Soft Actor-Critic(SAC算法)
强化学习—— Soft Actor-Critic(SAC算法
- 1. 基本概念
- 1.1 soft Q-value
- 1.2 soft state value function
- 1.3 Soft Policy Evaluation
- 1.4 policy improvement
- 1.5 soft policy improvemrnt
- 1.5 soft policy iteration
- 2. soft actor critic
- 2.1 soft value function
- 2.2 soft Q-function
- 2.3 policy improvement
- 3. 算法流程
1. 基本概念
1.1 soft Q-value
τ π Q ( s t , a t ) = r ( s t , a t ) + γ ⋅ E s t + 1 ∼ p [ V ( s t + 1 ) ] \tau ^\pi Q(s_t,a_t)=r(s_t,a_t) + \gamma \cdot E_{s_{t +1}\sim p}[V(s_{t+1})] τπQ(st,at)=r(st,at)+γ⋅Est+1∼p[V(st+1)]
1.2 soft state value function
V ( s t ) = E a t ∼ π [ Q ( s t , a t ) − α ⋅ l o g π ( a t ∣ s t ) ] V(s_t)=E_{a_t \sim \pi}[Q(s_t,a_t)-\alpha \cdot log\pi(a_t|s_t)] V(st)=Eat∼π[Q(st,at)−α⋅logπ(at∣st)]
1.3 Soft Policy Evaluation
Q
k
+
1
=
τ
π
Q
k
Q^{k+1}=\tau^\pi Q^k
Qk+1=τπQk
当k趋于无穷时,
Q
k
Q^k
Qk将收敛至
π
\pi
π的soft Q-value。
证明:
r
π
(
s
t
,
a
t
)
=
r
(
s
t
,
a
t
)
+
γ
⋅
E
s
t
+
1
∼
p
[
H
(
π
(
⋅
∣
s
t
+
1
)
)
]
r_\pi(s_t,a_t)=r(s_t,a_t)+\gamma \cdot E_{s_{t+1}\sim p}[H(\pi(\cdot | s_{t+1}))]
rπ(st,at)=r(st,at)+γ⋅Est+1∼p[H(π(⋅∣st+1))]
Q
(
s
t
,
a
t
)
=
r
(
s
t
,
a
t
)
+
γ
⋅
E
s
t
+
1
∼
p
[
H
(
π
(
⋅
∣
s
t
+
1
)
)
+
E
s
t
+
1
,
a
t
+
1
∼
ρ
π
[
Q
(
s
t
+
1
,
a
t
+
1
)
]
Q(s_t,a_t) = r(s_t,a_t)+\gamma \cdot E_{s_{t+1}\sim p}[H(\pi(\cdot | s_{t+1})) + E_{s_{t+1},a_{t+1}\sim \rho_\pi}[Q(s_{t+1},a_{t+1})]
Q(st,at)=r(st,at)+γ⋅Est+1∼p[H(π(⋅∣st+1))+Est+1,at+1∼ρπ[Q(st+1,at+1)]
Q
(
s
t
,
a
t
)
=
r
(
s
t
,
a
t
)
+
γ
⋅
E
s
t
+
1
,
a
t
+
1
∼
ρ
π
[
−
l
o
g
(
π
(
a
t
+
1
∣
s
t
+
1
)
)
+
E
