用Python进行数学建模(二)
一、微分方程模型
微分方程是描述系统的状态随时间和空间演化的数学工具。物理中许多涉及变力的运动学、动力学问题,如空气的阻力为速度函数的落体运动等问题,很多可以用微分方程求解。微分方程在化学、工程学、经济学和人口统计等领域也有广泛应用。
具体来说,微分方程是指含有未知函数及其导数的关系式。
微分方程的数学建模其实并不复杂,基本过程就是分析题目属于哪一类问题、可以选择什么微分方程模型,然后如何使用现有的微分方程模型建模。
1.微分方程的数值解法
微分方程的数值求解是先把时间和空间离散化,然后将微分化为差分,建立递推关系,然后反复进行迭代计算,得到任意时间和空间的值。
2.SciPy 求解常微分方程(组)
1.一阶常微分方程(组)模型
2.scipy.integrate.odeint() 函数
函数原型

参数解释
func:callable(y, t, …) or callable(t, y, …)
计算y在t点的导数。如果签名是可调用的(t, y,…),那么参数tfirst必须设置为True。
y0:array
y的初始条件 (可以是vector).
t:array
要解出y的时间点序列。初值点应该是这个序列的第一个元素。这个序列必须是单调递增或单调递减的;允许重复值。
args:tuple, optional
向导数函数 func 传递参数。当导数函数 f ( y , t , p 1 , p 2 , . . ) f(y,t,p1,p2,…)f(y,t,p1,p2,…) 包括可变参数 p1,p2… 时,通过 args =(p1,p2,…) 可以将参数p1,p2… 传递给导数函数 func。
odeint 的主要返回值
y: array
数组,形状为 (len(t),len(y0),给出时间序列 t 中每个时刻的 y 值。
3.Scipy 求解一阶常微分方程
1.scipy.integrate.odeint() 求解常微分方程初值问题的步骤
2.求微分方程的数值解

from scipy.integrate import odeint # 导入 scipy.integrate 模块
import numpy as np
import matplotlib.pyplot as plt
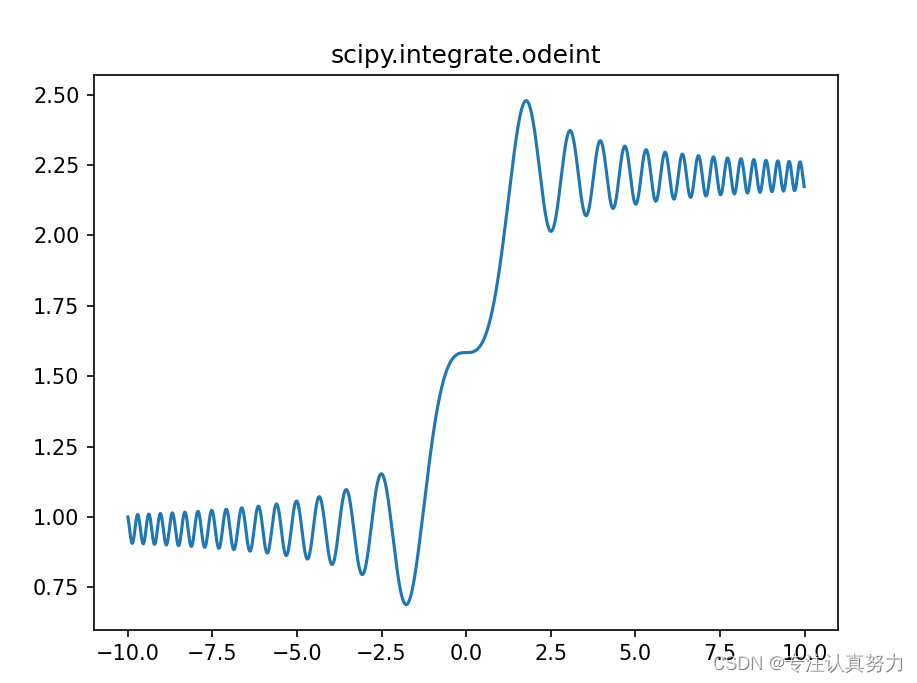
def dy_dt(y, t): # 定义函数 f(y,t)
return np.sin(t**2)
y0 = [1] # y0 = 1 也可以
t = np.arange(-10,10,0.01) # (start,stop,step)
y = odeint(dy_dt, y0, t) # 求解微分方程初值问题
# 绘图
plt.plot(t, y)
