(pytorch进阶之路)扩散概率模型
文章目录
- 概述
- 前置知识
- diffusion图示
- 扩散过程
- 逆扩散过程
- 后验的扩散条件概率
- 似然函数
- 算法
- 代码实现
概述
扩散概率模型
《deep unsupervised learning using nonequilibrium thermodynamics》
https://arxiv.org/pdf/1503.03585.pdf
《denoising diffusion probabilistic models》
2020年
https://arxiv.org/pdf/2006.11239.pdf
类似VAE GAN是一个生成式模型
生成模型一共五类,
seq2seq自回归的解码
GAN,通过判别器迭代优化生成器
Flow,数学严谨可逆过程,设计巧妙的结构
VAE,
Diffusion model,
前置知识
条件概率公式,比较简单可以见贝叶斯公式
P(ABC) = P(C|BA) P(BA) = P(C|BA) P(B|A) P(A)
P(BC|A) = P(B|A) P(C|AB) (两边同乘P(A)推导)
基于马尔可夫链的条件概率
A->B->C,当前选择只受到前一次的结果以及对应转移概率的影响,与在之前的选择无关
无记忆性 P(St| St-1 St-2 …) = P(St|St-1)
P(ABC) = P(C|BA)(BA) = P(C|B) P(B|A) P(A)
P(BC|A) = P(B|A) P(C|B)
高斯分布的KL散度公式
KL散度 = ( - 信息熵)+(交叉熵)
KL散度(距离)一般被用于计算两个分布之间的不同,KL距离并不是对称的
对于两个单一变量的高斯分布p和q而言,它们的KL散度为

信息量:指一个时间所能带来的信息的多少,一般地这个事件发生概率越小,所能带来的信息量越大
I = -log2(p(x))
信息熵:一个概率分布p的平均信息量,代表着随机变量或系统的不确定性,熵越大,随机变量或系统的不确定性就越大
H§ = -∑p(x)·log2(p(x))
交叉熵
H(A,B) = - ∑ Pa(xi) [log Pb(xi)]
参数重整化
若希望从高斯分布N(μ,σ2)中采样,可以先从标准分布N(0,1) 采样出z, 再得到 σ×z+μ,如果我们直接采样N(μ,σ2),假设μ和σ是通过神经网络预测出来的,导致μ和σ和采样出来的结果断开了,梯度无法传导了,因为采样过程是不可导的,为了仍然是梯度可更新的,从标准分布中采样出z,经过缩放和平移得到采样值,z可以看作是网络输入或者是常数,那么采样值μ和σ就是完全可导的
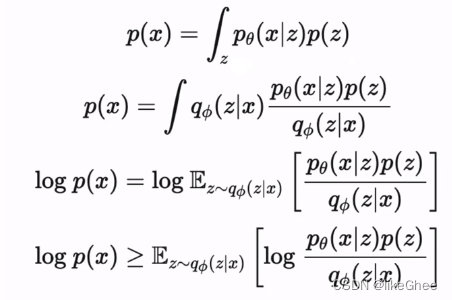
VAE,我们认为x是由某个隐变量z生成的,z通过后验网络输入x生成,在推理的时候从z预测x
公式:首先是p(x)公式,接着公式两边同时乘以后验网络qΦ(z|x),已知x去预测z,两边取log,右边写成期望值形式,最后通过jensen不等式,将log移到期望值里面,得到最后的目标数据分布的下界,最大化下界则转为最大化期望值的式子,
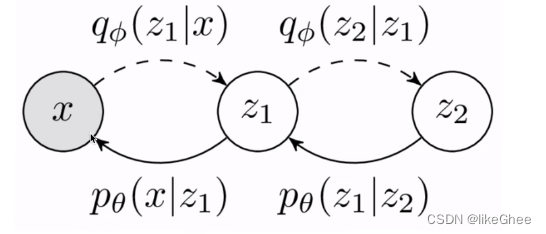
多层VAE,z2生成z1,z1生成x,那么px就可以写成联合概率分布,对z1和z2分别积分,同样的分子分母同乘一个qΦ,再写成期望的形式