s
t
+
1
,
a
t
+
1
∼
ρ
π
[
Q
(
s
t
+
1
,
a
t
+
1
)
]
Q(s_t,a_t) = r(s_t,a_t)+\gamma \cdot E_{s_{t+1},a_{t+1}\sim \rho_\pi}[-log(\pi(a_{t+1} | s_{t+1})) + E_{s_{t+1},a_{t+1}\sim \rho_\pi}[Q(s_{t+1},a_{t+1})]
Q(st,at)=r(st,at)+γ⋅Est+1,at+1∼ρπ[−log(π(at+1∣st+1))+Est+1,at+1∼ρπ[Q(st+1,at+1)]
Q
(
s
t
,
a
t
)
=
r
(
s
t
,
a
t
)
+
γ
⋅
E
s
t
+
1
,
a
t
+
1
∼
ρ
π
[
Q
(
s
t
+
1
,
a
t
+
1
)
−
l
o
g
(
π
(
a
t
+
1
∣
s
t
+
1
)
)
Q(s_t,a_t) = r(s_t,a_t)+\gamma \cdot E_{s_{t+1},a_{t+1}\sim \rho_\pi}[Q(s_{t+1},a_{t+1})-log(\pi(a_{t+1} | s_{t+1}))
Q(st,at)=r(st,at)+γ⋅Est+1,at+1∼ρπ[Q(st+1,at+1)−log(π(at+1∣st+1))
当|A|<∞时,可以保证熵有界,因而能保证收敛。
1.4 policy improvement
π n e w = a r g m i n π ′ ∈ Π D K L ( π ′ ( ⋅ ∣ s t ) ∣ ∣ e x p ( Q π o l d ( s t , ⋅ ) ) Z π o l d ( s t ) ) \pi_{new}=argmin_{\pi^{'}\in \Pi}D_{KL}(\pi^{'}(\cdot|s_t)||\frac{exp(Q^{\pi_{old}}(s_t,\cdot))}{Z^{\pi_{old}}(s_t)}) πnew=argminπ′∈ΠDKL(π′(⋅∣st)∣∣Zπold(st)exp(Qπold(st,⋅)))
1.5 soft policy improvemrnt
Q
π
n
e
w
(
s
t
,
a
t
)
≥
Q
π
o
l
d
(
s
t
,
a
t
)
Q^{\pi_{new}}(s_t,a_t)≥Q^{\pi_{old}}(s_t,a_t)
Qπnew(st,at)≥Qπold(st,at)
s.t.为:
π
o
l
d
∈
Π
,
(
s
t
,
a
t
)
∈
S
×
A
,
∣
A
∣
<
∞
\pi_{old}\in \Pi,(s_t,a_t)\in S × A, |A| < ∞
πold∈Π,(st,at)∈S×A,∣A∣<∞
证明如下:
π
n
e
w
=
a
r
g
m
i
n
π
′
∈
Π
D
K
L
(
π
′
(
⋅
∣
s
t
)
∣
∣
e
x
p
(
Q
π
o
l
d
(
s
t
,
⋅
)
−
l
o
g
(
Z
(
s
t
)
)
)
)
=
a
r
g
m
i
n
π
′
∈
Π
J
π
o
l
d
(
π
′
(
⋅
∣
s
t
)
)
\pi_{new}=argmin_{\pi^{'}\in \Pi}D_{KL}(\pi^{'}(\cdot|s_t)||exp(Q^{\pi_{old}}(s_t,\cdot)-log(Z(s_t))))\\ =argmin_{\pi^{'}\in \Pi}J_{\pi_{old}}(\pi^{'}(\cdot|s_t))