plt.title("scipy.integrate.odeint")
plt.show()
4.Scipy 求解一阶常微分方程组
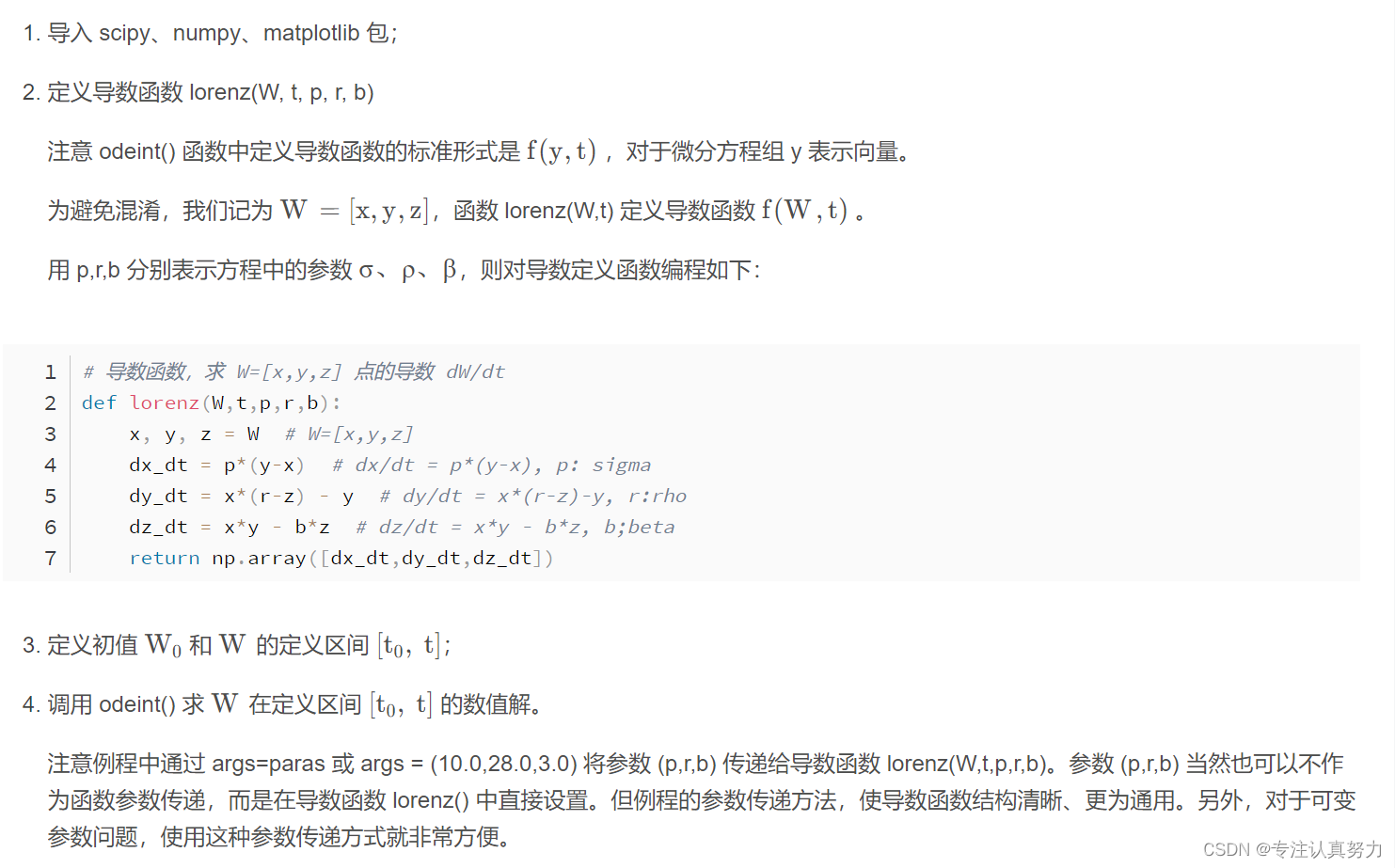
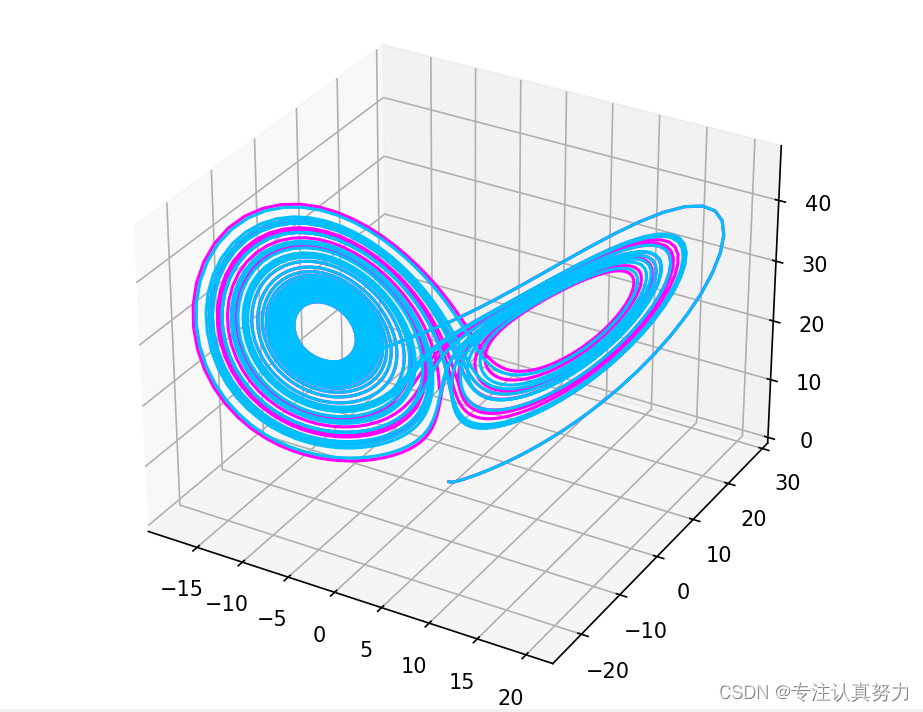
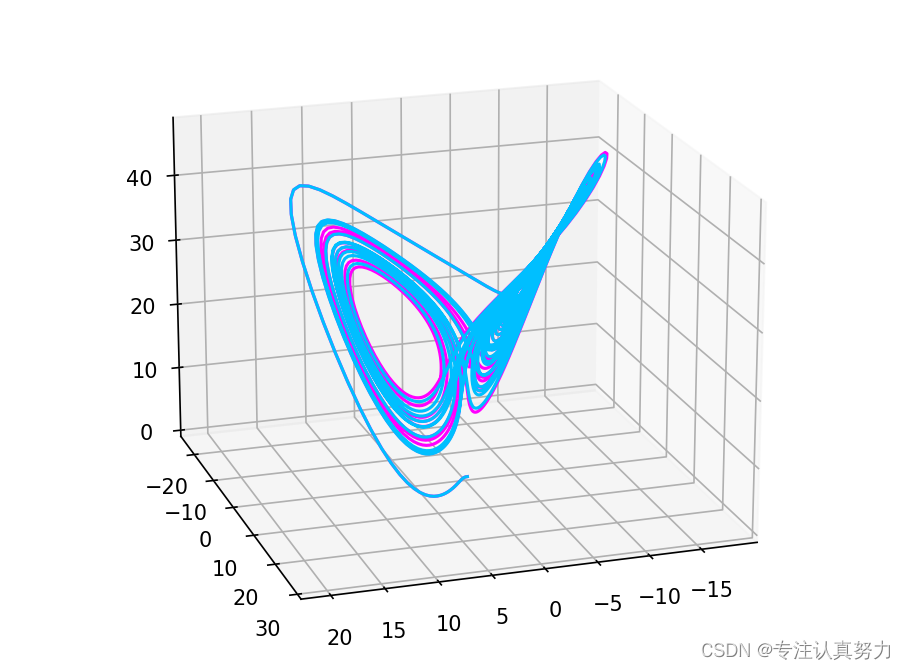
1.求洛伦兹(Lorenz)方程的数值解
2.洛伦兹(Lorenz)方程问题的编程步骤
3.代码
from scipy.integrate import odeint # 导入 scipy.integrate 模块
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# 导数函数, 求 W=[x,y,z] 点的导数 dW/dt
def lorenz(W, t, p, r, b):
x, y, z = W # W=[x,y,z]
dx_dt = p * (y - x) # dx/dt = p*(y-x), p: sigma
dy_dt = x * (r - z) - y # dy/dt = x*(r-z)-y, r:rho
dz_dt = x * y - b * z # dz/dt = x*y - b*z, b;beta
return np.array([dx_dt, dy_dt, dz_dt])
t = np.arange(0, 30, 0.01) # 创建时间点 (start,stop,step)
paras = (10.0, 28.0, 3.0) # 设置 Lorenz 方程中的参数 (p,r,b)
# 调用ode对lorenz进行求解, 用两个不同的初始值 W1、W2 分别求解
W1 = (0.0, 1.00, 0.0) # 定义初值为 W1
track1 = odeint(lorenz, W1, t, args=(10.0, 28.0, 3.0)) # args 设置导数函数的参数
W2 = (0.0, 1.01, 0.0) # 定义初值为 W2
track2 = odeint(lorenz, W2, t, args=paras) # 通过 paras 传递导数函数的参数
# 绘图
fig = plt.figure()
ax = Axes3D(fig, auto_add_to_figure=False)
fig.add_axes(ax)
ax.plot(track1[:, 0], track1[:, 1], track1[:, 2], color='magenta') # 绘制轨迹 1
ax.plot(track2[:, 0], track2[:, 1], track2[:, 2], color='deepskyblue') # 绘制轨迹 2
