[AutoSAR系列] 1.3 AutoSar 架构
依AutoSAR及经验辛苦整理,原创保护,禁止转载。
专栏 《深入浅出AutoSAR》
1. 整体架构
图片来源: AutoSar 官网
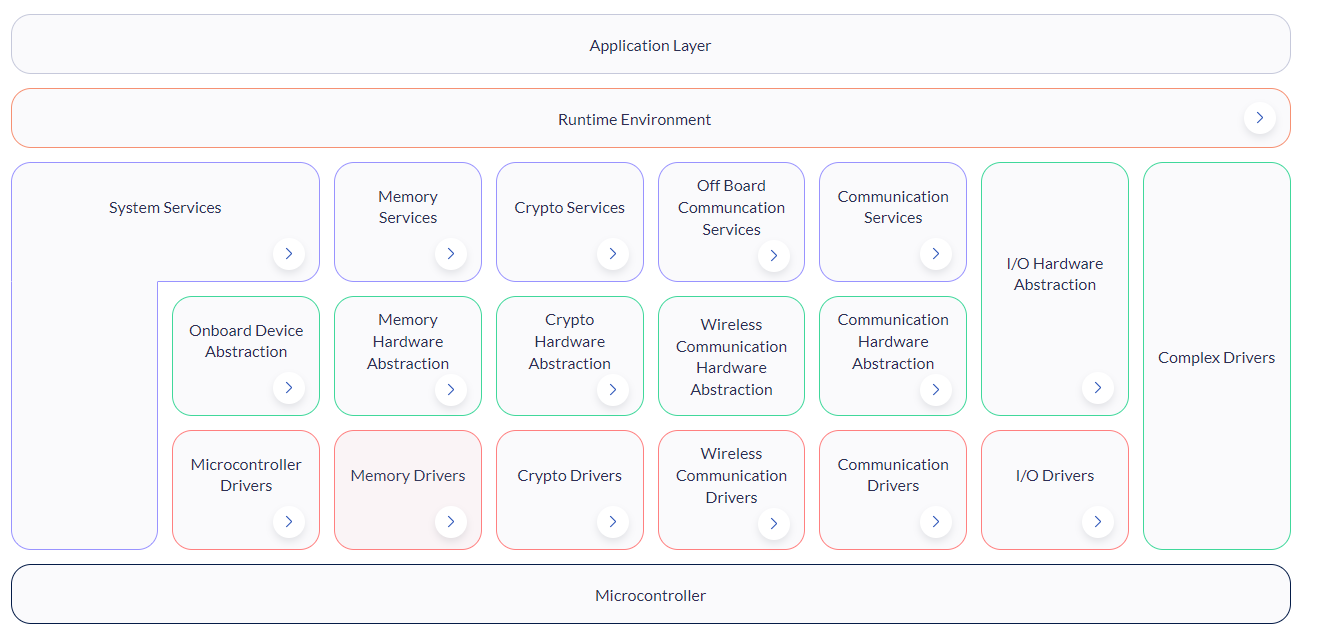
从官往图中可以看出autosar作为汽车ECU软件架构,是通过分层来实现软硬件隔离。就像大多数操作系统一样,通过分层实现软件架构的最通用化。
上面的框框有点零碎,我们试着来归纳下,抽象成下图。 可以更清晰看出它的层级关系。
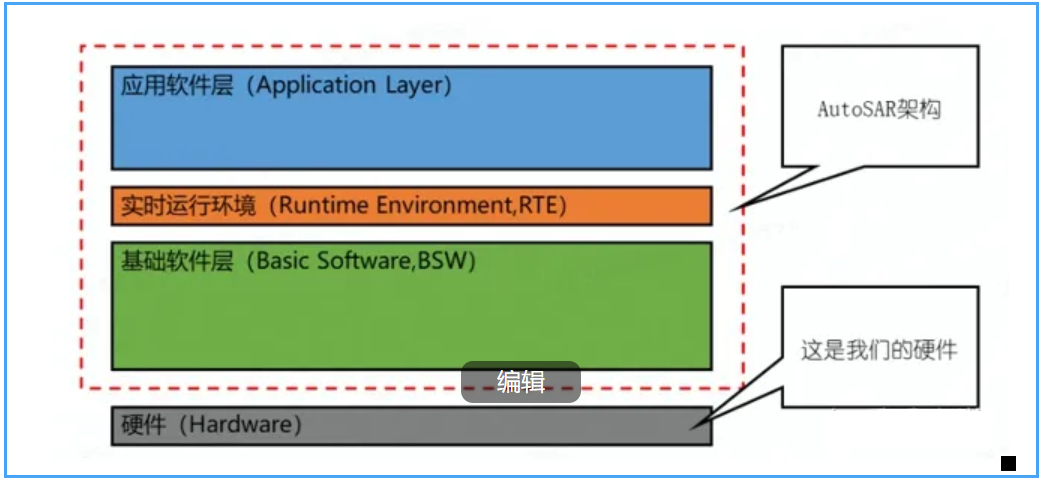
为了实现应用程序和硬件模块之间的分离,AUTOSAR被抽象成四层:由上至下依次为:应用层(Application Layer)、运行时环境(Run Time Environment,RTE)、基础软件层(Basic Software,BSW)以及微控制器(Microcontroller)。
其中应用程序、实时运行环境(RTE)和基本软件(BSW) 是架构中三个软件层。作为汽车人, 因为有 AutoSar, 我们可以不受硬件改动影响,关注于软件层。
- 应用软件层:逻辑代码,基本上是与硬件无关的。
- 实时运行环境:应用程序的完整接口,软件组件之间的通信和通过RTE访问BSW。
- 基础软件层:分为三个主要层次和复杂的驱动因素: 服务、ECU(电子控制单元)抽象和微控制器抽象。服务进一步划分为代表系统、内存和通信服务的基础设施的功能组。
后续仔细讲解每一个小的组件模块。
2. App应用层
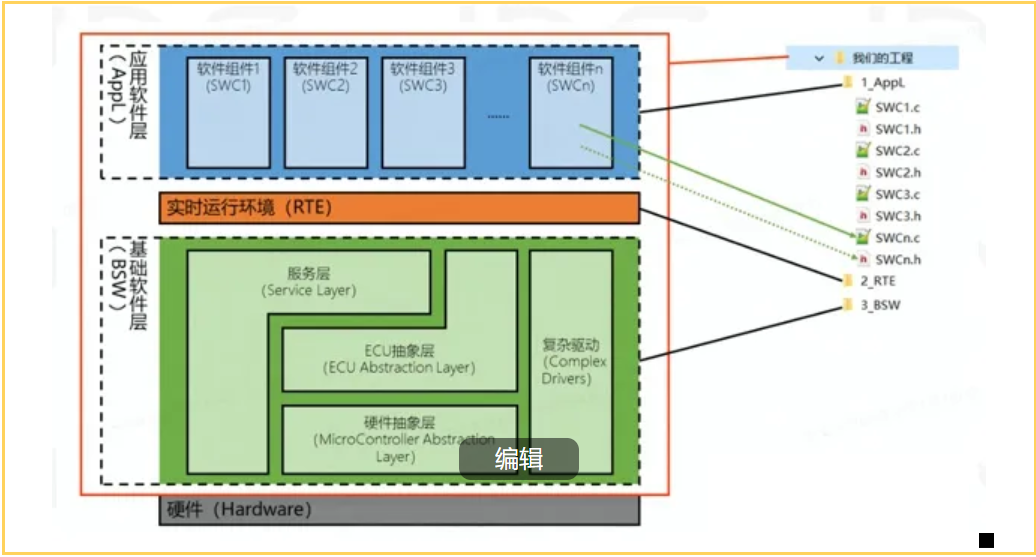
ApplicationLayer实现具体的应用功能,由软件组件(SWC)组成,基于AutoSAR设计的SWC组件能够提高上层应用软件的复用性和灵活性。
每一个SWC相当于一个.c文件,SWC和SWC之间的通信又会通过Port(端口)实现,SWC内部又有多个runable(运行实体)组成。
3. RTE运行时环境

目的:使SWC与ECU的映射无关,隔离APP和BSW