πnew=argminπ′∈ΠDKL(π′(⋅∣st)∣∣exp(Qπold(st,⋅)−log(Z(st))))=argminπ′∈ΠJπold(π′(⋅∣st))
J
π
o
l
d
(
π
′
(
⋅
∣
s
t
)
)
=
E
a
t
∼
π
′
[
l
o
g
(
π
′
(
s
t
,
a
t
)
)
−
Q
π
o
l
d
(
s
t
,
a
t
)
+
l
o
g
(
Z
(
s
t
)
)
]
J_{\pi_{old}}(\pi^{'}(\cdot|s_t)) = E_{a_t \sim \pi^{'}}[log(\pi^{'}(s_t,a_t))-Q^{\pi_{old}}(s_t,a_t)+log(Z(s_t))]
Jπold(π′(⋅∣st))=Eat∼π′[log(π′(st,at))−Qπold(st,at)+log(Z(st))]
由于一直可以取
π
n
e
w
=
π
o
l
d
\pi_{new}=\pi_{old}
πnew=πold,所有总能满足:
E
a
t
∼
π
n
e
w
[
l
o
g
(
π
n
e
w
(
a
t
∣
s
t
)
)
−
Q
π
o
l
d
(
s
t
,
a
t
)
]
≤
E
a
t
∈
π
o
l
d
[
l
o
g
(
π
o
l
d
(
a
t
∣
s
t
)
)
−
Q
π
o
l
d
(
s
t
,
a
t
)
]
E_{a_t\sim \pi_{new}}[log(\pi_{new}(a_t|s_t))-Q^{\pi_{old}}(s_t,a_t)]≤E_{a_t \in \pi_{old}}[log(\pi_{old}(a_t|s_t))-Q^{\pi_{old}}(s_t,a_t)]
Eat∼πnew[log(πnew(at∣st))−Qπold(st,at)]≤Eat∈πold[log(πold(at∣st))−Qπold(st,at)]
E
a
t
∼
π
n
e
w
[
l
o
g
(
π
n
e
w
(
a
t
∣
s
t
)
)
−
Q
π
o
l
d
(
s
t
,
a
t
)
]
≤
−
V
π
o
l
d
(
s
t
)
E
a
t
∼
π
n
e
w
[
Q
π
o
l
d
(
s
t
,
a
t
)
−
l
o
g
(
π
n
e
w
(
a
t
∣
s
t
)
)
]
≥
V
π
o
l
d
(
s
t
)
E_{a_t\sim \pi_{new}}[log(\pi_{new}(a_t|s_t))-Q^{\pi_{old}}(s_t,a_t)]≤ - V^{\pi_{old}}(s_t)\\E_{a_t\sim \pi_{new}}[Q^{\pi_{old}}(s_t,a_t)-log(\pi_{new}(a_t|s_t))]≥V^{\pi_{old}}(s_t)
Eat∼πnew[log(πnew(at∣st))−Qπold(st,at)]≤−Vπold(st)Eat∼πnew[Qπold(st,at)−log(πnew(at∣st))]≥Vπold(st)
Q
π
o
l
d
(
s
t
,
a
t
)
=
r
(
s
t
,
a
t
)
+
γ
⋅
E
s
t
+
1
∼
p
[
V
π
o
l
d
(
s
t
+
1
)
]
≤
r
(
s
t
,
a
t
)
+
γ
⋅
E
s
t
+
1
∼
p
E
a
t
+
1
∼
π
n
e
w
[
Q
π
o
l
d
(
s
t
,
a
t
)
−
l
o
g
(
π
n
e
w
(
a
t
∣
s
t
)
]
≤
.
.
.
.
.
.
.
.
.
.