ax.set_title("Lorenz attractor by scipy.integrate.odeint")
plt.show()
4.结果
5.Scipy 求解高阶常微分方程
高阶常微分方程,必须做变量替换,化为一阶微分方程组,再用 odeint 求数值解。
1.求二阶 RLC 振荡电路的数值解
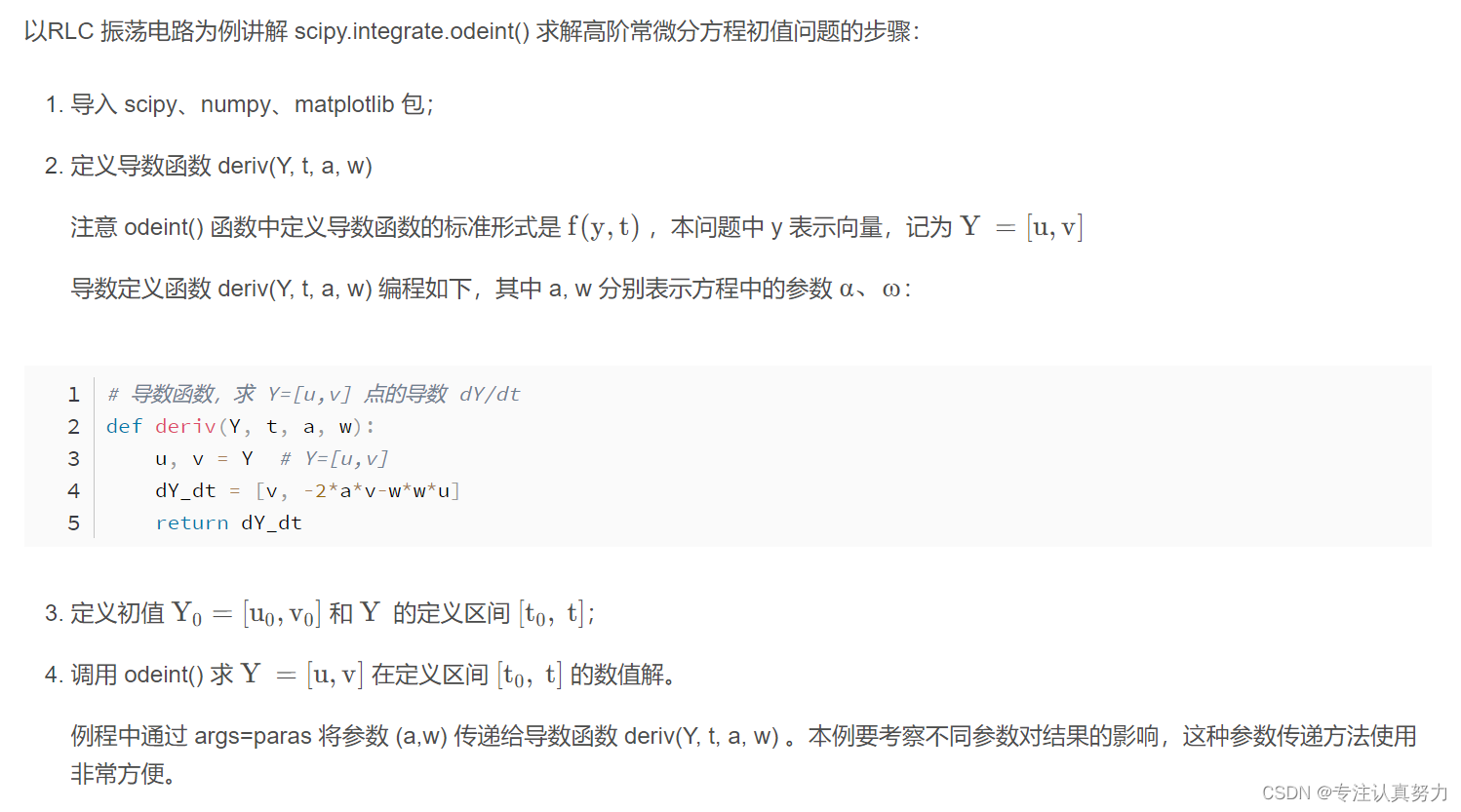
2.二阶微分方程问题的编程步骤
3.代码
from scipy.integrate import odeint # 导入 scipy.integrate 模块
import numpy as np
import matplotlib.pyplot as plt
# 导数函数,求 Y=[u,v] 点的导数 dY/dt
def deriv(Y, t, a, w):
u, v = Y # Y=[u,v]
dY_dt = [v, -2 * a * v - w * w * u]
return dY_dt
t = np.arange(0, 20, 0.01) # 创建时间点 (start,stop,step)
# 设置导数函数中的参数 (a, w)
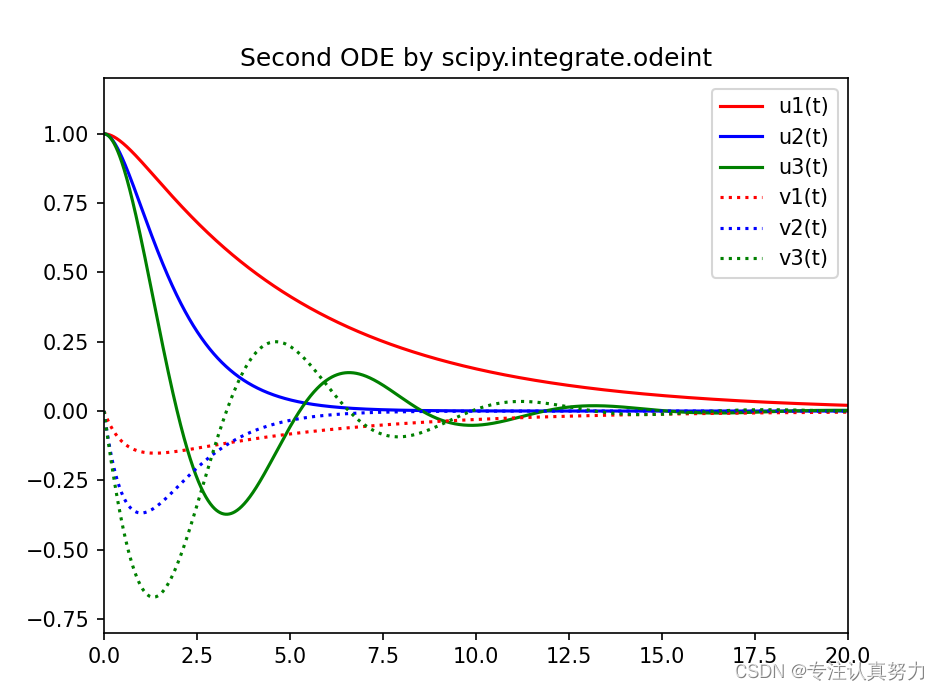
paras1 = (1, 0.6) # 过阻尼:a^2 - w^2 > 0
paras2 = (1, 1) # 临界阻尼:a^2 - w^2 = 0
paras3 = (0.3, 1) # 欠阻尼:a^2 - w^2 < 0
# 调用ode对进行求解, 用两个不同的初始值 W1、W2 分别求解
Y0 = (1.0, 0.0) # 定义初值为 Y0=[u0,v0]
Y1 = odeint(deriv, Y0, t, args=paras1) # args 设置导数函数的参数
Y2 = odeint(deriv, Y0, t, args=paras2) # args 设置导数函数的参数
Y3 = odeint(deriv, Y0, t, args=paras3) # args 设置导数函数的参数
# 绘图
plt.plot(t, Y1[:, 0], 'r-', label='u1(t)')
plt.plot(t, Y2[:, 0], 'b-', label='u2(t)')
plt.plot(t, Y3[:, 0], 'g-', label='u3(t)')
plt.plot(t, Y1[:, 1], 'r:', label='v1(t)')
plt.plot(t, Y2[:, 1], 'b:', label='v2(t)')
plt.plot(t, Y3[:, 1], 'g:', label='v3(t)')
plt.axis([0, 20, -0.8, 1.2])
