Hankel alternative view of Koopman (HAVOK) analysis

文章目录
- 参考文献
- Lorenz 吸引子
- Eigen-Time Delay Coordinates
- 从数据计算导数
- 对非线性动态系统的稀疏辨识 (SINDY)
参考文献

Lorenz 吸引子
使用 ode45 生成序列
%// generate Data
sigma = 10; %// Lorenz's parameters (chaotic)
beta = 8/3;
rho = 28;
n = 3;
x0=[-8; 8; 27]; %// Initial condition
%// Integrate
dt = 0.001;
tspan=[dt:dt:200];
N = length(tspan);
options = odeset('RelTol',1e-12,'AbsTol',1e-12*ones(1,n));
[t,xdat]=ode45(@(t,x) lorenz(t,x,sigma,beta,rho),tspan,x0,options);
%// Plot
figure
L = 1:200000;
plot3(xdat(L,1),xdat(L,2),xdat(L,3),'Color',[.1 .1 .1],'LineWidth',1.5)
axis on
view(-5,12)
axis tight
xlabel('x'), ylabel('y'), zlabel('z')
set(gca,'FontSize',14)
set(gcf,'Position',[100 100 600 400])
set(gcf,'PaperPositionMode','auto')

洛伦兹系统的 x x x 分量
figure
plot(tspan,xdat(:,1),'k','LineWidth',2)
xlabel('t'), ylabel('x')
set(gca,'XTick',[0 10 20 30 40 50 60 70 80 90 100],'YTick',[-20 -10 0 10 20])
set(gcf,'Position',[100 100 550 300])
xlim([0 100])
set(gcf,'PaperPositionMode','auto')

Eigen-Time Delay Coordinates
将lorenz系统的第一个分量为分析对象,通过堆叠时滞序列建立 Hankel 矩阵,然后做奇异值分解:

stackmax = 100; %// the number of shift-stacked rows
%%// EIGEN-TIME DELAY COORDINATES
clear V, clear dV, clear H
H = zeros(stackmax,size(xdat,1)-stackmax);
for k=1:stackmax
H(k,:) = xdat(k:end-stackmax-1+k,1);
end
[U,S,V] = svd(H,'econ');
对 V ∗ V^* V∗ 的前三行(奇异值最大的三个动态模式)作图
figure
L = 1:170000;
plot3(V(L,1),V(L,2),V(L,3),'Color',[.1 .1 .1],'LineWidth',1.5)
axis tight
xlabel('v_1'), ylabel('v_2'), zlabel('v_3')
set(gca,'FontSize',14)
view(34,22)
set(gcf,'Position',[100 100 600 400])
set(gcf,'PaperPositionMode','auto')



