32阵元 MVDR和DREC DOA估计波束方向图对比
32阵元 MVDR和DREC DOA估计波束方向图对比
一、原理
MVDR原理:https://zhuanlan.zhihu.com/p/457528114
DREC原理(无失真响应特征干扰相消器):http://radarst.ijournal.cn/html/2019/3/201903018.html
主要参数:
阵元:32个阵元,可以设置。
期望信号:1个,角度、信噪比可以设置。
干扰信号:2个,角度、信噪比可以设置。
二、效果
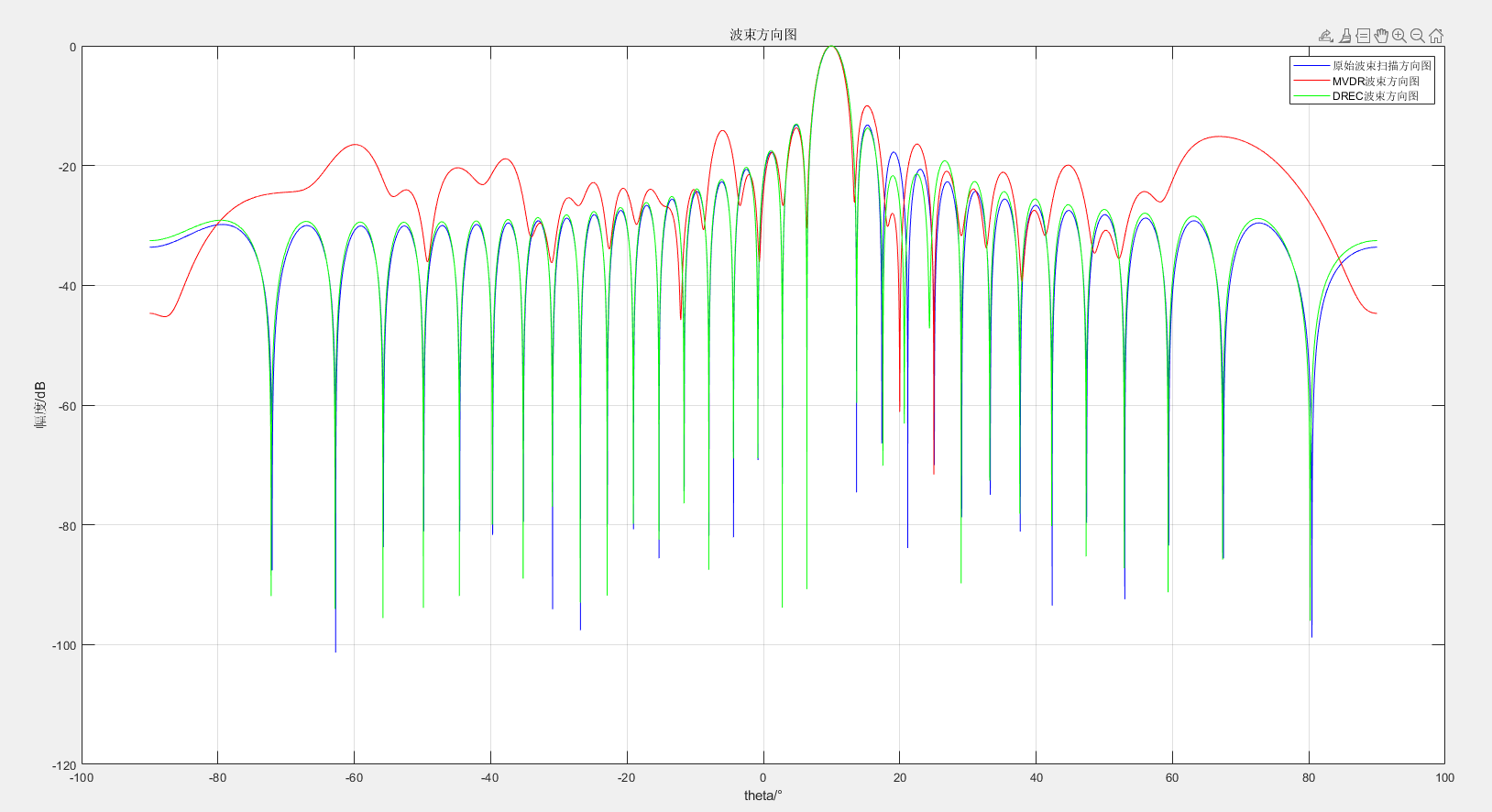
波束方向图效果:
三、代码
部分代码:
clc;
clear all;
close all;
%%
v=2; %波长为2
d =v/2; %阵元间距
N=32; %阵元个数
theta_3db = 2/N*180/pi; %-3db波束宽度
for ix=1:1:NA(ix,1)=(ix-1)*d;%阵元间距向量
end%% 接收信号模型
fs=10; %信号频率
fj1=1; %干扰1频率
fj2=2; %干扰2频率SNR= -10; %信噪比
JNR1=20; %干噪比1
JNR2=20; %干噪比2theta_s=10*pi/180; %信号入射方向
theta_j1=20*pi/180; %干扰1,间距大于主瓣宽度
theta_j2=25*pi/180; %干扰2,间距大于主瓣宽度A0=sqrt(10^(SNR/10)); %信号幅度
A1=sqrt(10^(JNR1/10));%干扰1幅度
A2=sqrt(10^(JNR2/10));%干扰2幅度
for k=1:1:Nas(k,1)=exp(j*2*pi*sin(theta_s)*A(k,1)/v); %信号方向导向矢量aj1(k,1)=exp(j*2*pi*sin(theta_j1)*A(k,1)/v);%干扰1方向导向矢量aj2(k,1)=exp(j*2*pi*sin(theta_j2)*A(k,1)/v);%干扰2方向导向矢量
end
M =1000;%快拍数
t=0:1/(4*fs):(M-1)/(4*fs);%快拍时间T=length(t);%快拍时间长度
S0=A0*exp(sqrt(-1)*(2*pi*fs*t+pi*rand(1,T))); %构造信号
J1=A1*exp(sqrt(-1)*(2*pi*fj1*t+pi*rand(1,T))); %构造干扰信号1
J2=A2*exp(sqrt(-1)*(2*pi*fj2*t+pi*rand(1,T))); %构造干扰信号2 S=as*S0; %信号乘以信号方向导向矢量
I1=aj1*J1;%干扰1乘以干扰1方向导向矢量