plt.legend(loc='best')
plt.title("Second ODE by scipy.integrate.odeint")
plt.show()
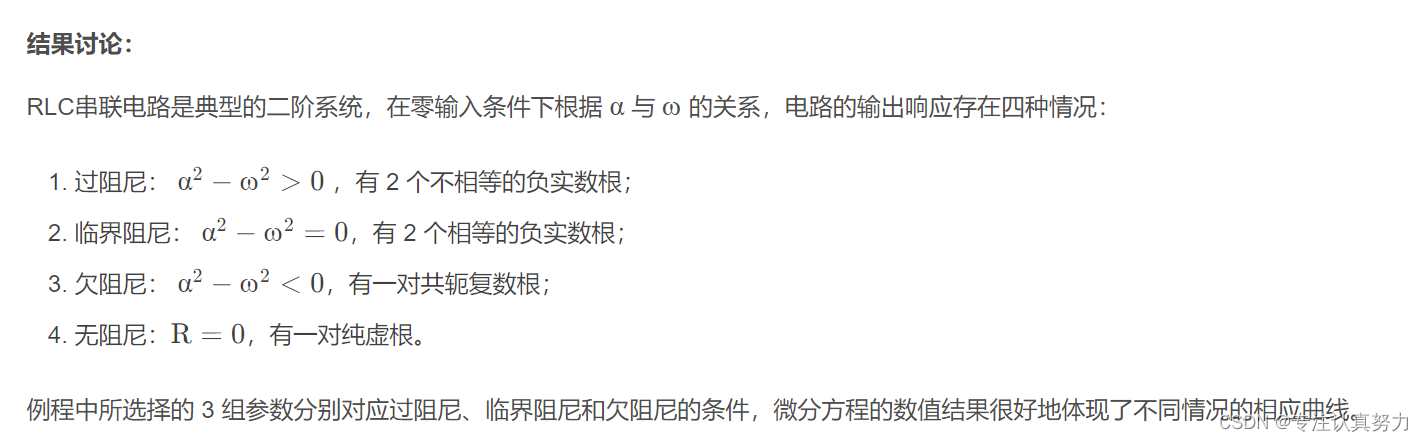
4.结果
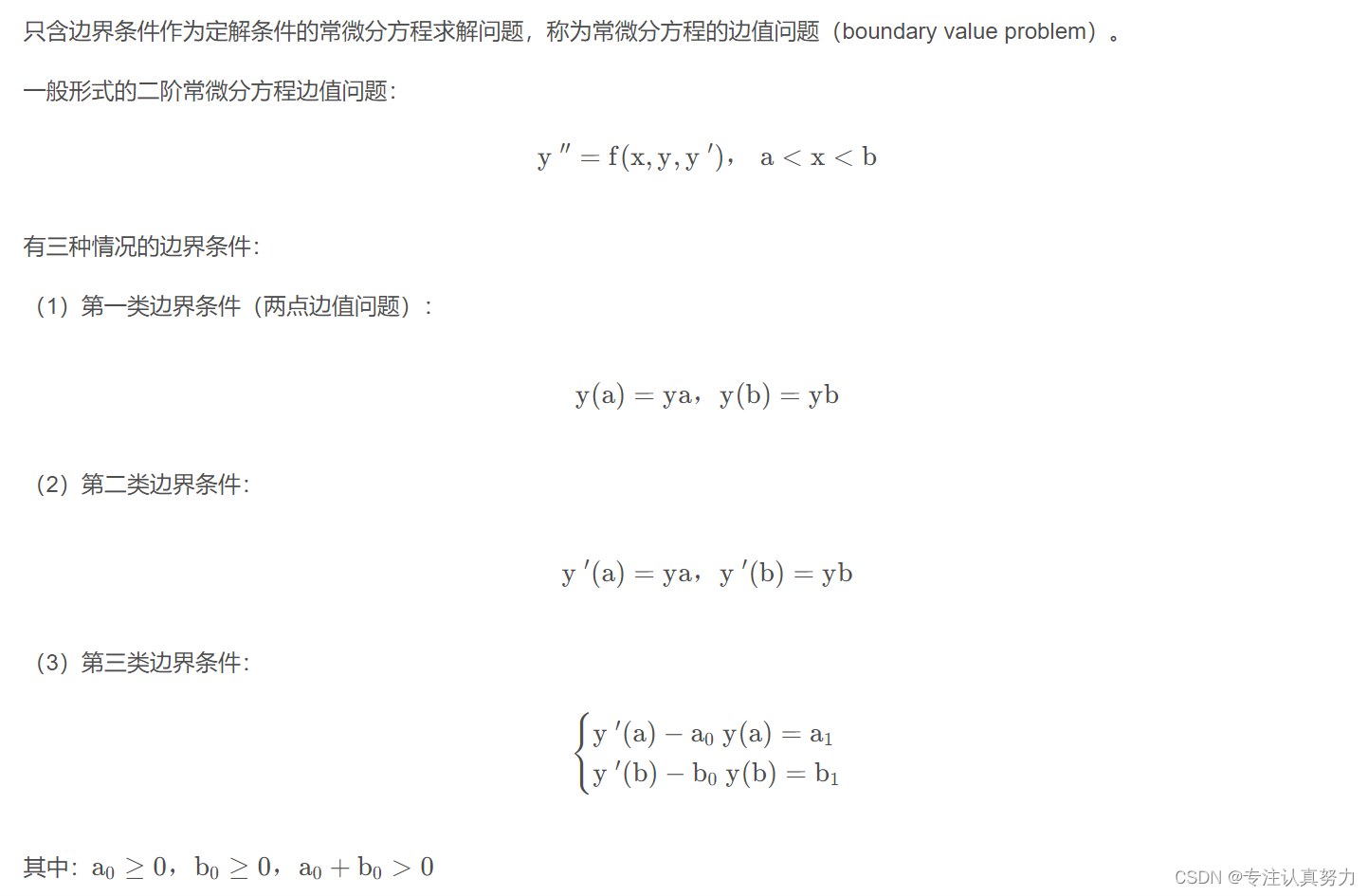
二、微分方程边值问题(BVP)
微分方程是指含有未知函数及其导数的关系式。
微分方程是描述系统的状态随时间和空间演化的数学工具。
微分方程分为初值问题和边值问题。初值问题是已知微分方程的初始条件,即自变量为零时的函数值,一般可以用欧拉法、龙哥库塔法来求解。边值问题则是已知微分方程的边界条件,即自变量在边界点时的函数值。
1.常微分方程边值问题的数学模型
2.SciPy 求解常微分方程边值问题
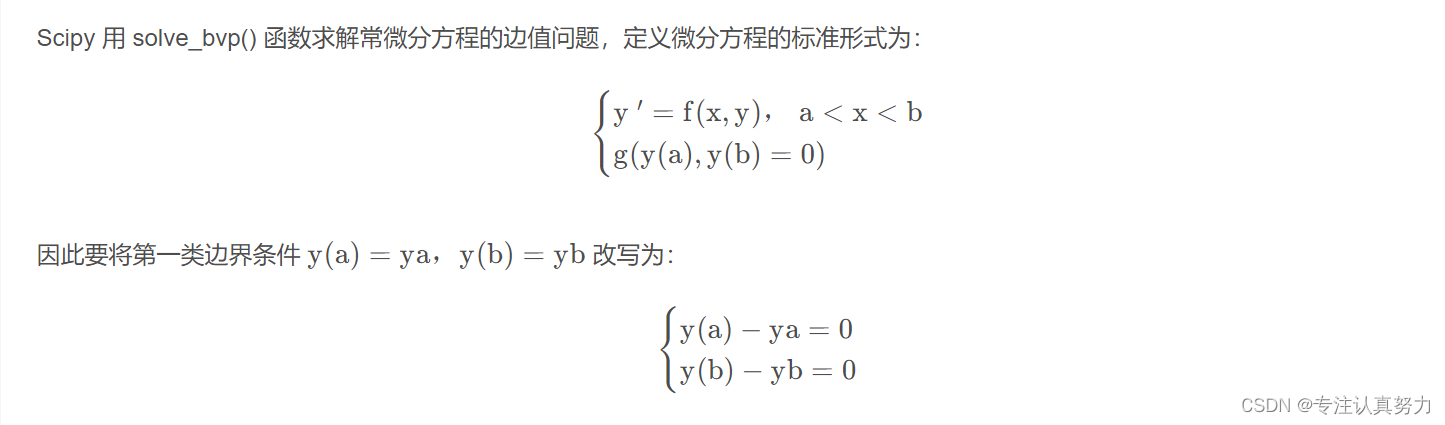
1.BVP 问题的标准形式
2.scipy.integrate.solve_bvp() 函数
可以求解一阶微分方程(组)的两点边值问题(第一类边界条件)。

solve_bvp 的主要参数:
func: callable fun(x, y, …) 导数函数 f ( y , x ) f(y,x)f(y,x) , y 在 x 处的导数,以函数的形式表示。可以带有参数 p。
bc: callable bc(ya, yb, …) 边界条件,y 在两点边界的函数,以函数的形式表示。可以带有参数 p。
x: array: 初始网格的序列,shape (m,)。必须是单调递增的实数序列,起止于两点边界值 xa,xb。
y: array: 网格节点处函数值的初值,shape (n,m),第 i 列对应于 x[i]。
solve_bvp 的主要返回值:
sol: PPoly 通过 PPoly (如三次连续样条函数)插值求出网格节点处的 y 值。
x: array 数组,形状为 (m,),最终输出的网格节点。
y: array 二维数组,形状为 (n,m),输出的网格节点处的 y 值。
yp: array 二维数组,形状为 (n,m),输出的网格节点处的 y’ 值。
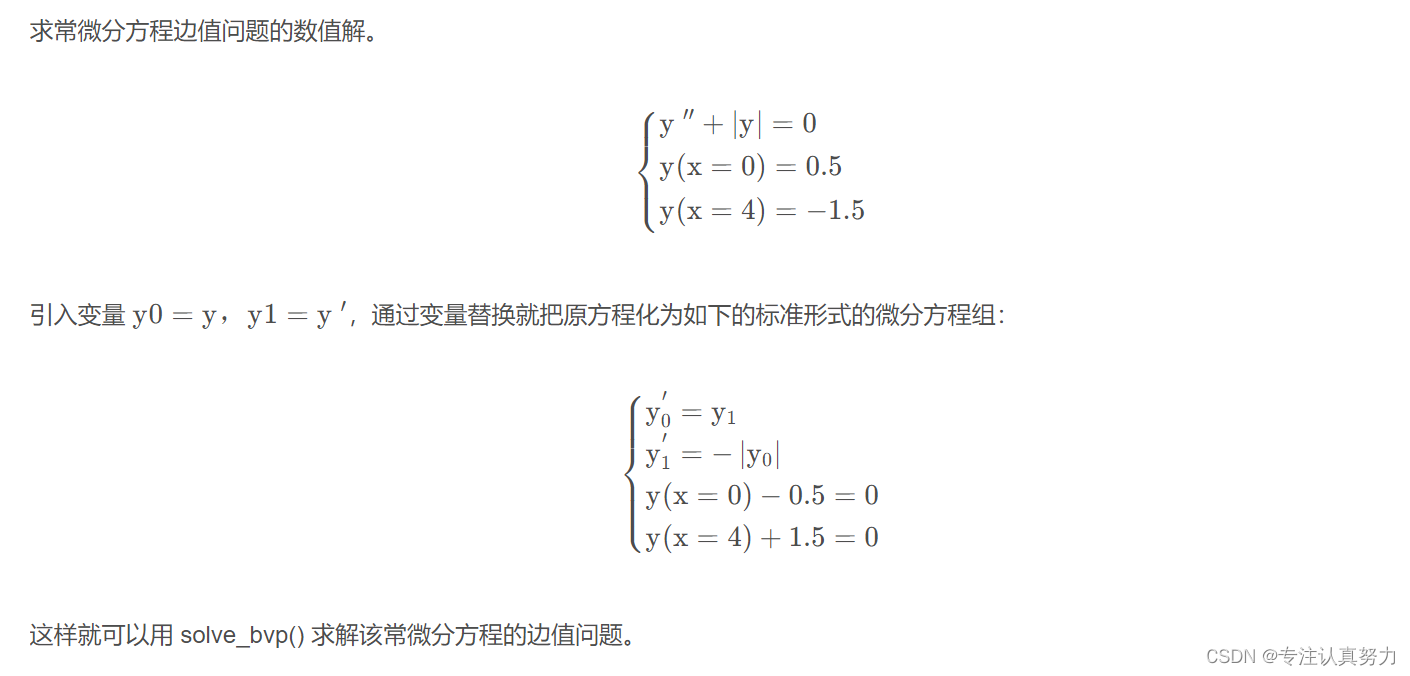
3.一阶常微分方程边值问题
1.标准化
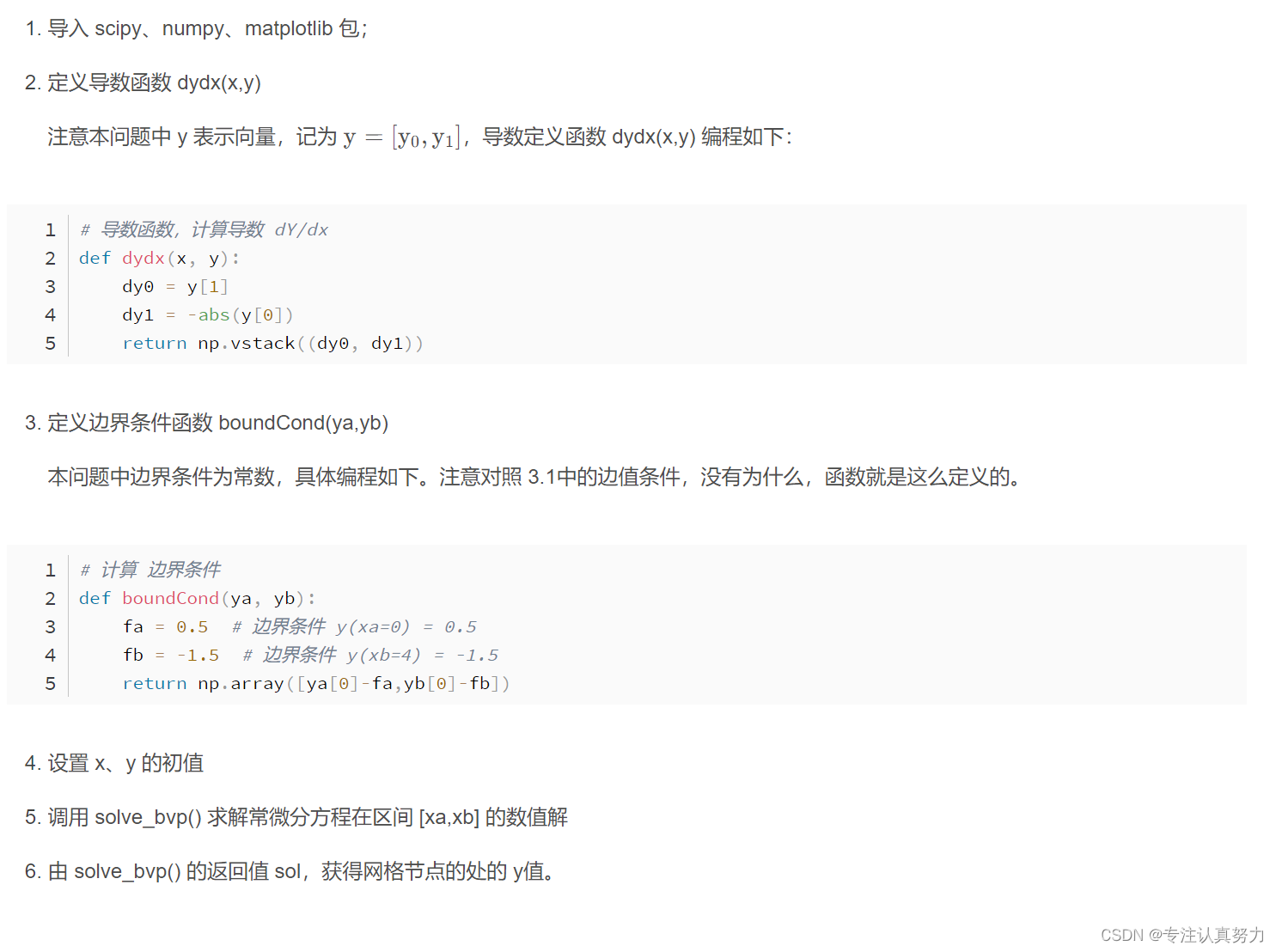
2.编程步骤
3.代码
from scipy.integrate import odeint, solve_bvp
import numpy as np
import matplotlib.pyplot as plt
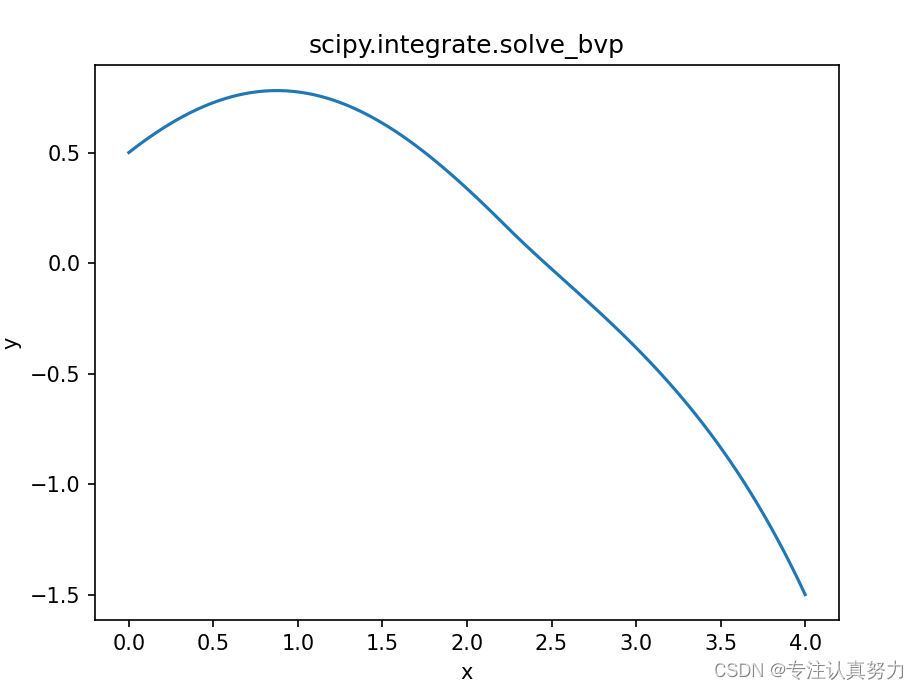