从数据计算导数
利用最优SVHT确定奇异值的截断值,从而确定 H H H 的主成分个数 r r r
sigs = diag(S);
beta = size(H,1)/size(H,2);
thresh = optimal_SVHT_coef(beta,0) * median(sigs);
r = length(sigs(sigs>thresh))
r=min(rmax,r)
利用四阶中心差分法计算
V
V
V 的导数
V
˙
\dot{V}
V˙
V
˙
(
t
−
2
)
=
−
V
(
t
+
2
)
+
8
∗
V
(
t
+
1
)
−
8
∗
V
(
t
−
1
)
+
V
(
t
−
2
)
12
d
t
\dot{V}(t-2) = \frac{-V(t+2)+8*V(t+1)-8*V(t-1)+V(t-2)}{12dt}
V˙(t−2)=12dt−V(t+2)+8∗V(t+1)−8∗V(t−1)+V(t−2)
%%// COMPUTE DERIVATIVES
%// compute derivative using fourth order central difference
%// use TVRegDiff if more error
dV = zeros(length(V)-5,r);
for i=3:length(V)-3
for k=1:r
dV(i-2,k) = (1/(12*dt))*(-V(i+2,k)+8*V(i+1,k)-8*V(i-1,k)+V(i-2,k));
end
end
完了之后令 x = V , x ˙ = V ˙ x = V, \dot{x}=\dot{V} x=V,x˙=V˙
%// concatenate
x = V(3:end-3,1:r);
dx = dV;
对非线性动态系统的稀疏辨识 (SINDY)
文献:https://www.pnas.org/content/pnas/113/15/3932.full.pdf
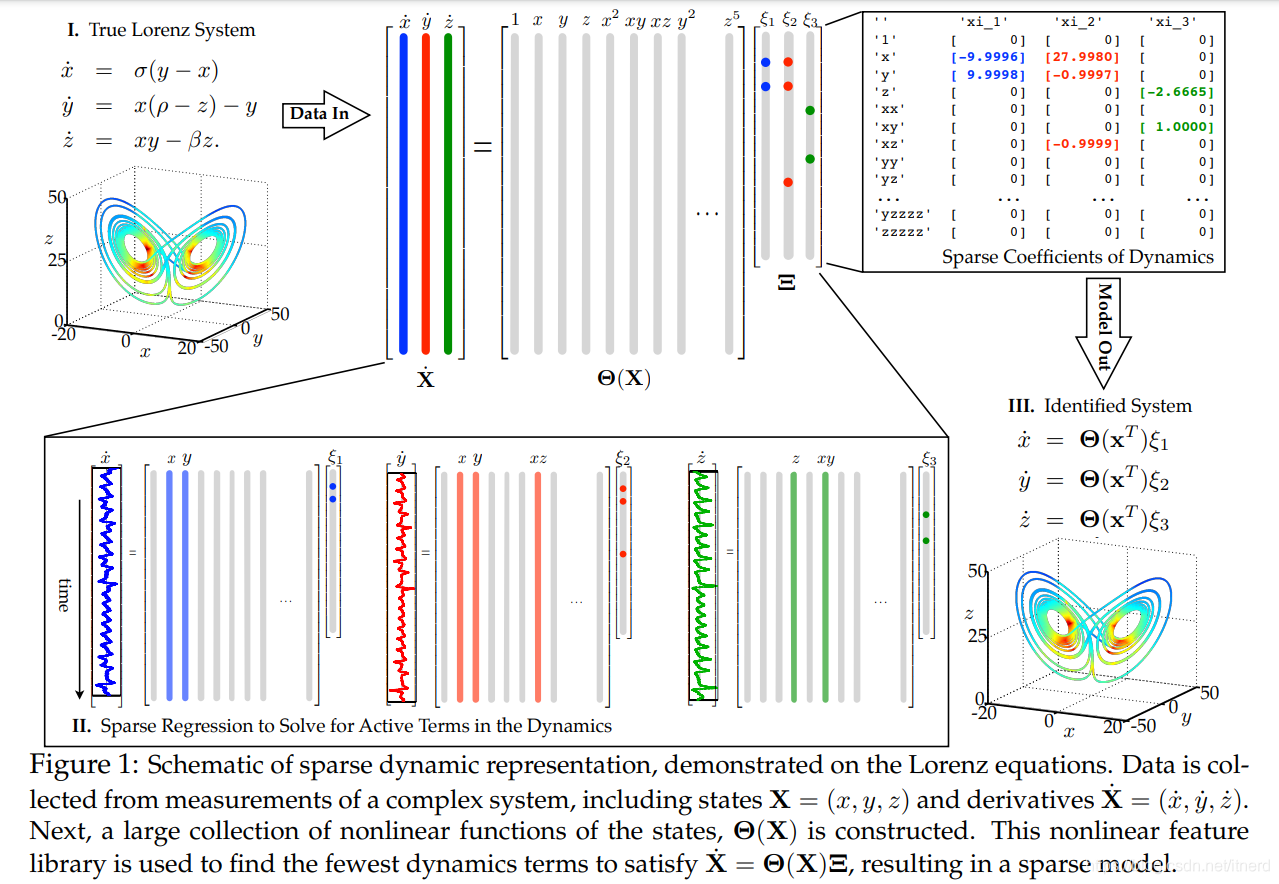
用一组人为选定的基函数(多项式函数、正弦函数等)对观测量进行特征扩充,
X
→
Θ
(
X
)
X \to \Theta(X)
X→Θ(X),用如下的 poolData 函数实现:
function yout = poolData(yin,nVars,polyorder,usesine)
%// Copyright 2015, All Rights Reserved
%// Code by Steven L. Brunton
%// For Paper, "Discovering Governing Equations from Data:
%// Sparse Identification of Nonlinear Dynamical Systems"
%// by S. L. Brunton, J. L. Proctor, and J. N. Kutz
n = size(yin,1);
%// yout = zeros(n,1+nVars+(nVars*(nVars+1)/2)+(nVars*(nVars+1)*(nVars+2)/(2*3))+11);
ind = 1;
%// poly order 0
yout(:,ind) = ones(n,1);
ind = ind+1;
%// poly order 1
for i=1:nVars
yout(:,ind) = yin(:,i);
ind = ind+1;
end
if(polyorder>=2)
%// poly order 2
for i=1:nVars
for j=i:nVars
yout(:,ind) = yin(:,i).*yin(:,j);
ind = ind+1;
end
end
end
if(polyorder>=3)
%// poly order 3
for i=1:nVars
for j=i:nVars
for k=j:nVars
yout(:,ind) = yin(:,i).*yin(:,j).*yin(:,k);
ind = ind+1;
end
end
end
end
if(polyorder>=4)
%// poly order 4
for i=1:nVars
for j=i:nVars
for k=j:nVars
for l=k:nVars
yout(:,ind) = yin(:,i).*yin(:,j).*yin(:,k).*yin(:,l);
ind = ind+1;
end
end
end
end
end
