordered_map
{
struct MapKeyOfT
{
const K& operator()(const pair<K, V>& kv)
{
return kv.first;
}
};
public:
typedef typename OpenHash::HashTable<K, pair<K, V>, MapKeyOfT>::iterator iterator;
iterator begin()
{
return _ht.begin();
}
iterator end()
{
return _ht.end();
}
pair<iterator, bool> insert(const pair<K, V>& kv)
{
return _ht.Insert(kv);
}
V& operator[](const K& key)
{
pair<iterator, bool> ret = _ht.Insert(make_pair(key, V()));
return ret.first->second;
}
private:
OpenHash::HashTable<K, pair<K, V>, MapKeyOfT> _ht;
};
void test_unordered_map1()
{
unordered_map<string, string> dict;
dict.insert(make_pair("sort", "排序"));
dict["left"] = "左边";
dict["left"] = "剩余";
dict["map"] = "映射";
dict["string"] = "字符串ַ";
dict["set"] = "集合";
unordered_map<string, string>::iterator it = dict.begin();
while (it != dict.end())
{
cout << it->first << ":" << it->second << endl;
++it;
}
cout << endl;
}
}