# 1. 求解微分方程组边值问题,DEMO
# y'' + abs(y) = 0, y(0)=0.5, y(4)=-1.5
# 导数函数,计算导数 dY/dx
def dydx(x, y):
dy0 = y[1]
dy1 = -abs(y[0])
return np.vstack((dy0, dy1))
# 计算 边界条件
def boundCond(ya, yb):
fa = 0.5 # 边界条件 y(xa=0) = 0.5
fb = -1.5 # 边界条件 y(xb=4) = -1.5
return np.array([ya[0] - fa, yb[0] - fb])
xa, xb = 0, 4 # 边界点 (xa,xb)
# fa, fb = 0.5, -1.5 # 边界点的 y值
xini = np.linspace(xa, xb, 11) # 确定 x 的初值
yini = np.zeros((2, xini.size)) # 确定 y 的初值
res = solve_bvp(dydx, boundCond, xini, yini) # 求解 BVP
xSol = np.linspace(xa, xb, 100) # 输出的网格节点
ySol = res.sol(xSol)[0] # 网格节点处的 y 值
plt.plot(xSol, ySol, label='y')
plt.xlabel("x")
plt.ylabel("y")
plt.title("scipy.integrate.solve_bvp")
plt.show()
4.执行结果
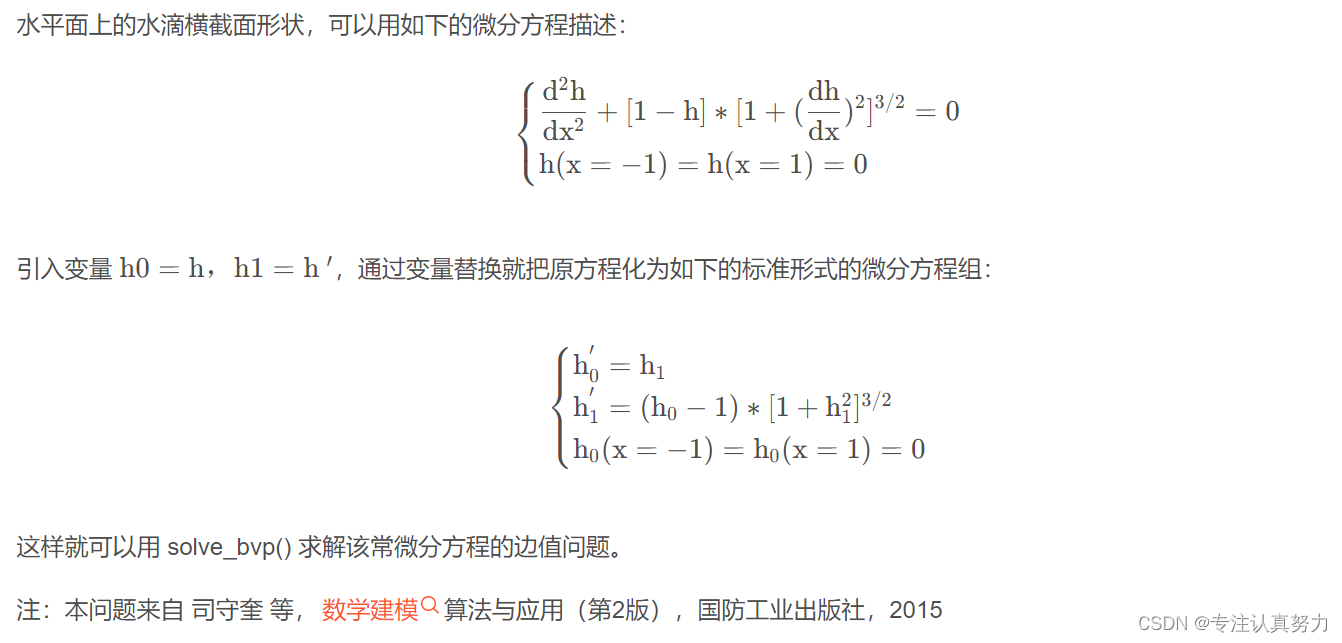
4.水滴横截面的形状
from scipy.integrate import odeint, solve_bvp
import numpy as np
import matplotlib.pyplot as plt
# 3. 求解微分方程边值问题,水滴的横截面
# 导数函数,计算 h=[h0,h1] 点的导数 dh/dx
def dhdx(x, h):
# 计算 dh0/dx, dh1/dx 的值
dh0 = h[1] # 计算 dh0/dx
dh1 = (h[0] - 1) * (1 + h[1] * h[1]) ** 1.5 # 计算 dh1/dx
return np.vstack((dh0, dh1))
# 计算 边界条件
def boundCond(ha, hb):
# ha = 0 # 边界条件:h0(x=-1) = 0
# hb = 0 # 边界条件:h0(x=1) = 0
return np.array([ha[0], hb[0]])
xa, xb = -1, 1 # 边界点 (xa=0, xb=1)