I2=aj2*J2;%干扰2乘以干扰2方向导向矢量Noise=zeros(N,T);%构造归一化高斯噪声
for k=1:1:NNoise(k,:)=(randn(1,T)+sqrt(-1)*randn(1,T))/sqrt(2);
endX=S+I1+I2+Noise; % 叠加两个干扰信号和噪声,得到新的信号X
R=X*X'/T; % 干扰和噪声的协方差矩阵%% 图形绘制
figure(1);
Fa=20*log10(abs(F_s)./max_st); %归一化方向图 db
plot(theta_scan/pi*180, Fa,'b');hold on
Fa=20*log10(abs(Fsum)./maxs);%归一化方向图 db
plot(theta_scan/pi*180, Fa,'r'); grid on;Fa1=20*log10(abs(Fsum1)./maxs1);%归一化方向图 db
plot(theta_scan/pi*180, Fa1,'g');
xlabel('theta/°');
ylabel('幅度/dB');
title('波束方向图');
legend('原始波束扫描方向图','MVDR波束方向图','DREC波束方向图')
四、信噪比SNR和信干噪比SINR的关系
信噪比的表达式为:
S N R = 10 lg P S P N S N R=10 \lg \frac{P_S}{P_N} SNR=10lgPNPS,其中:
SNR:信噪比,单位是dB。
PS:信号的有效功率。
PN:噪声的有效功率。
信干噪比SINR(Signal to Interference plus Noise Ratio)指的是系统中信号与干扰和噪声之和的比。
信干噪比表达式为:
S I N R = 10 lg P S P I + P N S I N R=10 \lg \frac{P_S}{P_I+P_N} SINR=10lgPI+PNPS,其中:
SINR:信干噪比,单位是dB。
PS:信号的有效功率。
PN:噪声的有效功率。
PI:干扰信号的有效功率。
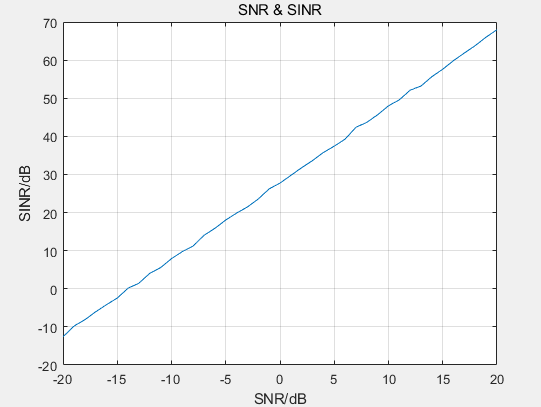
由上述理论可知,SNR增加,即相对于Ps增加,当PI和PN不变时,SINR会逐渐增大,如下图所示是SNR和SINR的关系:
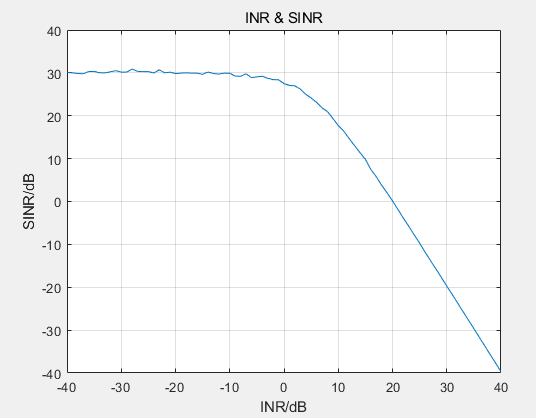
五、干噪比INR和信干噪比SINR的关系
由第四节所述,当干噪比INR增加时,相当于PI增加,因此当PN和PS不变时,SINR会逐渐降低。如下图所示:
代码下载链接:https://mbd.pub/o/bread/ZZicm5Zy