【无人机】四旋翼飞行器控制、路径规划和轨迹优化(Matlab代码实现)
💥💥💥💞💞💞欢迎来到本博客❤️❤️❤️💥💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十
目录
💥1 概述
📚2 运行结果
📃2.1 情景1
📃2.2 情景2
👨💻3 参考文献
🎉4 Matlab代码实现
💥1 概述
在过去七年中,材料、电子、传感器和电池的进步推动了微型无人飞行器(MAV)的发展,MAV的长度在0.1-0.5米到0.1-0.5千克之间。一些小组已经建立并分析了10cm范围内的MAV。其中最小的是Picoflyer,螺旋桨直径为60毫米,质量为3.3克。50 cm范围内的平台更为普遍,一些团体已经建造并飞行了这种尺寸的系统。事实上,在这种尺寸范围内有几种商用RC直升机和研究级直升机。介绍了自主微型无人机开发面临的挑战。在本项目中,我们介绍了GRASP多用途微型飞行器试验台中使用的四旋翼建模,以支持微型飞行器协调动态飞行的研究。,其中描述了现成四转子的建模、控制和集成方法。详细文章讲解见第四部分。
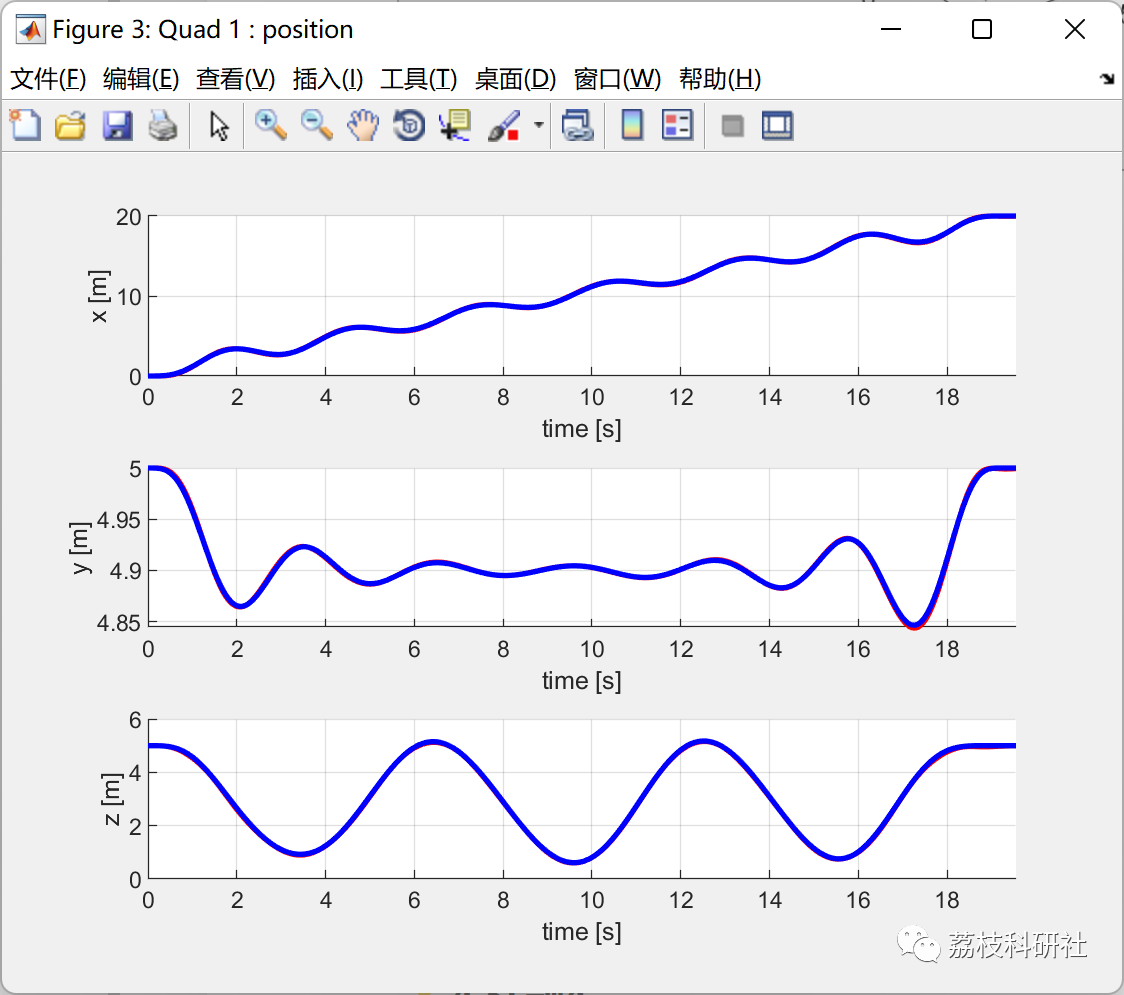