功能:提供跨ECU /ECU内部的通信管理
实现:
1. RTE对Runnables的运行支撑(Runanable的触发条件)
2. RTE对Ports支撑(S/RC/S port的通信方式)
3. 实现SWC之间的通信
4. RTE对数据一致性管理
4. BSW基础软件
4.1 BSW 分层
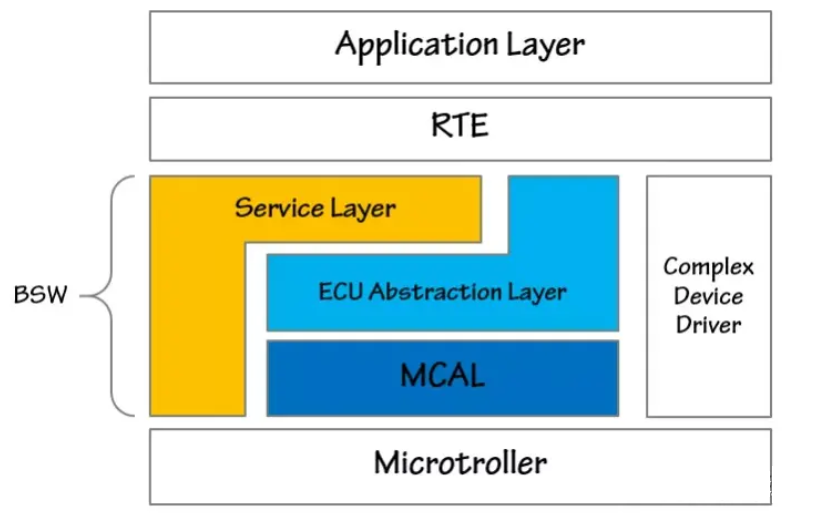
BSW被抽象划分为四部分:微控制器抽象层,ECU抽象层,服务层以及复杂驱动。
ServiceLayer:服务层
1. 提供给应用程序的服务,例如网络服务、内存管理和总线通信服务等
2. 诊断,非易失性内存管理,操作系统(OS),通讯
3. 内存和ECU管理
特别注意:CDD不属于BSW,它是独立Autosar架构的一些复杂驱动,直接通过CDD_SWC来操作硬件驱动。
ECUAbstraction Layer:ECU抽象层
提供统一的访问接口实现对通信、内存或者I/O的访问,从而无须考虑这些资源由微处理器提供还是由外部设备提供。
1. 使上层软件与ECU硬件设计无关
2. 包含ECU板上外部设备的驱动
3. 内部设备与外部设备的接口(I/O)
MCAL:Microcontroller Abstraction Layer 微控制器抽象层
1. 使上层软件与微控制器硬件无关,实现软硬件隔离。
2. 实现MCU中外设的驱动,可以用来访问内存、通信和I/O等
复杂驱动(CCD)
层跨越于微控制器硬件层和RTE之间,其主要任务是整合具有特殊目的且不能用MCAL进行配置的非标准功能模块,将该部分功能嵌入到AUTOSAR基础软件层中,从而实现处理复杂传感器以及执行器的特定功能和时间要求。
4.1 BSW 组件
如下图所示:
基础软件层的组件及其功能对应如下:
1)系统:提供标准化的规定(针对操作系统、定时器以及错误存储器)、ECU特定的服务(ECU状态管理、看门狗管理)和库函数;
2)内存:对内部和外部的内存(非易失性存储器)的访问入口进行标准化;
3)通信:对汽车网络系统、ECU通信系统以及ECU内部软件的访问入口进行标准化;
4)输入/输出:对传感器、执行器以及ECU外设的访问入口进行标准化;