≤
Q
π
n
e
w
(
s
t
,
a
t
)
Q^{\pi_{old}}(s_t,a_t)=r(s_t,a_t)+\gamma \cdot E_{s_{t+1}\sim p }[V^{\pi_{old}}(s_{t+1})]\\ ≤r(s_t,a_t)+\gamma \cdot E_{s_{t+1}\sim p E_{a_{t+1}\sim \pi_{new}}}[Q^{\pi_{old}}(s_t,a_t)-log(\pi_{new}(a_t|s_t)]\\ ≤..........\\ ≤Q^{\pi_{new}}(s_t,a_t)
Qπold(st,at)=r(st,at)+γ⋅Est+1∼p[Vπold(st+1)]≤r(st,at)+γ⋅Est+1∼pEat+1∼πnew[Qπold(st,at)−log(πnew(at∣st)]≤..........≤Qπnew(st,at)
1.5 soft policy iteration
假设:
∣
A
∣
<
∞
;
π
∈
Π
|A|<∞;\pi\in\Pi
∣A∣<∞;π∈Π
经过不断地soft policy evaluation和policy improvement,最终policy会收敛至
π
⋆
\pi^{\star}
π⋆,其满足
Q
π
⋆
(
s
t
,
a
t
)
≥
Q
π
(
s
t
,
a
t
)
;其中
π
∈
Π
Q^{\pi^\star}(s_t,a_t)≥Q^{\pi}(s_t,a_t);其中\pi\in\Pi
Qπ⋆(st,at)≥Qπ(st,at);其中π∈Π
2. soft actor critic
2.1 soft value function
- loss function
J V ( ψ ) = E s t ∼ D [ 1 2 ( V ψ ( s t ) − E a t ∼ π ϕ [ Q θ ( s t , a t ) − l o g ( π ϕ ( a t ∣ s t ) ) ) ] 2 ] J_V(\psi) = E_{s_t\sim D}[\frac{1}{2}(V_\psi(s_t)-E_{a_t\sim \pi_\phi}[Q_{\theta}(s_t,a_t)-log(\pi_\phi(a_t|s_t)))]^2] JV(ψ)=Est∼D[21(Vψ(st)−Eat∼πϕ[Qθ(st,at)−log(πϕ(at∣st)))]2] - gradient
∇ ^ ψ J V ( ψ ) = ∇ ψ V ψ ( s t ) ⋅ ( V ψ ( s t ) − Q θ ( s t , a t ) + l o g ( π ϕ ( a t ∣ s t ) ) ) \hat\nabla_\psi J_V(\psi)=\nabla_\psi V_\psi(s_t)\cdot(V_\psi(s_t)-Q_\theta(s_t,a_t)+log(\pi_\phi(a_t|s_t))) ∇^ψJV(ψ)=∇ψVψ(st)⋅(Vψ(st)−Qθ(st,at)+log(πϕ(at∣st)))
2.2 soft Q-function
- loss function
J Q ( θ ) = E ( s t , a t ) ∼ D [ 1 2 ( Q θ ( s t , a t ) − Q ^ ( s t , a t ) ) 2 ] J_Q(\theta)=E_{(s_t,a_t)\sim D}[\frac{1}{2}(Q_\theta(s_t,a_t)-\hat Q(s_t,a_t))^2] JQ(θ)=E(st,at)∼D[21(Qθ(st,at)−Q^(st,at))2]
Q ^ ( s t , a t ) = r ( s t , a t ) + γ ⋅ E s t + 1 ∼ p [ V ψ ˉ ( s t + 1 ) ] \hat Q(s_t,a_t)=r(s_t,a_t)+\gamma\cdot E_{s_{t+1}\sim p}[V_{\bar{\psi}} (s_{t+1})] Q^(st,at)=r(st,at)+γ⋅Est+1∼p[Vψˉ(st+1)] - gradient