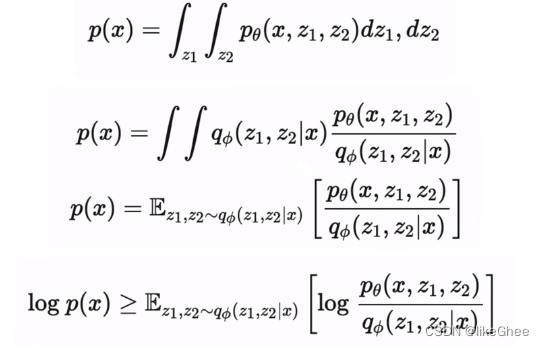
使用马尔科夫链的条件概率,带入,写成最后的对数似然的下界,这就是多层VAE的下界
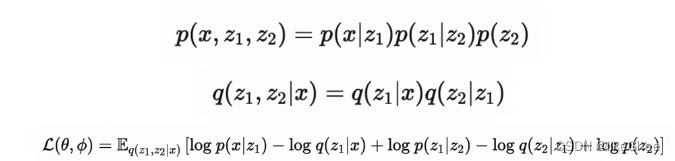
这个过程和Diffuision model很类似,diffusion也是从目标分布中x0加噪逐渐生成一个最终的分布xT,推理从xT得到x0,diffusion和vae的目标函数十分相似
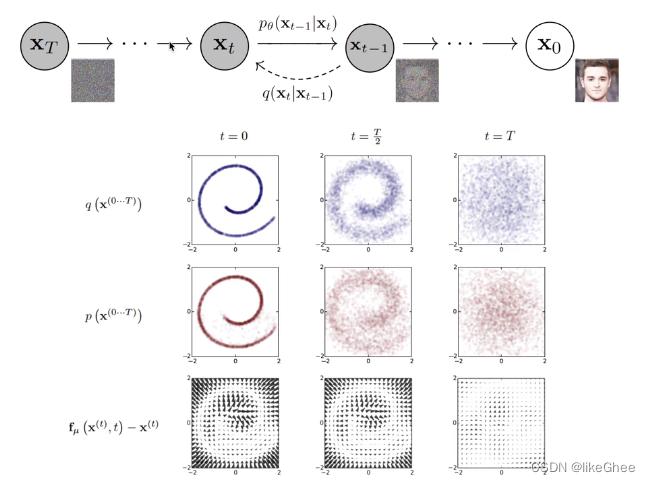
diffusion图示
两个过程,有序变到无序过程称为扩散过程, 逆扩散过程则是从噪声分布逐步预测出目标的分布
第三行可以看作reverse过程中每个像素点的位置相比最右边高斯分布时候的偏移量
扩散过程
给定初始数据分布x0~q(x),可以不断地向分布中添加高斯噪声(不含参的,是确定值的),该噪声的标准差以固定值βt而确定的,均值是以固定值βt和当前时刻t的数据xt决定的,这个过程是一个马尔科夫链过程
随着t的不断增大,最终数据分布xT变成了一个各向独立的高斯分布
xt-1去预测xt是一个高斯分布,并且均值和方差由β和当前时刻的x确定
q(xt|xt-1) = N(xt; 根号下1-βt × xt-1, βt·I)
I是单位矩阵

那么联合概率为
任何时刻的q(xt)可以直接基于x0和βt计算出来,而不需要迭代
用参数重整化可以推导:
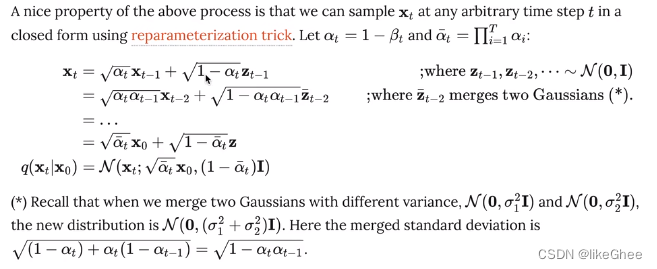
最终q(xt|x0)变为了各向同性的高斯分布,就可以算出α-t在任意时候符合一个标准的分布了
βt越来越大,xT和x0是同一个维度的
逆扩散过程
从高斯分布中恢复原始模型
我们假设从xt逐步恢复到x0是一个高斯分布,并且逆扩散过程仍然是马尔科夫链过程
构建一个网络去估计,从xt预测xt-1 服从 N(xt-1;μθ(xt,t),Σθ(xt,t)),xt和t作为输入,含参的正太分布
则联合概率密度分布为

后验的扩散条件概率
后验的扩散条件概率q(xt-1|xt,x0)分布是可以用公式表达的,给定xt和x0是可以计算出xt-1的
高斯分布概率密度函数
注意公式:
根据贝叶斯公式推导:
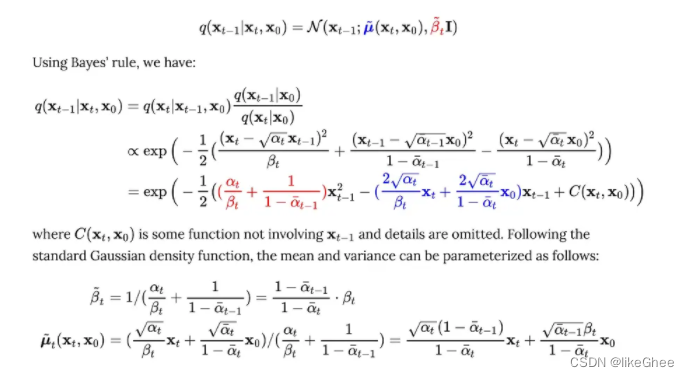
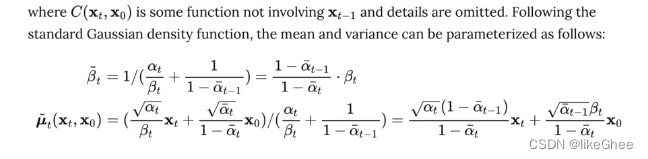
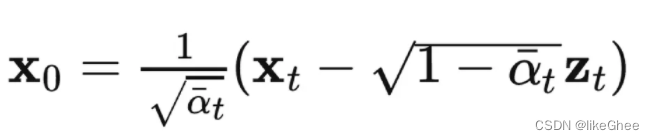
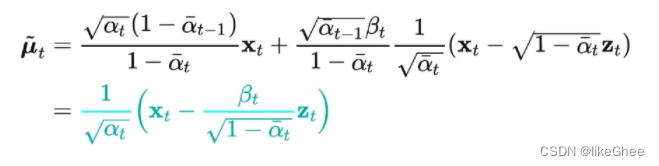
根据x0和xt之间的关系,将x0的表达式代入到q(xt-1|xt,x0)的分布中,可以重新给出该分布的均值表达式,这个时候表达式不再含有x0,并且多了噪声项,这为后面设计神经网络提供了基础,在x0的条件下,后验条件高斯分布的均值只与xt和zt有关,zt是t时刻的随机正态分布变量,源自参数重整化
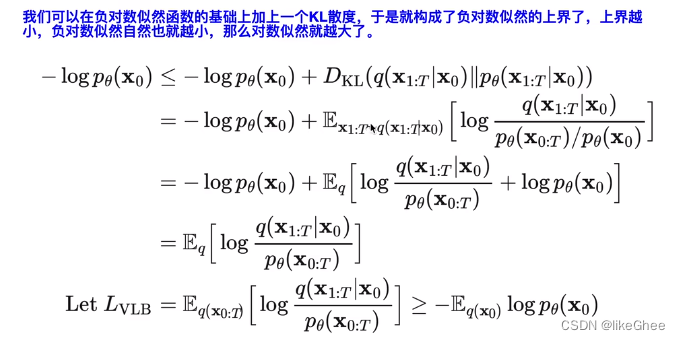
似然函数
负对数似然加上KL散度,KL散度对于等于0,获得上界,上界取最小,负对数似然小于最小值
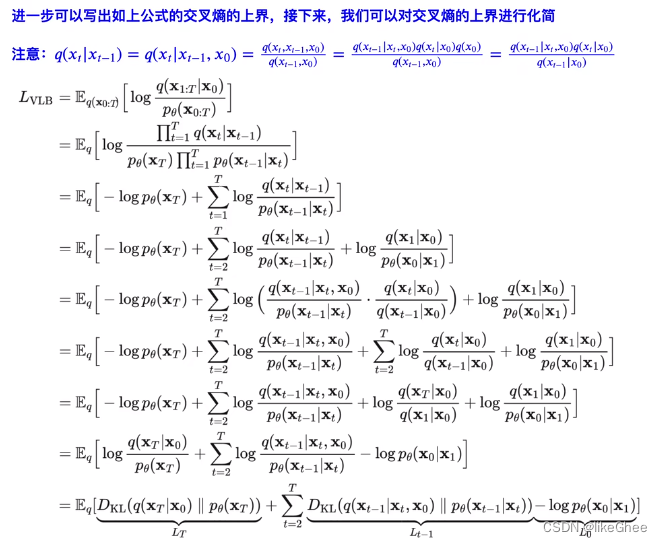
在上式中,L0在DDPM原论文中由于选择了固定方差,LT为常数,而L0相当于从连续空间到离散空间的解码loss,仿照VAE的做法,将连续的高斯分布转换成离散的分布