xini = np.linspace(xa, xb, 11) # 设置 x 的初值
hini = np.zeros((2, xini.size)) # 设置 h 的初值
res = solve_bvp(dhdx, boundCond, xini, hini) # 求解 BVP
# scipy.integrate.solve_bvp(fun, bc, x, y,..)
# fun(x, y, ..), 导数函数 f(y,x),y在 x 处的导数。
# bc(ya, yb, ..), 边界条件,y 在两点边界的函数。
# x: shape (m),初始网格的序列,起止于两点边界值 xa,xb。
# y: shape (n,m),网格节点处函数值的初值,第 i 列对应于 x[i]。
xSol = np.linspace(xa, xb, 100) # 输出的网格节点
hSol = res.sol(xSol)[0] # 网格节点处的 h 值
plt.plot(xSol, hSol, label='h(x)')
plt.xlabel("x")
plt.ylabel("h(x)")
plt.axis([-1, 1, 0, 1])
plt.title("Cross section of water drop by BVP")
plt.show()
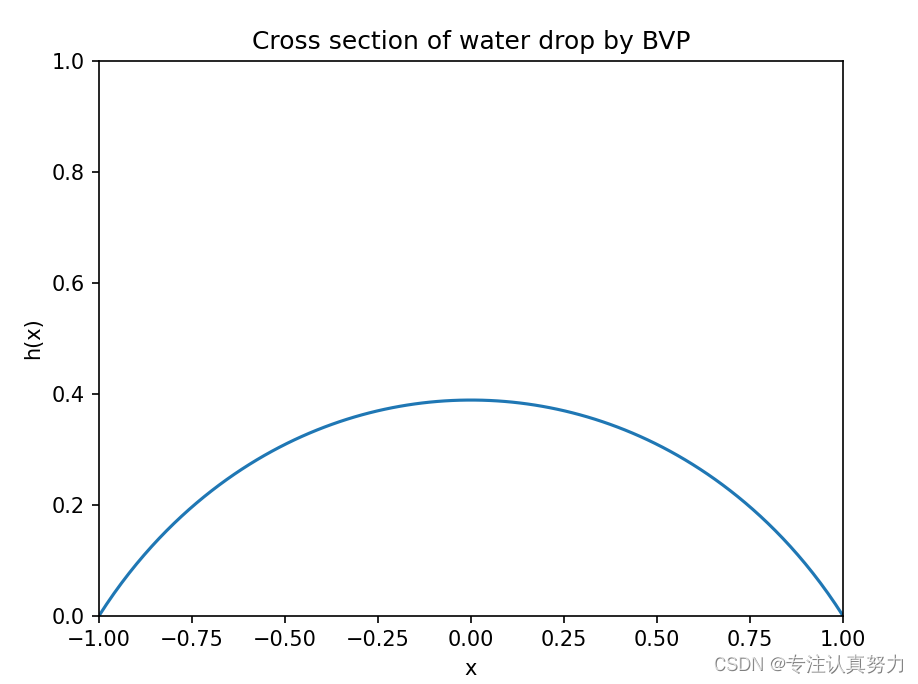
5.带有未知参数的微分方程边值问题
from scipy.integrate import odeint, solve_bvp
import numpy as np
import matplotlib.pyplot as plt
# 4. 求解微分方程组边值问题,Mathieu 方程
# y0' = y1, y1' = -(lam-2*q*cos(2x))y0)
# y0(0)=1, y1(0)=0, y1(pi)=0
# 导数函数,计算导数 dY/dx
def dydx(x, y, p): # p 是待定参数
lam = p[0]
q = 10
dy0 = y[1]
dy1 = -(lam - 2 * q * np.cos(2 * x)) * y[0]
return np.vstack((dy0, dy1))
# 计算 边界条件
def boundCond(ya, yb, p):
lam = p[0]
return np.array([ya[0] - 1, ya[0], yb[0]])
xa, xb = 0, np.pi # 边界点 (xa,xb)
xini = np.linspace(xa, xb, 11) # 确定 x 的初值
xSol = np.linspace(xa, xb, 100) # 输出的网格节点
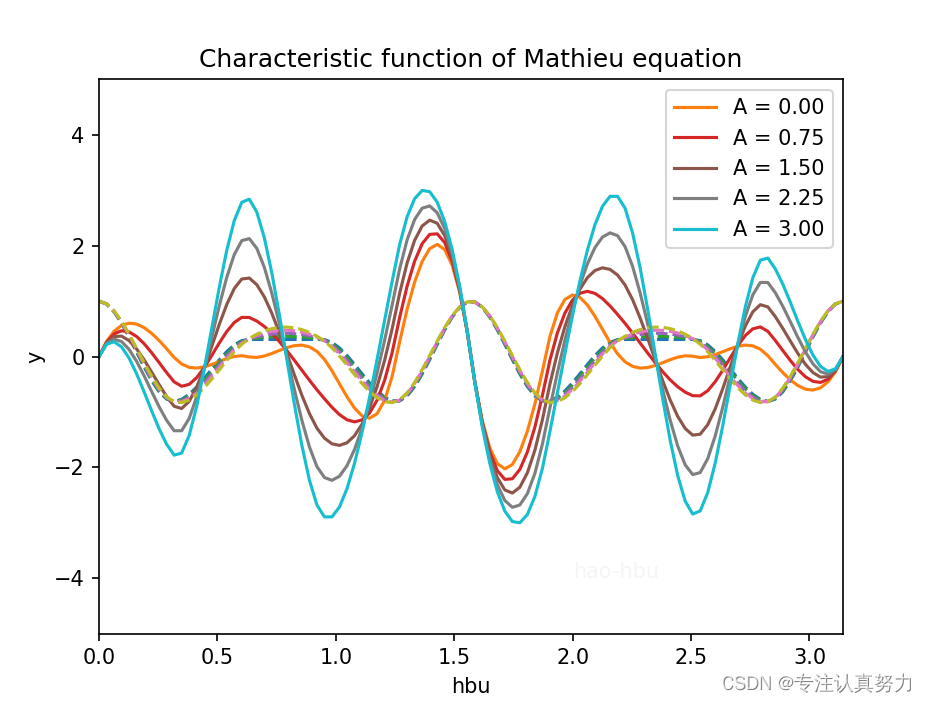
for k in range(5):
A = 0.75 * k
y0ini = np.cos(8 * xini) # 设置 y0 的初值
y1ini = -A * np.sin(8 * xini) # 设置 y1 的初值
yini = np.vstack((y0ini, y1ini)) # 确定 y=[y0,y1] 的初值
res = solve_bvp(dydx, boundCond, xini, yini, p=[10]) # 求解 BVP
y0 = res.sol(xSol)[0] # 网格节点处的 y 值
y1 = res.sol(xSol)[1] # 网格节点处的 y 值
plt.plot(xSol, y0, '--')
plt.plot(xSol, y1, '-', label='A = {:.2f}'.format(A))
plt.xlabel("hbu")
plt.ylabel("y")
plt.title("Characteristic function of Mathieu equation")
plt.axis([0, np.pi, -5, 5])
plt.legend(loc='best')
plt.text(2, -4, "hao-hbu", color='whitesmoke')
plt.show()
三、非线性规划
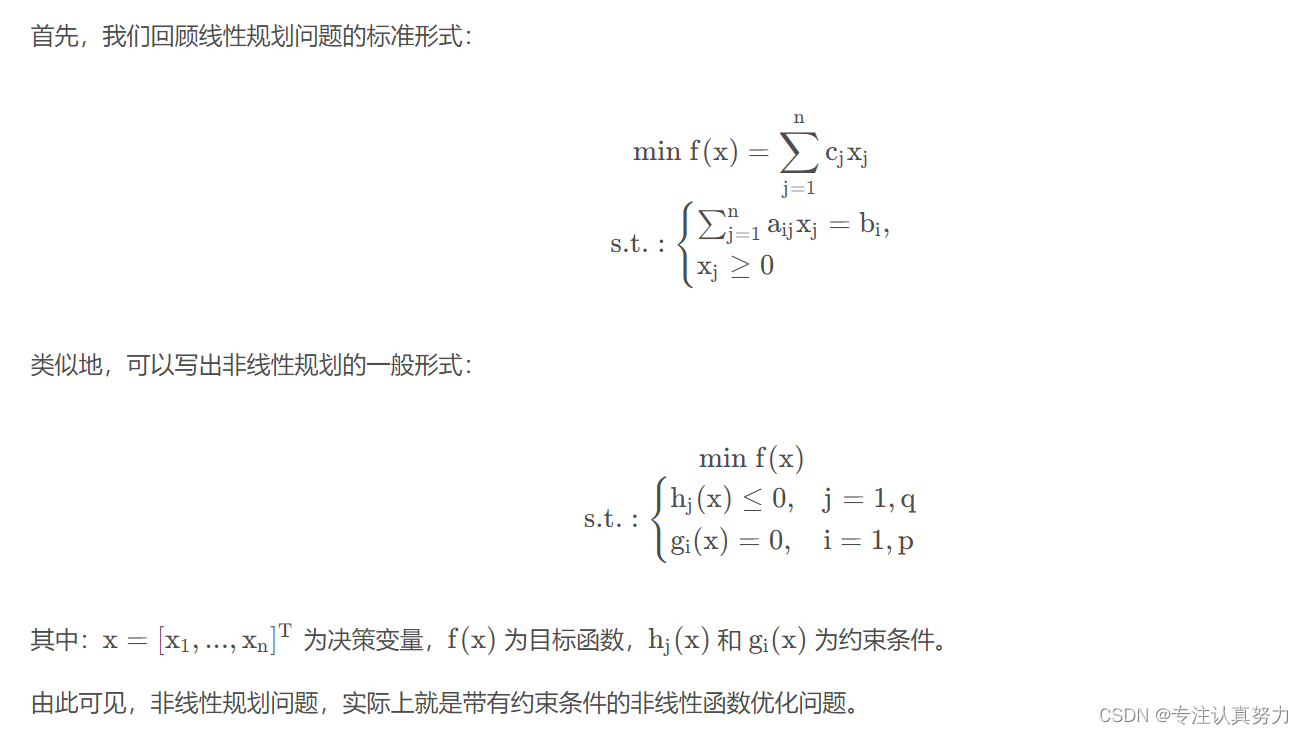
