算法笔记(四)从暴力递归到动态规划
layout: post
title: 算法笔记(四)从暴力递归到动态规划
description: 算法笔记(四)从暴力递归到动态规划
tag: 算法
文章目录
- 机器人路径数
- 暴力递归
- memo表记忆搜索
- 动态规划
- 组成目标最少需要几枚硬币
- 暴力递归
机器人路径数
【题目】给定一个数N代表从1~N有N个位置,在起始位置1处只能往后走,结尾位置N处只能往前走,再给定机器人初始位置S和需要前往的位置E,如果规定必须在K步从S到达E,有多少种路径选择?
暴力递归
暴力递归的方法就是每次来到某个位置,尝试所有可以走的路,直至剩余步数为0.
int forceRecurRobotPath(int N, int E, int rest , int cur) {
// 当恰好走,返回当前位置是否为E,是则找到一条路
if (rest == 0) {
return cur == E ? 1 : 0;
}
// 当来到1处只能往后走
if (cur == 1) {
return forceRecurRobotPath(N, E, rest - 1, cur + 1);
}
// 当来到N处只能往前走
if (cur == N) {
return forceRecurRobotPath(N, E, rest - 1, cur - 1);
}
// 中间位置既可以往前也可以往后
return forceRecurRobotPath(N, E, rest - 1, cur + 1) + (N, E, rest - 1, cur - 1);
}
int robotPath1(int N, int E, int K, int S) {
return forceRecurRobotPath(N, E, K, S);
}
memo表记忆搜索
上边暴力递归只有两个可变参数rest和cur,
这样暴力递归会重复计算很多之前计算过的过程。那么一个改进的思路就是以空间换时间,记录下每个可变参数的组合的计算结果到表中,每次如果遇到表中已有组合即可直接调用,称为记忆化搜索版本递归

按照这种思路,写出带记忆搜索的递归:
构建一个二维数组memo表,将可变参数rest和cur的所有组合找到的可行路径数都记录下:
rest的取值范围为[0, K],cur的取值范围为[1,N]
vector<vector<int>> memo(N + 1, vector<int>(K + 1, -1));
// 带备忘录的递归
int memoRecurRobotPath(int N, int E, int rest, int cur, vector<vector<int>> memo) {
if (memo[rest][cur] != -1) {
return memo[rest][cur];
}
// 当恰好走完,返回当前位置是否为E,是则找到一条路
if (rest == 0) {
memo[rest][cur] = cur == E ? 1 : 0;
}
// 当来到1处只能往后走
else if (cur == 1) {
memo[rest][cur] = memoRecurRobotPath(N, E, rest - 1, cur + 1, memo);
}
// 当来到N处只能往前走
else if (cur == N) {
memo[rest][cur] = memoRecurRobotPath(N, E, rest - 1, cur - 1, memo);
}
else
{
// 中间位置既可以往前也可以往后
memo[rest][cur] = memoRecurRobotPath(N, E, rest - 1, cur + 1, memo) + memoRecurRobotPath(N, E, rest - 1, cur - 1, memo);
}
return memo[rest][cur];
}
int robotPath2(int N, int E, int K, int S) {
vector<vector<int>> memo(N + 1, vector<int>(K + 1, -1));
return memoRecurRobotPath(N, E, K, S, memo);
}
动态规划
如果memo表结构数据之间有严格的依赖关系,那么可以将他改为动态规划的形式。
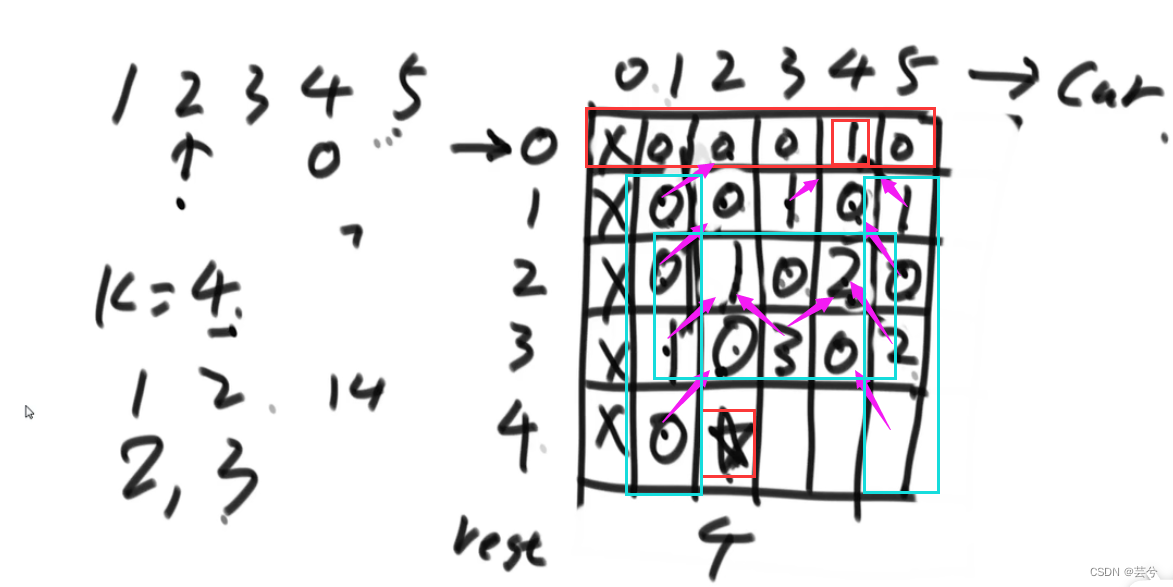
如下图,从递归过程上看,首先rest为0时,只有cur = 4(E),位置找到一种路径,红色框是出口位置。当cur来到1,它只能往后走,路径数依赖于f(rest - 1, cur + 1),即它在memo表中右上方的结果,cur来到N,只能往前走,路径数依赖于f(rest-1,cur-1),即它在memo表中左上方的结果,而当cur在中间位置时,它依赖于f(rest-1,cur-1)+ f(rest-1,cur+1),左上+右上。由此,表中所有数据其实都可以由已经解计算出来,这是一种严格表结构。动态规划的过程就是,直接根据严格表的依赖关系,从表中已有解,一步一步得到全部的解,而所求必在表中。
动态规划版本:
int dpRobotPath(int N, int E, int K, int S) {
vector<vector<int>> memo(K + 1, vector<int>(N + 1, -1));
// rest = 0(when row = 0:) 先全赋值0, i = 0位置都-1,弃用
for (int i = 1; i < N + 1; i++) {
memo[0][i] = 0;
}
// 再将出口即终点处赋值为1
memo[0][E] = 1;
for (int rest = 1; rest <= K; rest++) {
for (int cur = 1; cur <= N; cur++) {
if (cur == 1) {
memo[rest][cur] = memo[rest - 1][2];
}
else if(cur == N) {
memo[rest][cur] = memo[rest - 1][N - 1];
}
else {
memo[rest][cur] = memo[rest - 1][cur - 1] + memo[rest - 1][cur + 1];
}
}
}
return memo[K][S];
}
组成目标最少需要几枚硬币
【题目】给定正数数组,每个值代表一个硬币的币值,给定目标值target,问最少需要几枚硬币可以组成target。
暴力递归
每个硬币选或不选两种可能,这就可以列出所有的硬币的选择组合,将所有可以达成target的组合进行对比,选取硬币最少的组合。