ros2+gazebo(ign)激光雷达+摄像头模拟
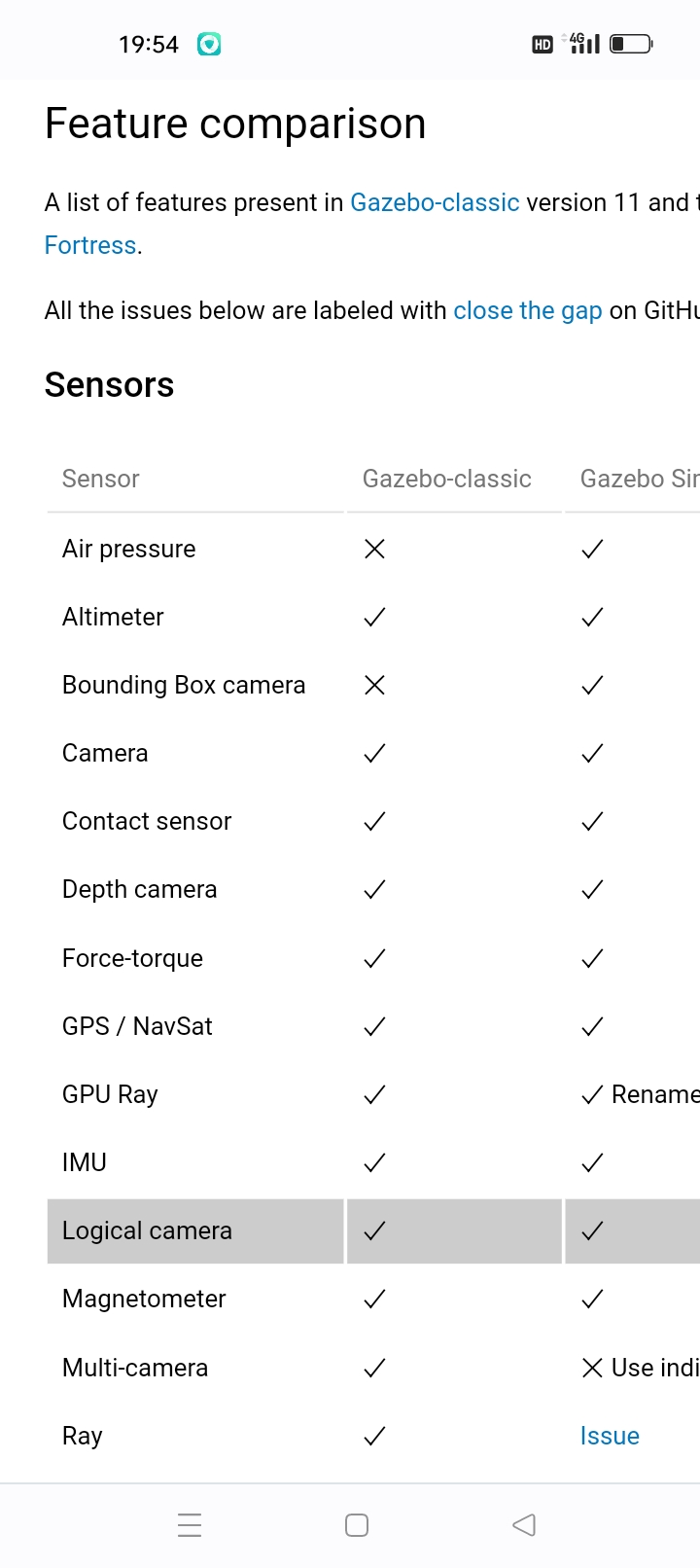
虽然ign不能模拟雷达,但是摄线头是可以模拟的。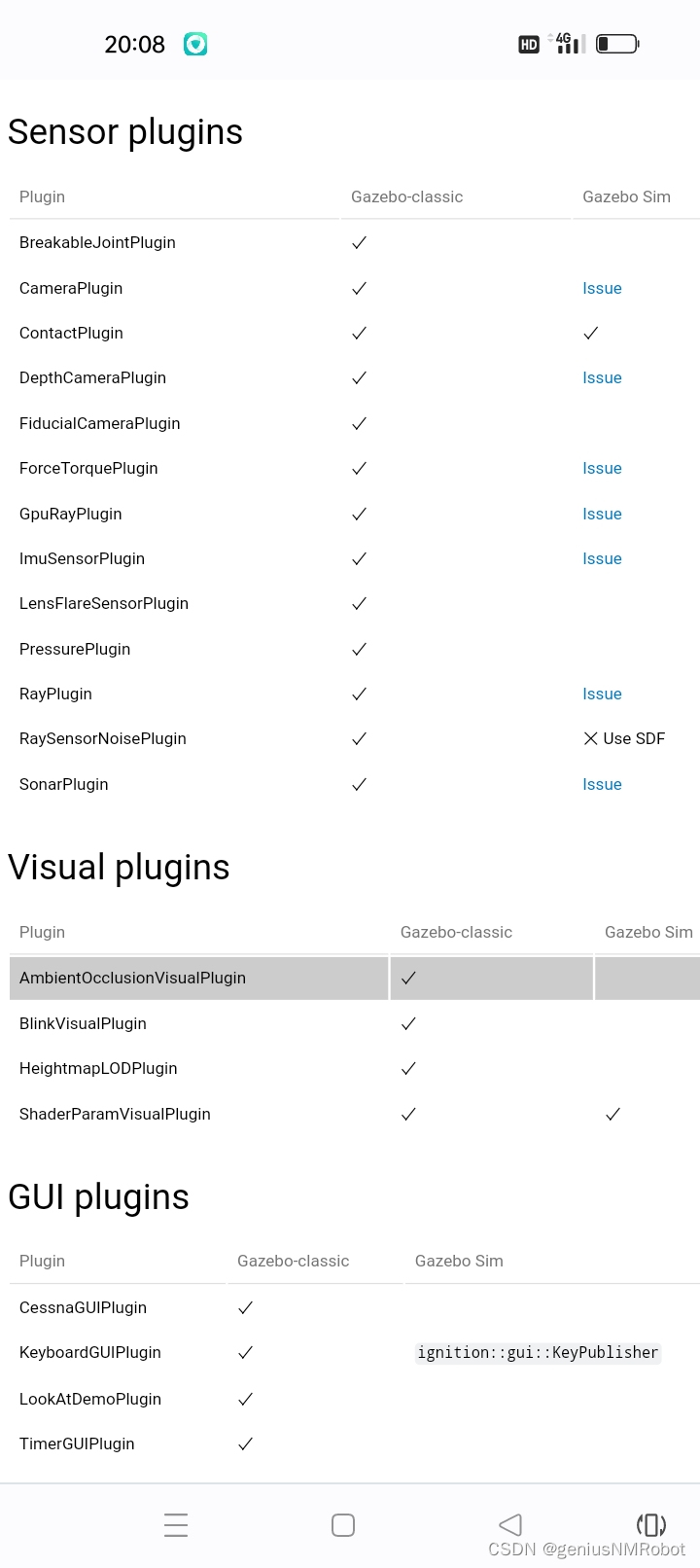
好了现在都不用模拟了,ign摄线头也模拟不了。
ros2+ign gazebo无法全部模拟摄线头和雷达。
只能有这样2个解决方法:
方法1:使用ros2+ gazebo11
方案2:使用ros2+买一个实体激光雷达+模拟雷达+自己写一个虚拟驱动连接ign的摄线头和ros2.
虽然ign不能模拟雷达,但是摄线头是可以模拟的。
好了现在都不用模拟了,ign摄线头也模拟不了。
ros2+ign gazebo无法全部模拟摄线头和雷达。
只能有这样2个解决方法:
方法1:使用ros2+ gazebo11
方案2:使用ros2+买一个实体激光雷达+模拟雷达+自己写一个虚拟驱动连接ign的摄线头和ros2.