同时,基础软件层模块按照类型可以分为驱动模块、接口模块、处理模块以及管理器。
1、驱动模块
驱动模块包含了控制和使用内部或者外部器件的功能,分为内部驱动和外部驱动。
1)内部驱动
内部器件位于微控制器(单片机)的内部,比如内部EEPROM、内部CAN控制器、内部ADC模块等。它主要是针对单片机内部器件资源的驱动程序,这部分驱动程序属于微控制器抽象层(MCAL)。
2)外部驱动
外部器件是指单片机外部的ECU硬件,比如外部EEPROM、外部看门狗、外部Flash等。外部驱动程序就是针对单片机外部硬件资源的驱动程序,属于ECU抽象层。外部驱动程序需要通过微控制器抽象层(MCAL)驱动程序来实现对外部器件的驱动。这种方法下AUTOSAR也支持嵌入在系统基础芯片(SBCs)中的组件,像收发器以及看门狗等。例如,使用SPI通信接口的外部EEPROM驱动程序是通过SPI总线处理程序来驱动外部EEPROM的。但是有一种例外,对于和内存映射相关的外部器件(如外部Flash存储器),其驱动程序是可以直接对微控制器进行存取访问的,所以这部分驱动程序属于微控制器抽象层(MCAL)。
2、接口模块
接口模块包含了对其次级模块进行抽象的功能,比如对一个特定功能的硬件进行抽象。它提供一个通用的接口函数(API)来访问一种特定的器件类型,且与该类型器件的数目无关,同时也与器件的具体硬件实现无关。
接口模块不会改变数据的内容。一般来说,接口属于ECU抽象层。例如,CAN通信系统的接口模块提供一个通用的接口函数来访问CAN通信网络,并且与ECU上CAN控制器的数目以及硬件实现无关。
3、处理模块
处理模块是一个专用的接口,它控制一个或多个客户端对一个或多个驱动程序进行并行、多重以及异步地访问。也就是说,它起着缓冲、队列、仲裁以及多路复用的功能。同时,处理程序也不会改变数据本身的内容。处理模块通常会并入驱动程序或是接口模块中(如SPIHandlerDriver、ADC Driver等)。
4、管理器
管理器为多重的客户端提供特定的服务。当单纯的处理程序不能满足对多重的客户端进行抽象时,就需要用到管理器来进行处理。除了处理功能外,管理器还可以对数据内容进行评估、改变或是适应数据内容。
