Python基于OpenCV监控老鼠蟑螂检测系统[完整源码&部署教程]
1.视频演示:
[项目分享]Python基于OpenCV监控老鼠蟑螂检测系统[完整源码&部署教程]_哔哩哔哩_bilibili
2.图片演示:



3.明厨亮灶:
餐饮企业的厨房卫生状况一直饱受消费者诟病,许多宾馆饭店大厅、包间富丽堂皇,然而,厨房却往往惨不忍睹。尤其是餐厅中出现老鼠的事故,最近几年频繁发生。有媒体曾经爆料过,著名的海底捞餐厅,甚至是快餐领域的巨头肯德基和麦当劳的厨房都出现了老鼠的踪迹。
明厨亮灶是国家食品药品监督管理局推行的一项利民工程,即让消费者坐在饭店 大厅或者包间,就可以通过透明玻璃或大屏幕将后厨的一举一动尽收眼底。此举既是督促 餐饮单位加强自律,也是鼓励他律,使餐饮单位全面接受消费者监督,主动保障饮食安全。随着视频分析以及人工智能技术的发展与进步,越来越多的事件可以通过视频监控实时进行检测与识别,通过视频分析可以对监控场景中的老鼠进行检测,同时可以实现对老鼠的踪迹进行记录、提前侦测深圳进行报警。
老鼠检测算法方案:
老鼠体积较小,另外厨房内安装的摄像头要同时兼顾监控录像功能,所以镜头几乎不会太大,即要看的场景视角要宽阔,所以送到算法模块中的帧图像中老鼠的成像面积都是很小的,所以基于这些限制条件,那么对于熟悉算法的人来说,几乎只有一种方案可选了。那就是:“运动目标检测+目标跟踪+目标分类”。
运动目标检测算法离不开背景建模,具体背景建模算法可以参考之前的文章:https://zhuanlan.zhihu.com/p/266800330
目标跟踪算法离不开简单使用的kalman,具体的跟踪算法可以参考之前的文章:
https://zhuanlan.zhihu.com/p/268758079
老鼠分类算法,基于传统的机器学习方法:adaboost、svm、dpm、xgboost等,速度快,但是准确率很难再提升上去;建议采用深度学习方法,比如resnet系列的网络,自己独立设计几层小网络,即可达到很好的效果。
老鼠加测分类网络,最近在github上查到一个较好的贡献,包括背景建模、分类模型、测试视频等全过程代码,非常感谢这位贡献者,但是实测下来,模型分类效果还是存在误报,所以距离落地还是有一定差距,关键是训练数据,因为夜间老鼠的数据还是很稀有的。Github链接:
https://github.com/isyanan1024/Mouse-detect
github.com/isyanan1024/Mouse-detect
4.现有算法存在的缺陷:
老鼠检测在明初亮灶项目上几乎是必须的,虽然貌似比较简单,但是真正做到实用落地还是比较难的,所有人都知道背景建模误报多,但是还是离不开它,但是你要想在背景建模的算法上做出花样来,那几乎又不是太可能的,所以老鼠检测算法的方案也是把整个CV方案能用到的模块都遍历到了,至于最终效果,就需要一定的工程trick、策略等等。明厨亮灶:老鼠检测算法应用的几个落地难点介绍如下,后续有机会更新解决方法。
1、 老鼠样本数据少
厨房白天有人,老鼠不出来,所以老鼠检测都是没人的晚上用。晚上的厨房一般都是关灯的,几乎没有光线,需要摄像头红外补光来或许图像,所以真实应用时,摄像头图片都是灰度的,老鼠的两个眼睛都是白亮白亮的。因为数据的稀缺性,这就严重影响了算法的性能。
2、 误报多
其实算法初期的几个版本,误报多的几乎惨不忍睹,背景建模的副作用还是很大的,另外前期训练数据较少,分类效果不佳,去误报模块策略不完备,所以误报较多。
3、 应用推广难
其实这个需求,作为各个餐馆、食品厂的个体户或者老板,肯定是不希望安装这个老鼠检测的,因为会罚款。那么这个需求是谁提的呢,其实是各个地区的食药监,其实这个应用的真实需求是政府,那么想拿到这个需求单子就要政府打交道了,这就不是一般的集成商或者工程商可以拿到的了,所以也限制了一些算法公司开发的积极性。
5.本文算法原理:
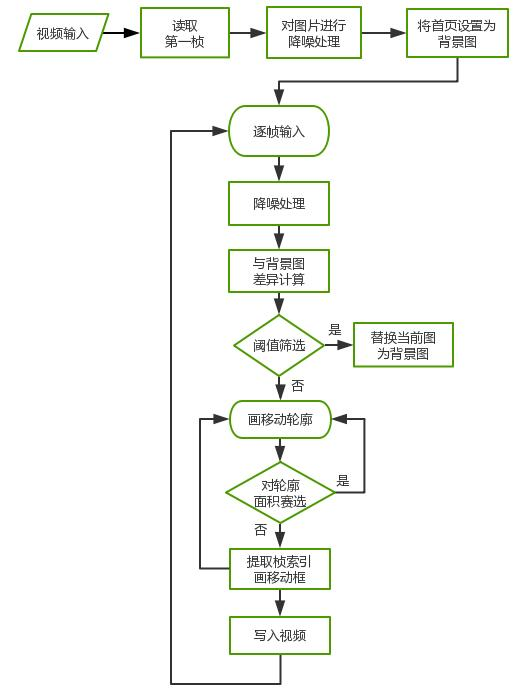
为了解决上述困难,本文采用帧间差分法,又称移动侦测。移动侦测即是根据视频每帧或者几帧之间像素的差异,对差异值设置阈值,筛选大于阈值的像素点,做掩模图即可选出视频中存在变化的桢。帧差法较为简单的视频中物体移动侦测,帧差法分为:单帧差、两桢差、和三桢差。随着帧数的增加是防止检测结果的重影。
帧间差分法(Temporal Difference)
由于场景中的目标在运动,目标的影像在不同图像帧中的位置不同。该类算法对时间上连续的两帧或三帧图像进行差分运算,不同帧对应的像素点相减,判断灰度差的绝对值,当绝对值超过一定阈值时,即可判断为运动目标,从而实现目标的检测功能。
6.算法流程图:
7.代码实现:
def threh(video,save_video,thres1,area_threh):
cam = cv2.VideoCapture(video)#打开一个视频
input_fps = cam.get(cv2.CAP_PROP_FPS)
ret_val, input_image = cam.read()
index=[]
images=[]
images.append(input_image)
video_length = int(cam.get(cv2.CAP_PROP_FRAME_COUNT))
input_image=cv2.resize(input_image,(512,512))
ending_frame = video_length