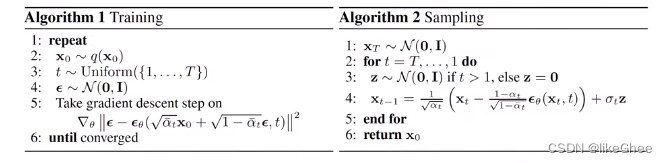
算法
训练:从q(x0)中采样数据,等价于从数据集中拿出一部分数据,同时随机地生成一个时刻t,再随机地生成一个正态分布的噪声epsilon(ε),将这些量带入目标函数中,进行最小化
εθ是一个网络,喂入x0,αt,t,从网络中随机生成一个ε噪声,网络算出一个新的和x0一样维度的东西,再和网络中生成的ε做差
关于预测,其实可以预测x0,也可以预测噪音,也可以预测期望值。DDPM中选择了预测噪音,所以重参数化那里就选择了将噪音作为含参网络的预测目标。
右边是采样:一旦优化好了εθ网络,完全可以从xt推出xt-1,xt-2,…,x0,从t到1迭代,生成z的目的是为了采样,正态分布中采样一个z,乘以方差加上均值,得到当前的分布的采样值xt-1,t次采样后得到x0
代码实现
选择一个数据集,用sklearn的s_curve,将散点图画出来就是一个S,通过make_s_curve函数生成一万个点,每个点只取第0维和第2维,s_curve的形状是[10000, 2], 把它构建成一个张量,变成float类型,作为训练集
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
from sklearn.datasets import make_s_curve
import torch
s_curve,_ = make_s_curve(10**4,noise=0.1)
s_curve = s_curve[:,[0,2]]/10.0
print("shape of s:",np.shape(s_curve))
data = s_curve.T
fig,ax = plt.subplots()
ax.scatter(*data,color='blue',edgecolor='white');
ax.axis('off')
dataset = torch.Tensor(s_curve).float()
确定超参数的值,步骤设为100,确定每一步的β值,sigmoid函数递增
α等于1-β
α_prod是把整个α连乘
α_prod_previous只取α_prod的第一项开始,第0项设为1
α_bar_sqrt是α_prod的开根号
一减去α bar log,还有一减去α bar sqrt等等
形状大小都是一样的[100],这些值是超参数,不需要训练的
num_steps = 100
#制定每一步的beta
betas = torch.linspace(-6,6,num_steps)
betas = torch.sigmoid(betas)*(0.5e-2 - 1e-5)+1e-5
#计算alpha、alpha_prod、alpha_prod_previous、alpha_bar_sqrt等变量的值
alphas = 1-betas
alphas_prod = torch.cumprod(alphas,0)
alphas_prod_p = torch.cat([torch.tensor([1]).float(),alphas_prod[:-1]],0)
alphas_bar_sqrt = torch.sqrt(alphas_prod)