一般而言,管理器属于服务层。例如,非易失性随机存储器(NVRAM)的管理器负责对内部或是外部存储设备进行并行的访问,如Flash、EEPROM存储器等。同时,它也可以完成分布式并且可靠的数据存储、数据校验以及默认值的规定等。
5. MCAL微控制器抽象层
MCAL就是硬件驱动的封装,比如CAN、ETH、SPI等外设驱动封装,和芯片息息相关。一般都是购买芯片原厂MCAL的软件包。
主要分为4大模块:
微控制器驱动
1) GPT:General Purpose Timer Driver,通用定时器,为操作系统或者其他基础软件模块提供计时功能
2) Watchdog:看门狗驱动,除防止程序跑飞基本功能外,功能安全还使用看门狗进行程序流监控,比如监控程序执行时间、执行顺序等。
3) MCU:Microcontroller Unit Driver,基本的MCU设置:时钟、休眠、复位设置等。
4) Core Test:芯片内核测试,提供上电或者周期检测两种方式,检测结果能触发中断。
存储器驱动
1) Flash Test & Ram Test:存储器测试驱动。
2) Flash/Eep Driver:提供基本的存储器操作,如初始化,擦除,写入,读取等。
通信驱动
CAN、ETH、LIN、SPI等通讯外设的通信功能实现
I/O驱动
1) Port:所有端口的统称,包含了(DIO和配置成特有功能的io口)
2) ADC:模拟/数字转换器,采样模拟信号,转成数字信号。
3) DIO:Digital Input/Output Driver,数字输入输出驱动,也就是配置成GPIO功能,实现通用的输入输出功能。
4) PWM:生成周期和频率可变的PWM方波
5) ICU:Input Caputre Unit,输入捕获单元,捕获方波周期或者捕获方波电平持续时间。
6) OCU:Output Compare Unit,输出比较单元,基于定时器单元的比较模块。
参考文献
| 面包板社区 | 浅论汽车电子行业的汽车开放系统架构AUTOSAR-汽车 |
| 汽车工程师谈技术 | AUTOSAR架构 - 知乎 |