∇ ^ θ J Q ( θ ) = ∇ θ Q θ ( s t , a t ) ⋅ [ Q θ ( s t , a t ) − r ( s t , a t ) − γ ⋅ V ψ ˉ ( s t + 1 ) ] \hat\nabla_\theta J_Q(\theta)=\nabla_\theta Q_\theta(s_t,a_t)\cdot[Q_\theta(s_t,a_t)-r(s_t,a_t)-\gamma \cdot V_{\bar\psi}(s_{t+1})] ∇^θJQ(θ)=∇θQθ(st,at)⋅[Qθ(st,at)−r(st,at)−γ⋅Vψˉ(st+1)]
2.3 policy improvement
- loss function
J π ( ϕ ) = E s t ∼ D [ D K L ( π ϕ ( ⋅ ∣ s t ) ∣ ∣ e x p ( Q θ ( s t , ⋅ ) ) Z θ ( s t ) ) ] J_\pi(\phi)=E_{s_t\sim D}[D_{KL}(\pi_\phi(\cdot|s_t)||\frac{exp(Q_\theta(s_t,\cdot))}{Z_\theta(s_t)})] Jπ(ϕ)=Est∼D[DKL(πϕ(⋅∣st)∣∣Zθ(st)exp(Qθ(st,⋅)))]
reparameterize the policy
a t = f ϕ ( ϵ t ; s t ) = f ϕ μ ( s t ) + ϵ t ⋅ f ϕ σ ( s t ) a_t=f_\phi(\epsilon_t;s_t)=f_\phi^\mu(s_t)+\epsilon_t\cdot f_\phi^\sigma(s_t) at=fϕ(ϵt;st)=fϕμ(st)+ϵt⋅fϕσ(st)
J π ( ϕ ) = E s t ∼ D ; ϵ t ∈ N [ l o g ( π ϕ ( f ϕ ( ϵ t ; s t ) ∣ s t ) ) − Q θ ( s t , f ϕ ( ϵ t ; s t ) ) ] J_\pi(\phi)=E_{s_t\sim D;\epsilon_t\in N}[log(\pi_\phi(f_\phi(\epsilon_t;s_t)|s_t))-Q_\theta(s_t,f_\phi(\epsilon_t;s_t))] Jπ(ϕ)=Est∼D;ϵt∈N[log(πϕ(fϕ(ϵt;st)∣st))−Qθ(st,fϕ(ϵt;st))] - gradient
∇ θ E q θ ( Z ) [ f θ ( Z ) ] = E q θ ( Z ) [ ∂ f θ ( Z ) ∂ θ ] + E q θ ( Z ) [ d f θ ( Z ) d Z ⋅ d Z d θ ] \nabla_\theta E_{q_\theta(Z)}[f_\theta(Z)]=E_{q_\theta(Z)}[\frac{\partial f_\theta(Z)}{\partial \theta}] + E_{q_\theta(Z)}[\frac{df_\theta(Z)}{dZ}\cdot\frac{dZ}{d\theta}] ∇θEqθ(Z)[fθ(Z)]=Eqθ(Z)[∂θ∂fθ(Z)]+Eqθ(Z)[dZdfθ(Z)⋅dθdZ]
∇ ^ ϕ J π ( ϕ ) = ∇ ϕ l o g ( π ϕ ( a t ; s t ) ∣ s t ) ) + ∇ ϕ f ϕ ( ϵ t ; s t ) ⋅ ( ∇ a t l o g ( π ( a t ∣ s t ) ) − ∇ a t Q θ ( s t , a t ) ) \hat \nabla_\phi J_\pi(\phi)=\nabla_\phi log(\pi_\phi(a_t;s_t)|s_t))+\nabla_{\phi}f_\phi(\epsilon_t;s_t)\cdot(\nabla_{a_t}log(\pi(a_t|s_t))-\nabla_{a_t} Q_\theta(s_t,a_t)) ∇^ϕJπ(ϕ)=∇ϕlog(πϕ(at;st)∣st))+∇ϕfϕ(ϵt;st)⋅(∇atlog(π(at∣st))−∇atQθ(st,at))
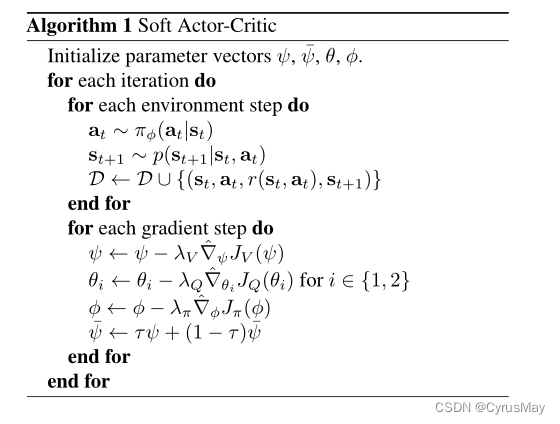
3. 算法流程
By CyrusMay 2022.09.06
世界 再大 不过 你和我
用最小回忆 堆成宇宙
————五月天(因为你 所以我)————