1.非线性规划问题的描述
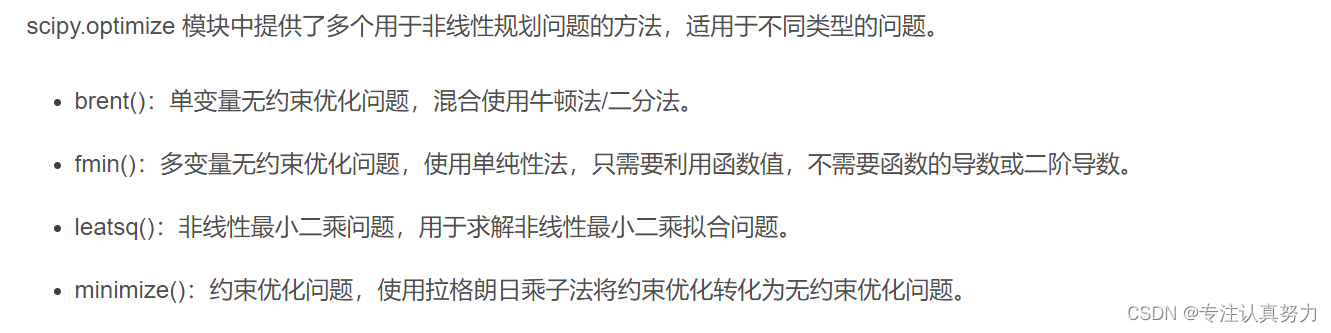
2.scipy.optimize.brent() 求解单变量无约束优化问题
非线性规划最简单的形式是一维搜索,一维搜索的常用方法是函数逼近法和区间收缩法。
brent() 函数是 SciPy.optimize 模块中求解单变量无约束优化问题最小值的首选方法。这是牛顿法和二分法的混合方法,既能保证稳定性又能快速收敛。

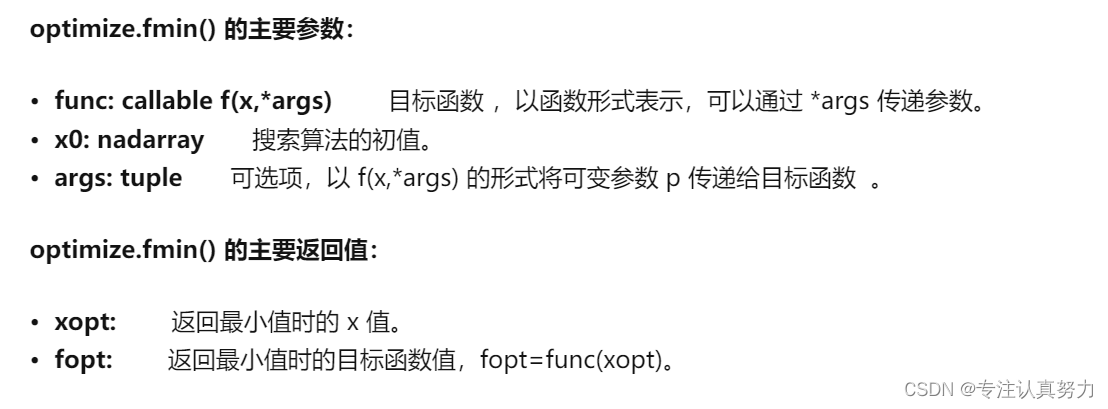
optimize.brent() 的主要参数:
func: callable f(x,args) 目标函数 f ( x ) f(x)f(x),以函数形式表示,可以通过 *args 传递参数
args: tuple 可选项,以 f(x,*args) 的形式将可变参数 p 传递给目标函数 f ( x , p ) f(x,p)f(x,p) 。
brack: tuple 可选项,搜索算法的开始区间(不是指 x 的上下限)
optimize.brent() 的主要返回值:
xmin: 返回函数达到最小值时的 x(注意是局部最优,不一定是全局最优)。
fval: 返回函数的最优值(默认不返回,仅当 full_output 为 1 时返回)。
optimize.brent() 的使用例程:
import numpy as np
from scipy.optimize import brent
import matplotlib.pyplot as plt
# 1. Demo1:单变量无约束优化问题(Scipy.optimize.brent)
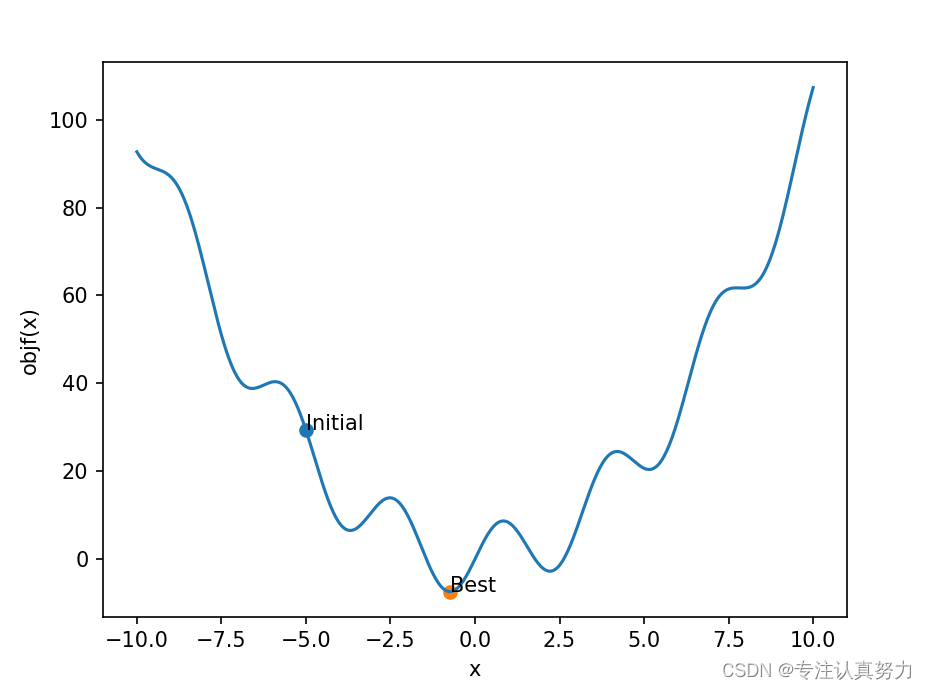
def objf(x): # 目标函数
fx = x ** 2 - 8 * np.sin(2 * x + np.pi)
return fx
xIni = -5.0
xOpt = brent(objf, brack=(xIni, 2))
print("xIni={:.4f}\tfxIni={:.4f}".format(xIni, objf(xIni)))
print("xOpt={:.4f}\tfxOpt={:.4f}".format(xOpt, objf(xOpt)))
x = np.linspace(-10, 10, 500)
plt.plot(x, objf(x))
plt.xlabel("x")
plt.ylabel("objf(x)")
plt.text(xIni, objf(xIni), "Initial")
plt.text(xOpt, objf(xOpt), "Best")
plt.scatter(xIni, objf(xIni))
plt.scatter(xOpt, objf(xOpt))
plt.show()
运行结果:

3.scipy.optimize.fmin() 求解多变量无约束优化问题
fmin() 函数是 SciPy.optimize 模块中求解多变量无约束优化问题(最小值)的首选方法,采用下山单纯性方法。下山单纯性方法又称 Nelder-Mead 法,只使用目标函数值,不需要导数或二阶导数值,是最重要的多维无约束优化问题数值方法之一。

from scipy.optimize import brent, fmin, minimize
import numpy as np
# 2. Demo2:多变量无约束优化问题(Scipy.optimize.brent)
# Rosenbrock 测试函数
def objf2(x): # Rosenbrock benchmark function
fx = sum(100.0 * (x[1:] - x[:-1] ** 2.0) ** 2.0 + (1 - x[:-1]) ** 2.0)
return fx
xIni = np.array([-2, -2])
xOpt = fmin(objf2, xIni)
print("xIni={:.4f},{:.4f}\tfxIni={:.4f}".format(xIni[0],xIni[1],objf2(xIni)))
print("xOpt={:.4f},{:.4f}\tfxOpt={:.4f}".format(xOpt[0],xOpt[1],objf2(xOpt)))

