基于RK3588全高端智能终端机器人主板
一、小尺寸板型设计
该款主板为小型板,尺寸仅为125*85mm,更小更紧凑,可完美适应各类高端智能自助终端;
二、八核高端处理器
采用RK3588S八核64位处理器,8nm LP制程,主频最高达2.4GHz,搭载Android 12.0操作系统,集成ARM Mali-G610 MP4四核GPU,内置AI加速器NPU,可提供6Tops算力,性能卓越;
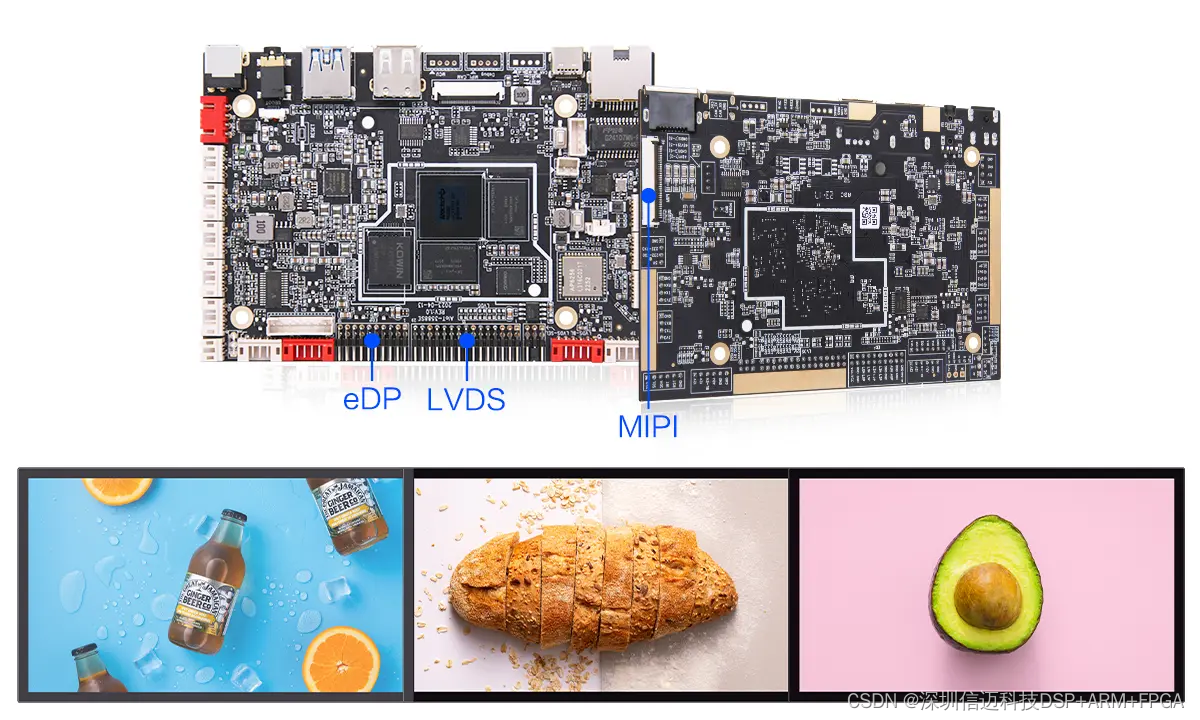
三、多显示接口三屏异显
支持LVDS/eDP/MIPI输出,其中LVDS屏最大支持1920*1200的分辨率,eDP屏最大支持3840*2160的分辨率,MIPI屏最大支持1920*1200的分辨率,可支持三屏异显;
四、支持USB/MIPI摄像头
支持USB单双目摄像头,和MIPI摄像头,MIPI接口可以支持1x4-lane@2.5Gbps/lane,最高可以支持48M像素(8064X6048);
五、丰富的外设扩展接口
AIoT-3588SE具备丰富的扩展接口,包括6个USB接口(2个USB3.0,4个USB2.0),3路串口(2路TTL,1路RS232),1路IIC接口(可接TP等外设),4路GPIO接口,1路ADC接口,可支持行业主流外设即插即用,充分满足终端设备的功能扩展;
六、高速率网络通信能力
支持10/100/1000M自适应以太网,内置WiFi,支持蓝牙5.0,让网络通讯拥有更高的速率;
七、支持系统深度定制
默认Android12.0操作系统,可支持Linux、OpenHarmony等多种操作系统,为终端产品研产提供安全稳定的系统环境。支持深度系统定制,可为用户提供系统调用接口API 参考代码,完美支持上层应用APP开发;
八、应用场景
AIoT-3588SE主要应用于行业专用平板电脑、双屏双触智能终端、机器人、运动魔镜等领域。
RK3588核心板在工业机器人控制产品中可以发挥重要作用,为工业自动化和机器人控制提供高性能的计算和多媒体处理能力。以下是RK3588核心板在工业机器人控制产品中的应用方案:
运动控制:
RK3588核心板可以用于控制工业机器人的运动,包括关节控制、轨迹规划和速度控制。它支持多轴控制,使机器人能够执行精确的运动任务。
视觉系统:
工业机器人通常配备视觉系统,用于识别和定位对象。RK3588的高性能计算能力支持复杂的图像处理和机器视觉任务,如对象识别、视觉导航和自动校正。
传感器数据处理:
机器人需要与各种传感器(如激光雷达、摄像头、力传感器)进行交互,以获取环境信息。RK3588核心板可以处理和分析传感器数据,用于决策和控制。
路径规划和碰撞检测:
RK3588支持高级路径规划和碰撞检测算法,有助于机器人规避障碍物、规划最优路径和执行复杂的任务。
远程监控和控制:
工业机器人通常需要远程监控和控制,以便操作员可以远程管理机器人的运作。RK3588核心板支持远程访问和远程控制功能。
人机界面(HMI):
它可以用于创建直观的人机界面,使操作员能够轻松配置和监控机器人的运作。这包括触摸屏界面和多媒体反馈。
自动化任务:
RK3588核心板可以用于执行各种自动化任务,如装配、焊接、涂装、拾取和放置,提高了生产效率和一致性。
安全性:
在工业机器人应用中,安全性至关重要。RK3588可以支持安全控制和紧急停止功能,以确保操作员和设备的安全。
网络连接:
核心板支持多种通信接口,包括以太网和现场总线(如EtherCAT),以便与其他自动化设备和系统进行通信。