【侯捷C++-----STL与泛型编程】
Part1 概览
标准库以头文件的形式呈现
Part2 STL(Stand Template Library)体系结构基础
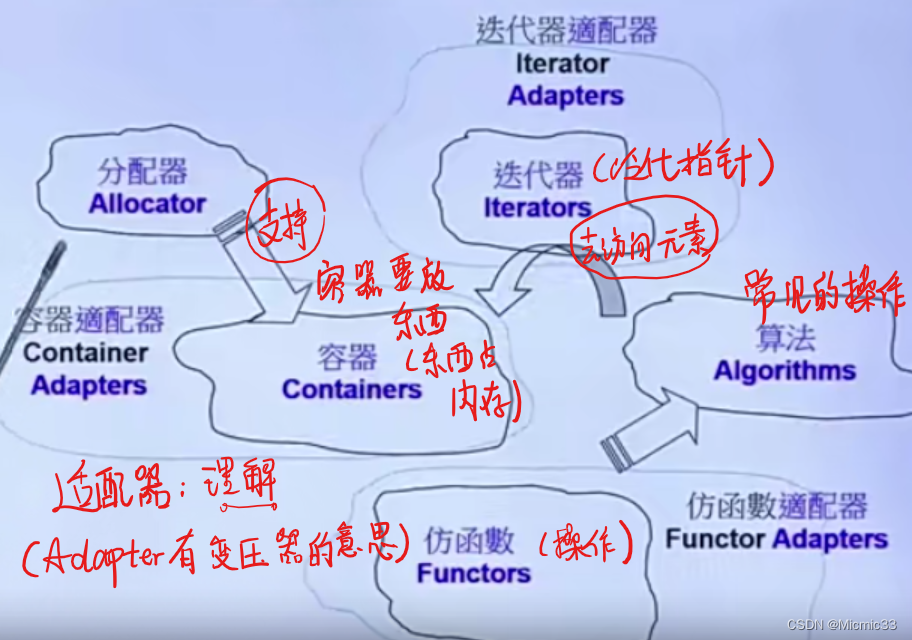
STL六大部件:
容器(Containers)
分配器(Allocators)
算法(Algorithms)
迭代器(Iterators)
适配器(Adapters)
仿函数(Functors)
"前闭后开区间":begin()指向第一个元素,end()指向最后一个元素的下一个
C++基于范围的for循环:
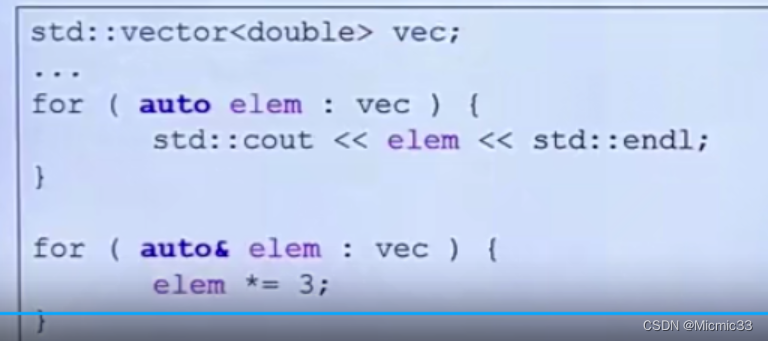
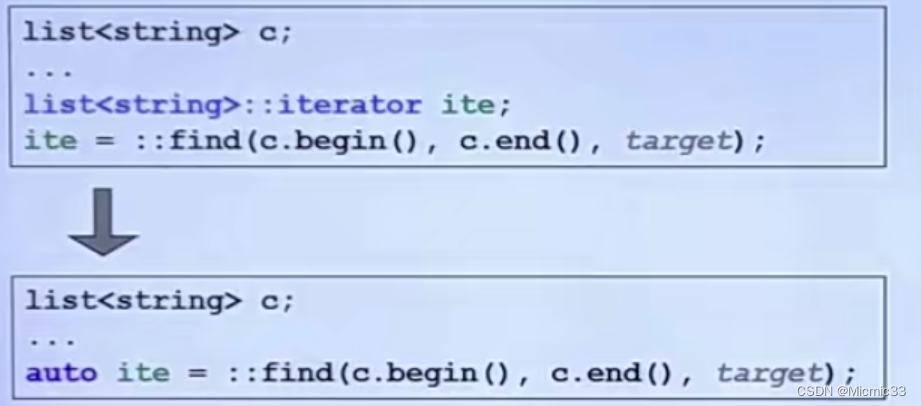
同样的,auto关键字可以这样取代迭代器写一堆