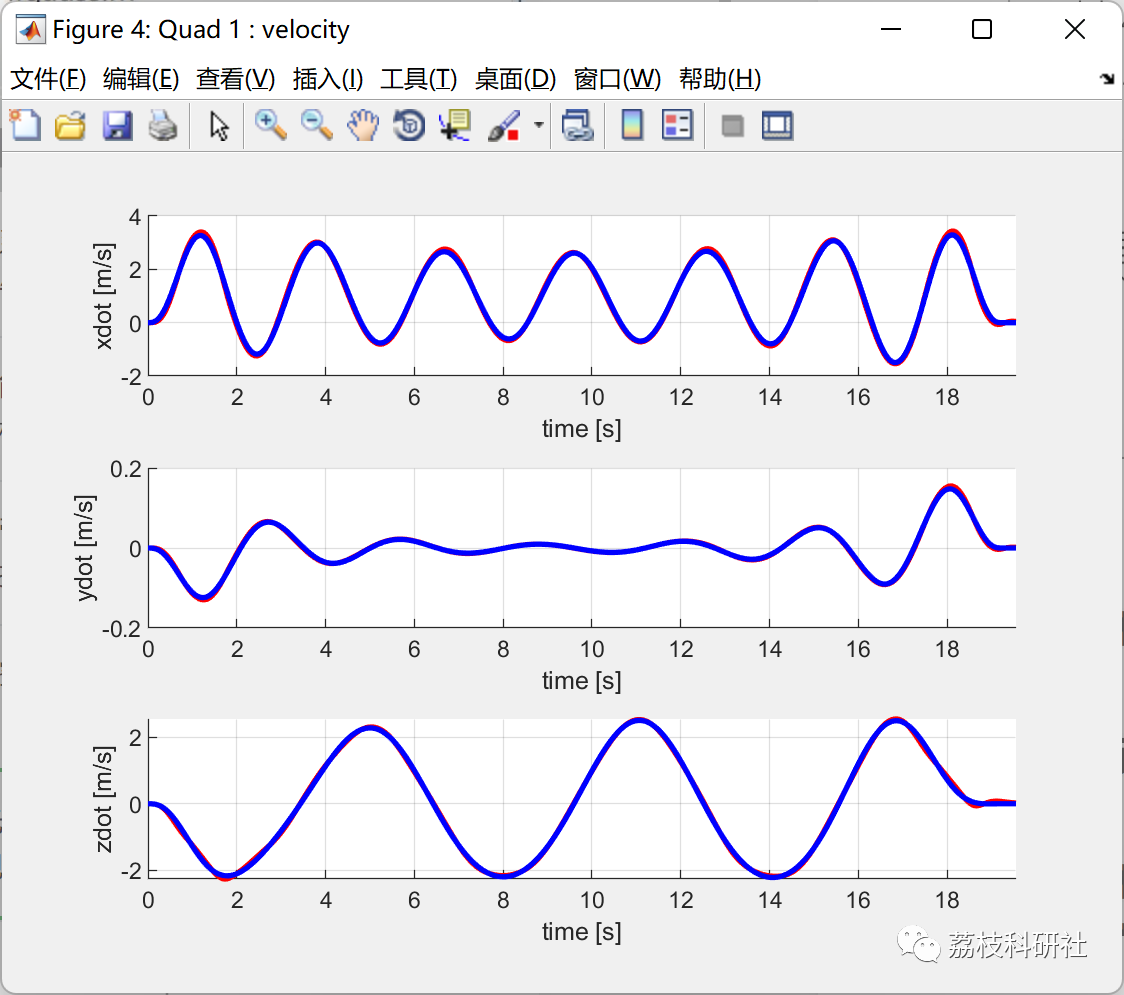
📚2 运行结果
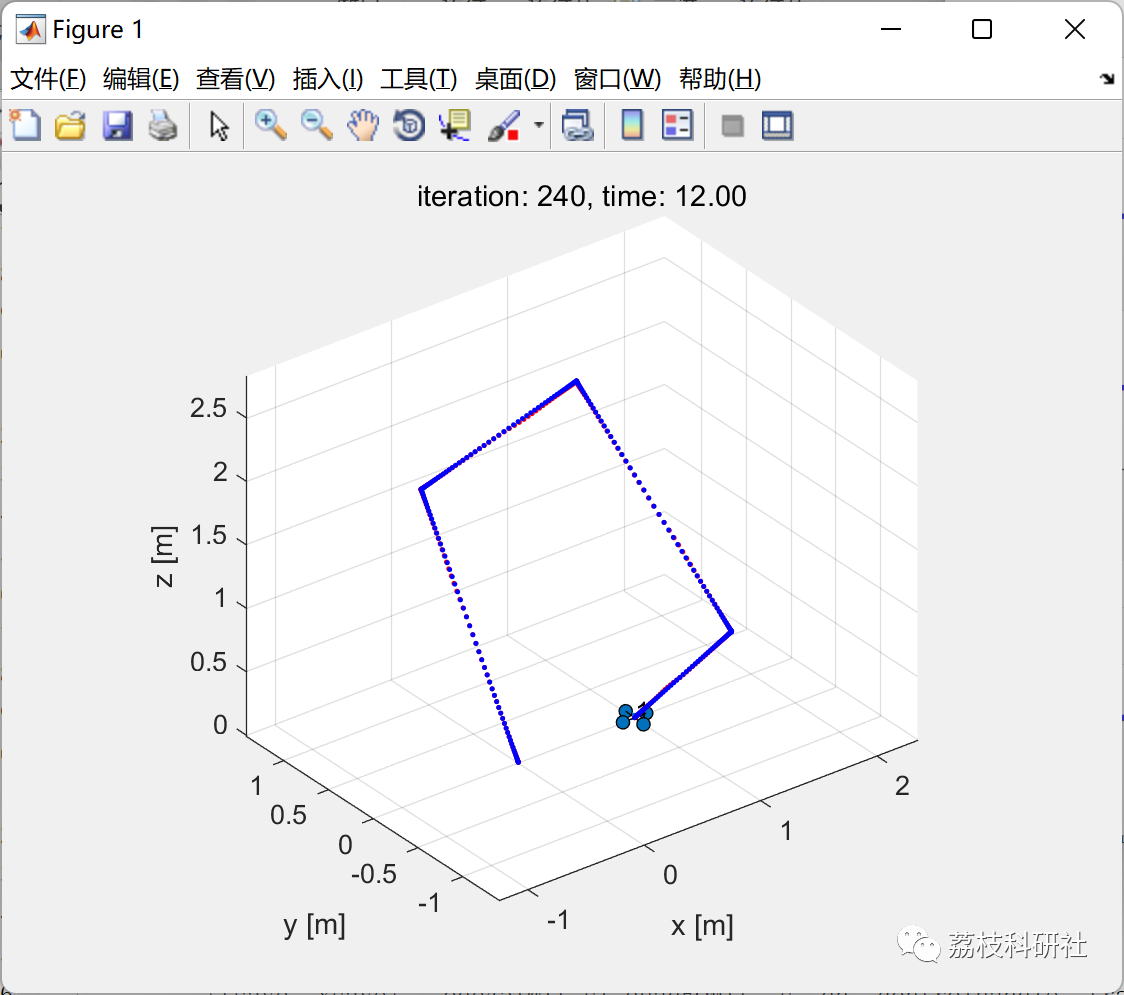
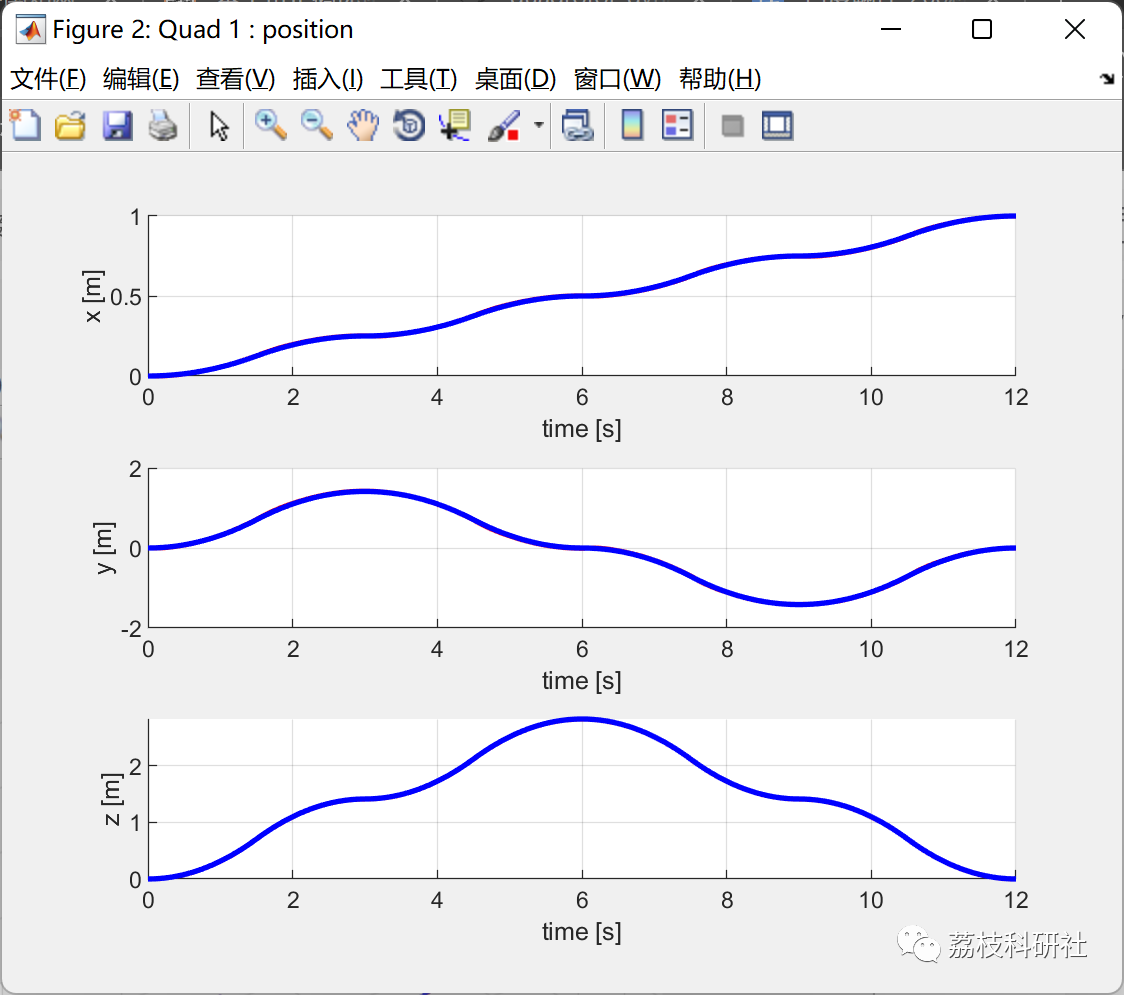
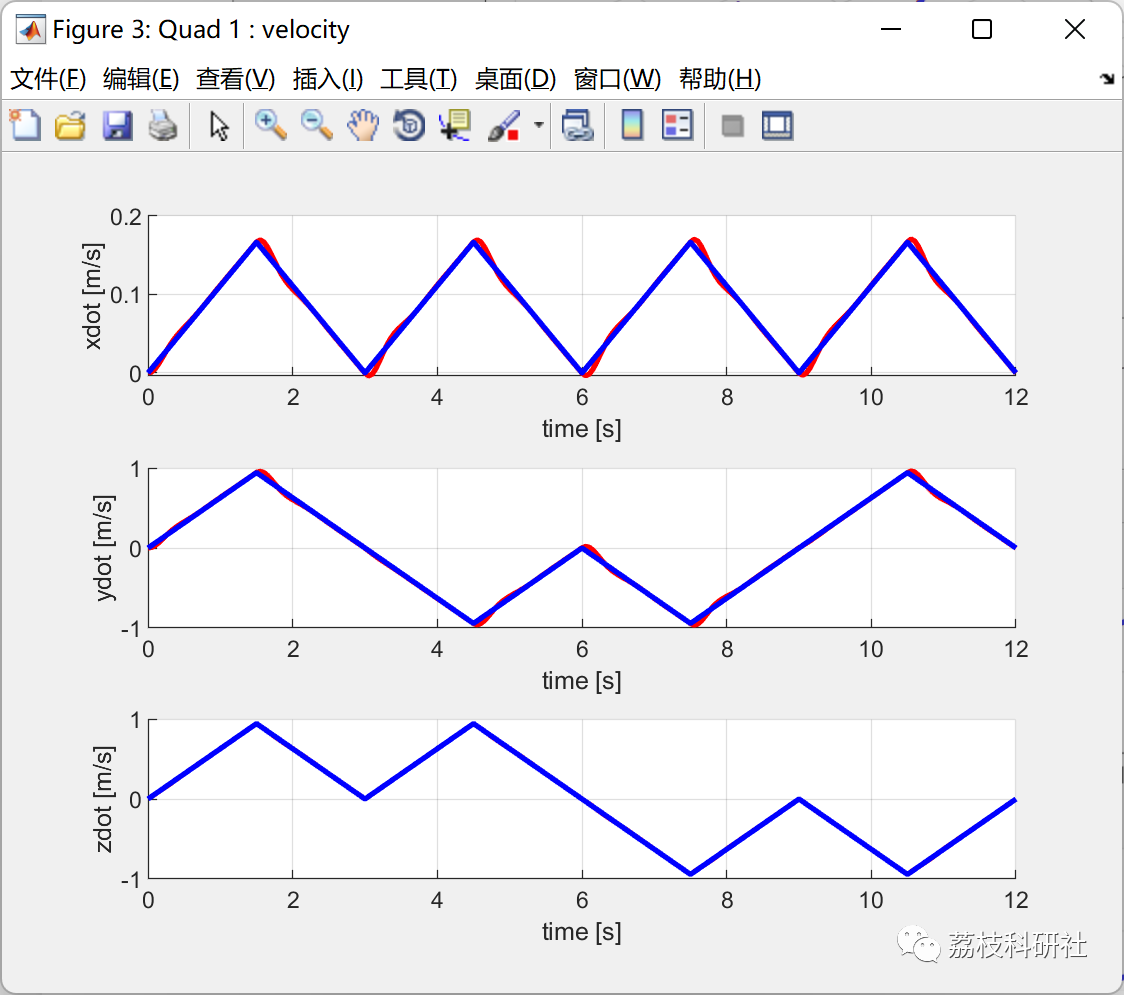
📃2.1 情景1
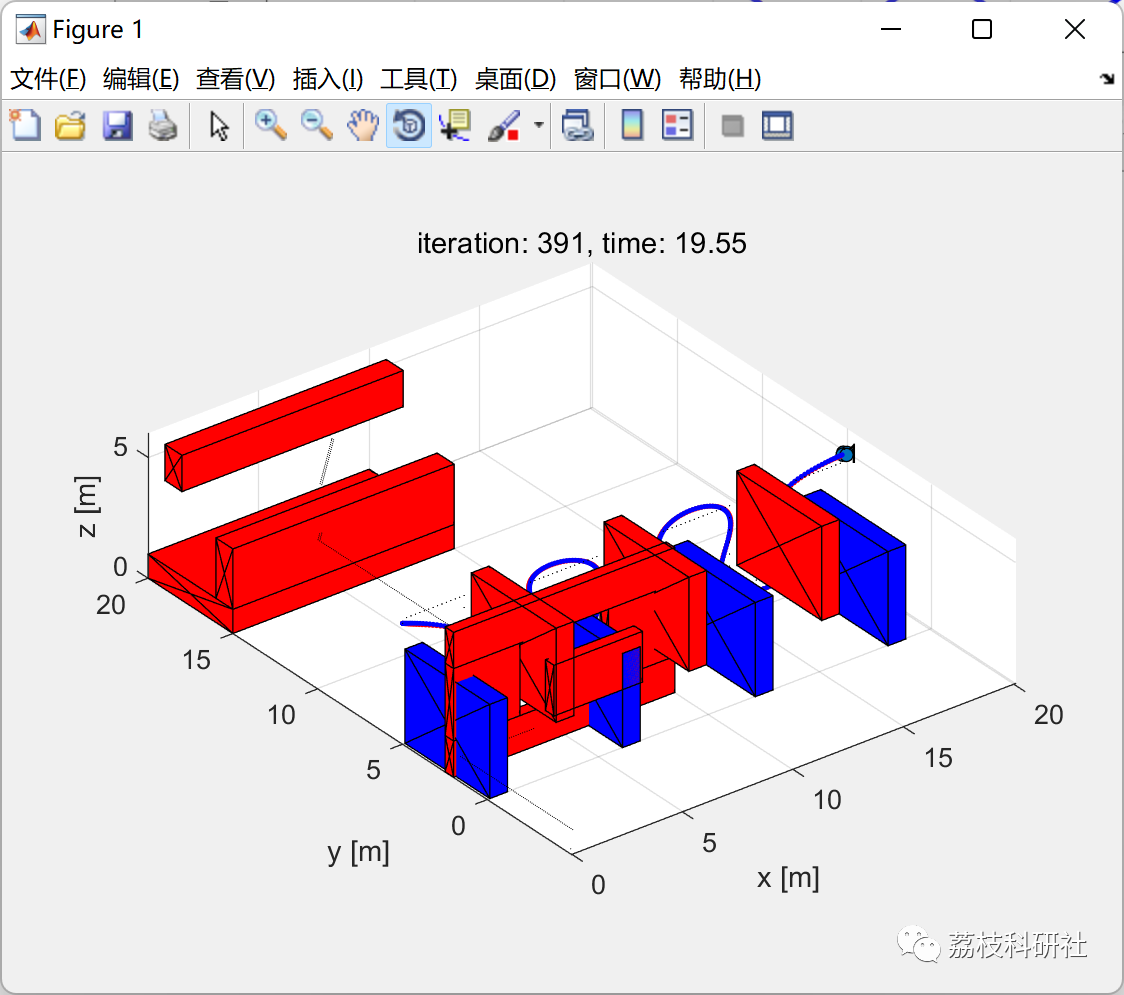
📃2.2 情景2
部分代码:
function sdot = quadEOM_readonly(t, s, F, M, params)
% QUADEOM_READONLY Solve quadrotor equation of motion
% quadEOM_readonly calculate the derivative of the state vector
%
% INPUTS:
% t - 1 x 1, time
% s - 13 x 1, state vector = [x, y, z, xd, yd, zd, qw, qx, qy, qz, p, q, r]