one_minus_alphas_bar_log = torch.log(1 - alphas_prod)
one_minus_alphas_bar_sqrt = torch.sqrt(1 - alphas_prod)
assert alphas.shape==alphas_prod.shape==alphas_prod_p.shape==\
alphas_bar_sqrt.shape==one_minus_alphas_bar_log.shape\
==one_minus_alphas_bar_sqrt.shape
print("all the same shape",betas.shape)
确定扩散过程任意时刻的采样值
计算q(xt|x0)公式,给定初始的训练数据分布,算出任意时刻xt的采样值
公式只和x0和t有关,首先生成正态分布的随机 噪声noise,得到均值和方差,使用重整化技巧,噪声乘以标准差alphas_1_m_t,加上一个均值alphas_t * x_0
#计算任意时刻的x采样值,基于x_0和重参数化
def q_x(x_0,t):
"""可以基于x[0]得到任意时刻t的x[t]"""
noise = torch.randn_like(x_0)
alphas_t = alphas_bar_sqrt[t]
alphas_1_m_t = one_minus_alphas_bar_sqrt[t]
return (alphas_t * x_0 + alphas_1_m_t * noise)#在x[0]的基础上添加噪声
演示原始数据加噪100步,每间隔5步画出共20张图,遍历循环,传入一个时刻t,传入qx函数中算出x5的值,将图片画出来
num_shows = 20
fig,axs = plt.subplots(2,10,figsize=(28,3))
plt.rc('text',color='black')
#共有10000个点,每个点包含两个坐标
#生成100步以内每隔5步加噪声后的图像
for i in range(num_shows):
j = i//10
k = i%10
q_i = q_x(dataset,torch.tensor([i*num_steps//num_shows]))#生成t时刻的采样数据
axs[j,k].scatter(q_i[:,0],q_i[:,1],color='red',edgecolor='white')
axs[j,k].set_axis_off()
axs[j,k].set_title('$q(\mathbf{x}_{'+str(i*num_steps//num_shows)+'})$')
编写拟合逆扩散过程高斯分布的模型
模型对应εθ网络
输入的t经过embedding层,将x输入linear层和relu,输出的结果加上t_embedding,再送入relu层,每一层的embedding都是新的一个可学习的embbedding,最后输出x
十分简单的网络,完全由MLP和Relu构成
import torch
import torch.nn as nn
class MLPDiffusion(nn.Module):
def __init__(self,n_steps,num_units=128):
super(MLPDiffusion,self).__init__()
self.linears = nn.ModuleList(