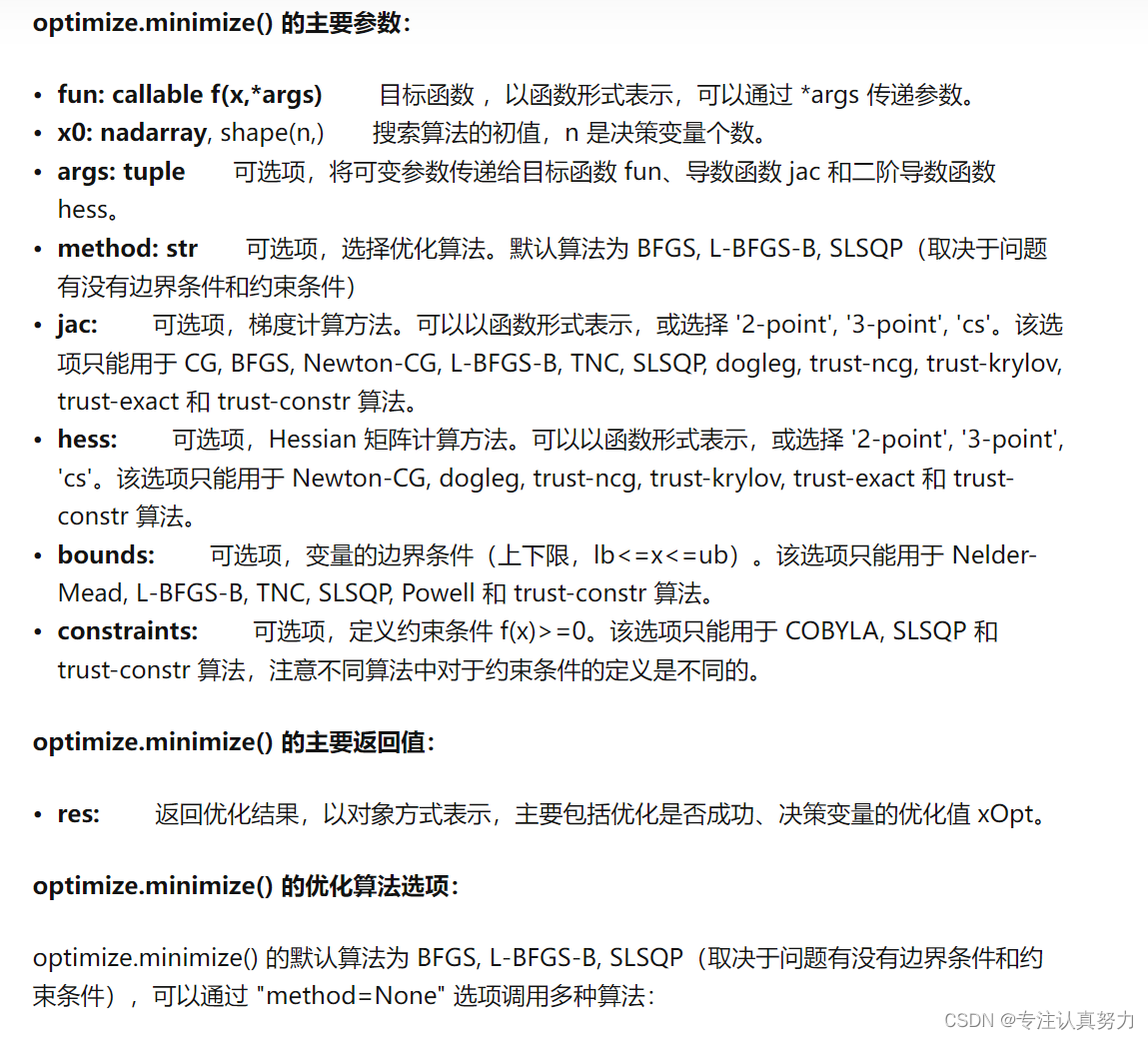
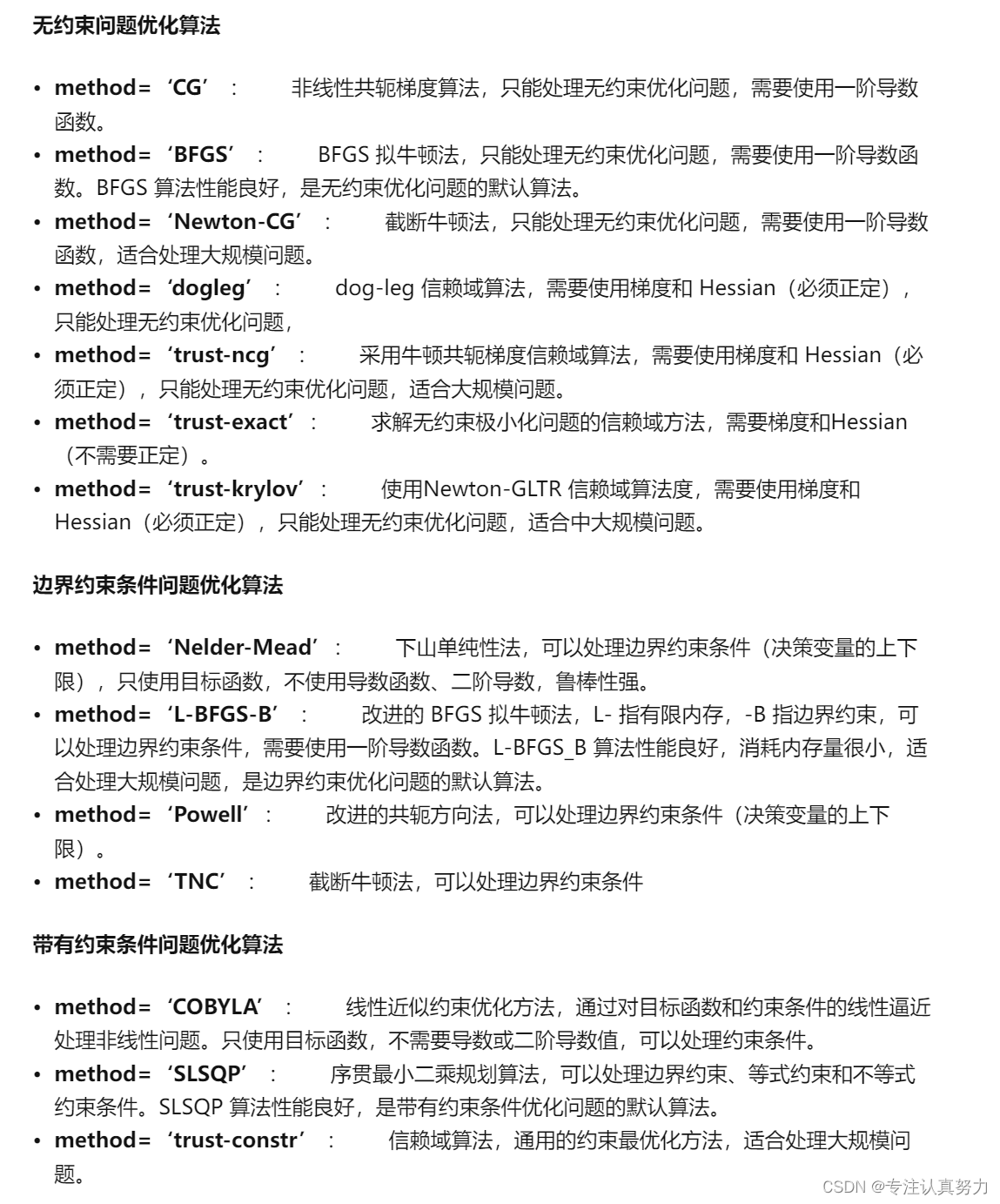
4.scipy.optimize.minimize() 求解非线性规划问题
minimize() 函数是 SciPy.optimize 模块中求解多变量优化问题的通用方法,可以调用多种算法,支持约束优化和无约束优化。

import numpy as np
from scipy.optimize import minimize
# 定义目标函数
def objf3(x): # Rosenbrock 测试函数
fx = sum(100.0 * (x[1:] - x[:-1] ** 2.0) ** 2.0 + (1 - x[:-1]) ** 2.0)
return fx
# 定义边界约束(优化变量的上下限)
b0 = (0.0, None) # 0.0 <= x[0] <= Inf
b1 = (0.0, 10.0) # 0.0 <= x[1] <= 10.0
b2 = (-5.0, 100.) # -5.0 <= x[2] <= 100.0
bnds = (b0, b1, b2) # 边界约束
# 优化计算
xIni = np.array([1., 2., 3.])
resRosen = minimize(objf3, xIni, method='SLSQP', bounds=bnds)
xOpt = resRosen.x
print("xOpt = {:.4f}, {:.4f}, {:.4f}".format(xOpt[0], xOpt[1], xOpt[2]))
print("min f(x) = {:.4f}".format(objf3(xOpt)))

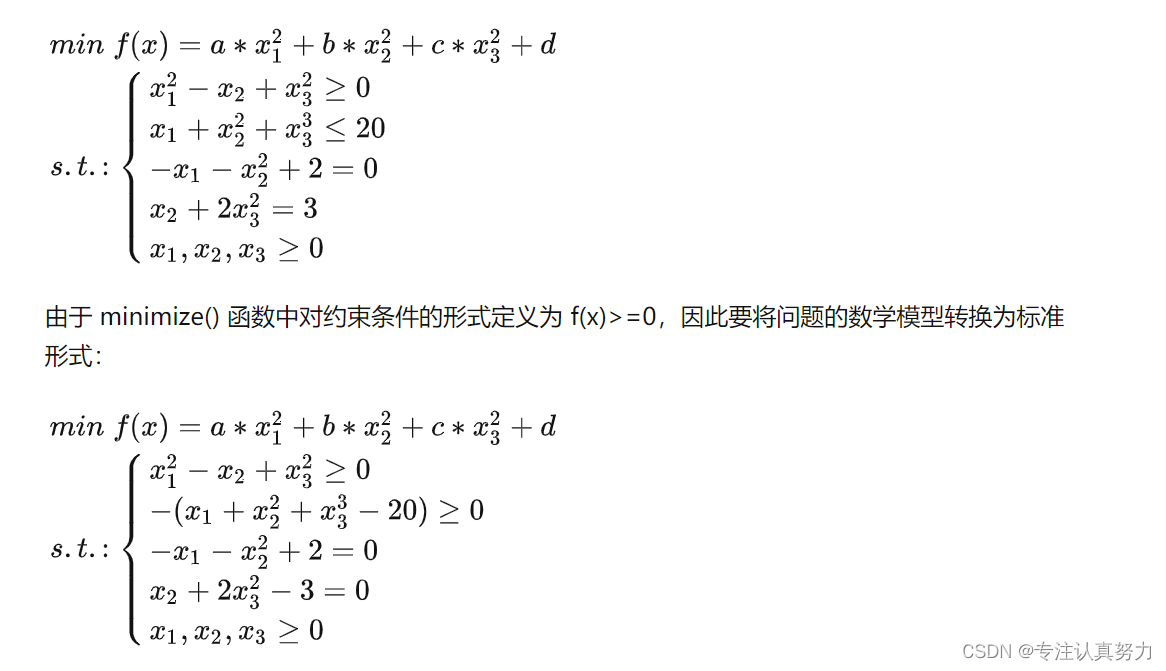
5.约束非线性规划问题实例
import numpy as np
from scipy.optimize import minimize
def objF4(x): # 定义目标函数
a, b, c, d = 1, 2, 3, 8
fx = a * x[0] ** 2 + b * x[1] ** 2 + c * x[2] ** 2 + d
return fx
# 定义约束条件函数
def constraint1(x): # 不等式约束 f(x)>=0
return x[0] ** 2 - x[1] + x[2] ** 2
def constraint2(x): # 不等式约束 转换为标准形式
return -(x[0] + x[1] ** 2 + x[2] ** 3 - 20)
def constraint3(x): # 等式约束
return -x[0] - x[1] ** 2 + 2
def constraint4(x): # 等式约束
return x[1] + 2 * x[2] ** 2 - 3
# 定义边界约束
b = (0.0, None)
bnds = (b, b, b)
# 定义约束条件
con1 = {'type': 'ineq', 'fun': constraint1}
con2 = {'type': 'ineq', 'fun': constraint2}
con3 = {'type': 'eq', 'fun': constraint3}
con4 = {'type': 'eq', 'fun': constraint4}
cons = ([con1, con2, con3, con4]) # 3个约束条件
# 求解优化问题
x0 = np.array([1., 2., 3.]) # 定义搜索的初值
res = minimize(objF4, x0, method='SLSQP', bounds=bnds, constraints=cons)
print("Optimization problem (res):\t{}".format(res.message)) # 优化是否成功
print("xOpt = {}".format(res.x)) # 自变量的优化值
print("min f(x) = {:.4f}".format(res.fun)) # 目标函数的优化值