fourcc = cv2.VideoWriter_fourcc(*'XVID')
out = cv2.VideoWriter(save_video,fourcc, input_fps, (512, 512))
gray_lwpCV = cv2.cvtColor(input_image, cv2.COLOR_BGR2GRAY)
gray_lwpCV = cv2.GaussianBlur(gray_lwpCV, (21, 21), 0)
background=gray_lwpCV
# es = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (9, 4))
i = 0 # default is 0
outt=[]
while(cam.isOpened()) and ret_val == True and i <2999:
## if i % 2==1:
ret_val, input_image = cam.read()
input_image=cv2.resize(input_image,(512,512))
gray_lwpCV = cv2.cvtColor(input_image, cv2.COLOR_BGR2GRAY)
gray_lwpCV = cv2.GaussianBlur(gray_lwpCV, (21, 21), 0)
diff = cv2.absdiff(background, gray_lwpCV)
outt.append(diff)
#跟着图像变换背景
tem_diff=diff.flatten()
tem_ds=pd.Series(tem_diff)
tem_per=1-len(tem_ds[tem_ds==0])/len(tem_ds)
if (tem_per <0.2 )| (tem_per>0.75):
background=gray_lwpCV
else:
diff = cv2.threshold(diff, thres1, 255, cv2.THRESH_BINARY)[1]
ret,thresh = cv2.threshold(diff.copy(),150,255,0)
contours, hierarchy = cv2.findContours(thresh,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
# contours, hierarchy = cv2.findContours(diff.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
if (cv2.contourArea(c) < area_threh) | (cv2.contourArea(c) >int(512*512*0.3) ) : # 对于矩形区域,只显示大于给定阈值的轮廓(去除微小的变化等噪点)
continue
(x, y, w, h) = cv2.boundingRect(c) # 该函数计算矩形的边界框
cv2.rectangle(input_image, (x, y), (x+w, y+h), (0, 255, 0), 2)
index.append(i)
# cv2.imshow('contours', input_image)
# cv2.imshow('dis', diff)
out.write(input_image)
images.append(input_image)
i = i+1
out.release()
cam.release()
return outt,index,images```
##调取函数
outt=threh('new_video.mp4','test6.mp4',25,3000)
8.系统整合:

9.完整源码&环境部署视频教程&自定义UI界面:
Python基于OpenCV监控老鼠蟑螂检测系统[完整源码&部署教程] (mianbaoduo.com)
10.参考文献:
- [1]红外弱小目标检测算法综述[J]. 李俊宏,张萍,王晓玮,黄世泽. 中国图象图形学报. 2020(09)
- [2]新型光电探测技术在精确制导武器上的应用研究(特约)[J]. 宋闯,姜鹏,段磊,孙剑峰,范之国. 红外与激光工程. 2020(06)
- [3]基于FPGA的红外弱小目标检测算法[J]. 张延苏,吴滢跃. 红外技术. 2020(06)
- [4]一种基于差分滤波的红外舰船目标检测方法[J]. 修炳楠,吕俊伟,鹿珂珂. 指挥与控制学报. 2020(02)
- [5]激光干扰红外预警卫星的有效压制区研究[J]. 王枭,张宇令,李云成. 激光与红外. 2020(05)
- [6]基于匹配滤波的Gm-APD激光雷达三维重构算法研究[J]. 马乐,陆威,姜鹏,刘迪,王鹏辉,孙剑峰. 红外与激光工程. 2020(02)
- [7]基于改进候选区域网络的红外飞机检测[J]. 姜晓伟,王春平,付强. 激光与红外. 2019(01)
- [8]红外搜索跟踪系统探测距离缩比测试方法[J]. 谢飞,周德召,胡磊力,杜保林. 电光与控制. 2019(04)
- [9]红外成像/被动微波复合制导技术研究[J]. 夏团结,申涛,方珉,宋敏敏,刘会文. 红外技术. 2018(05)
- [10]机载红外搜索跟踪系统有效探测区域研究[J]. 王芳,罗寰,王海晏,寇添,寇人可. 激光与红外. 2018(05)