[
nn.Linear(2,num_units),
nn.ReLU(),
nn.Linear(num_units,num_units),
nn.ReLU(),
nn.Linear(num_units,num_units),
nn.ReLU(),
nn.Linear(num_units,2),
]
)
self.step_embeddings = nn.ModuleList(
[
nn.Embedding(n_steps,num_units),
nn.Embedding(n_steps,num_units),
nn.Embedding(n_steps,num_units),
]
)
def forward(self,x,t):
# x = x_0
for idx,embedding_layer in enumerate(self.step_embeddings):
t_embedding = embedding_layer(t)
x = self.linears[2*idx](x)
x += t_embedding
x = self.linears[2*idx+1](x)
x = self.linears[-1](x)
return x
编写训练误差函数
最简单的就是ε-εθ的MSE
对batchsize样本随机生成时刻t,t随机分散,先生成一半,另一半的t=n_steps-1-t,起到t尽量不重复的效果
t的形状[batchsize,1],将1维度压缩掉,unsqueeze,方便我们取系数
生成噪声ε,根据均值和标准差缩放平移成model输入x,再将t输入得到输出
和噪声ε做MSE得到loss
def diffusion_loss_fn(model,x_0,alphas_bar_sqrt,one_minus_alphas_bar_sqrt,n_steps):
"""对任意时刻t进行采样计算loss"""
batch_size = x_0.shape[0]
#对一个batchsize样本生成随机的时刻t
t = torch.randint(0,n_steps,size=(batch_size//2,))
t = torch.cat([t,n_steps-1-t],dim=0)
t = t.unsqueeze(-1)
#x0的系数
a = alphas_bar_sqrt[t]
#eps的系数
aml = one_minus_alphas_bar_sqrt[t]
#生成随机噪音eps
e = torch.randn_like(x_0)
#构造模型的输入
x = x_0*a+e*aml
#送入模型,得到t时刻的随机噪声预测值
output = model(x,t.squeeze(-1))
#与真实噪声一起计算误差,求平均值
return (e - output).square().mean()
逆扩散采样
p sample loop从xt中恢复 xt-1,xt-2,…, x0
p sample就是一个参数重整化的过程,根据μθ公式得到均值,方差是βt的开方
在生成正态分布的随机量z,z乘上方差加上均值得到sample
def p_sample_loop(model,shape,n_steps,betas,one_minus_alphas_bar_sqrt):
"""从x[T]恢复x[T-1]、x[T-2]|...x[0]"""
cur_x = torch.randn(shape)