% F - 1 x 1, thrust output from controller (only used in simulation)
% M - 3 x 1, moments output from controller (only used in simulation)
% params - struct, output from crazyflie() and whatever parameters you want to pass in
%
% OUTPUTS:
% sdot - 13 x 1, derivative of state vector s
%
% NOTE: You should not modify this function
% See Also: quadEOM_readonly, crazyflie
%************ EQUATIONS OF MOTION ************************
% Limit the force and moments due to actuator limits
A = [0.25, 0, -0.5/params.arm_length;
0.25, 0.5/params.arm_length, 0;
0.25, 0, 0.5/params.arm_length;
0.25, -0.5/params.arm_length, 0];
prop_thrusts = A*[F;M(1:2)]; % Not using moment about Z-axis for limits
prop_thrusts_clamped = max(min(prop_thrusts, params.maxF/4), params.minF/4);
B = [ 1, 1, 1, 1;
0, params.arm_length, 0, -params.arm_length;
-params.arm_length, 0, params.arm_length, 0];
F = B(1,:)*prop_thrusts_clamped;
M = [B(2:3,:)*prop_thrusts_clamped; M(3)];
% Assign states
x = s(1);
y = s(2);
z = s(3);
xdot = s(4);
ydot = s(5);
zdot = s(6);
qW = s(7);
qX = s(8);
qY = s(9);
qZ = s(10);
p = s(11);
q = s(12);
r = s(13);
quat = [qW; qX; qY; qZ];
bRw = QuatToRot(quat);
wRb = bRw';
% Acceleration
accel = 1 / params.mass * (wRb * [0; 0; F] - [0; 0; params.mass * params.grav]);
% Angular velocity
K_quat = 2; %this enforces the magnitude 1 constraint for the quaternion
quaterror = 1 - (qW^2 + qX^2 + qY^2 + qZ^2);
qdot = -1/2*[0, -p, -q, -r;...
p, 0, -r, q;...
q, r, 0, -p;...
r, -q, p, 0] * quat + K_quat*quaterror * quat;
% Angular acceleration
omega = [p;q;r];
pqrdot = params.invI * (M - cross(omega, params.I*omega));
% Assemble sdot
sdot = zeros(13,1);
sdot(1) = xdot;
sdot(2) = ydot;
sdot(3) = zdot;
sdot(4) = accel(1);
sdot(5) = accel(2);
sdot(6) = accel(3);
sdot(7) = qdot(1);
sdot(8) = qdot(2);
sdot(9) = qdot(3);
sdot(10) = qdot(4);
sdot(11) = pqrdot(1);
sdot(12) = pqrdot(2);
sdot(13) = pqrdot(3);
end
👨💻3 参考文献
[1]谭凯元,朱嘉林,邓君,王荔蔷,杨家源.基于双目视觉的SLAM四旋翼无人机[J].机电工程技术,2022,51(09):83-87+141.
[2]李帅,张杰,杜立杰,李盼.工程测量中无人机航测技术的应用[J].黑龙江科学,2022,13(16):56-58.