x_seq = [cur_x]
for i in reversed(range(n_steps)):
cur_x = p_sample(model,cur_x,i,betas,one_minus_alphas_bar_sqrt)
x_seq.append(cur_x)
return x_seq
def p_sample(model,x,t,betas,one_minus_alphas_bar_sqrt):
"""从x[T]采样t时刻的重构值"""
t = torch.tensor([t])
coeff = betas[t] / one_minus_alphas_bar_sqrt[t]
eps_theta = model(x,t)
mean = (1/(1-betas[t]).sqrt())*(x-(coeff*eps_theta))
z = torch.randn_like(x)
sigma_t = betas[t].sqrt()
sample = mean + sigma_t * z
return (sample)
编写训练代码
构造dataloader
遍历epoch次,遍历dataloader数据集
计算loss
送入optimizer进行优化
print('Training model...')
batch_size = 128
dataloader = torch.utils.data.DataLoader(dataset,batch_size=batch_size,shuffle=True)
num_epoch = 4000
plt.rc('text',color='blue')
model = MLPDiffusion(num_steps)#输出维度是2,输入是x和step
optimizer = torch.optim.Adam(model.parameters(),lr=1e-3)
for t in range(num_epoch):
for idx,batch_x in enumerate(dataloader):
loss = diffusion_loss_fn(model,batch_x,alphas_bar_sqrt,one_minus_alphas_bar_sqrt,num_steps)
optimizer.zero_grad()
loss.backward()
torch.nn.utils.clip_grad_norm_(model.parameters(),1.)
optimizer.step()
if(t%100==0):
print(loss)
x_seq = p_sample_loop(model,dataset.shape,num_steps,betas,one_minus_alphas_bar_sqrt)
fig,axs = plt.subplots(1,10,figsize=(28,3))
for i in range(1,11):
cur_x = x_seq[i*10].detach()
axs[i-1].scatter(cur_x[:,0],cur_x[:,1],color='red',edgecolor='white');
axs[i-1].set_axis_off();
axs[i-1].set_title('$q(\mathbf{x}_{'+str(i*10)+'})$')