%// poly order 5, 6, 7 ...
if(usesine)
for k=1:10;
yout = [yout sin(k*yin) cos(k*yin)];
end
end
然后用稀疏回归算法求解:
V
˙
=
Θ
(
V
)
Ξ
\dot{V} = \Theta(V) \Xi
V˙=Θ(V)Ξ
稀疏线性回归算法可以用 LASSO,也可以用序贯阈值最小二乘法 (sequential thresholded least-squares algorithm),即每次最小二乘求出权重后,将低于阈值的权重强制设为0,然后用剩下的特征再做最小二乘,迭代若干次
function Xi = sparsifyDynamics(Theta,dXdt,lambda,n)
%// Copyright 2015, All Rights Reserved
%// Code by Steven L. Brunton
%// For Paper, "Discovering Governing Equations from Data:
%// Sparse Identification of Nonlinear Dynamical Systems"
%// by S. L. Brunton, J. L. Proctor, and J. N. Kutz
%// compute Sparse regression: sequential least squares
Xi = Theta\dXdt; %// initial guess: Least-squares
%// lambda is our sparsification knob.
for k=1:10
smallinds = (abs(Xi)<lambda); %// find small coefficients
Xi(smallinds)=0; %// and threshold
for ind = 1:n %// n is state dimension
biginds = ~smallinds(:,ind);
%// Regress dynamics onto remaining terms to find sparse Xi
Xi(biginds,ind) = Theta(:,biginds)\dXdt(:,ind);
end
end
回归代码,计算出 Ξ \Xi Ξ
%%// BUILD HAVOK REGRESSION MODEL ON TIME DELAY COORDINATES
%// This implementation uses the SINDY code, but least-squares works too
%// Build library of nonlinear time series
polyorder = 1;
Theta = poolData(x,r,1,0);
%// normalize columns of Theta (required in new time-delay coords)
for k=1:size(Theta,2)
normTheta(k) = norm(Theta(:,k));
Theta(:,k) = Theta(:,k)/normTheta(k);
end
m = size(Theta,2);
%// compute Sparse regression: sequential least squares
%// requires different lambda parameters for each column
clear Xi
for k=1:r-1
Xi(:,k) = sparsifyDynamics(Theta,dx(:,k),lambda*k,1); %// lambda = 0 gives better results
end
Theta = poolData(x,r,1,0);
for k=1:length(Xi)
Xi(k,:) = Xi(k,:)/normTheta(k);
end
由于设置 polyorder = 1,相当于:
V
˙
=
[
1
;
V
]
Ξ
\dot{V} = [\mathbf{1};V]\Xi
V˙=[1;V]Ξ
但在求出
Ξ
\Xi
Ξ 之后,并不是建立
V
V
V 的所有分量的线性模型,而是将
V
V
V 的第
r
r
r 项(SVD截断后的最后一项)最为外部扰动项,而构建关于前
r
−
1
r-1
r−1 个分量的线性模型

即:
v
˙
=
A
v
+
B
v
r
\dot{v} = Av + Bv_r
v˙=Av+Bvr其中
v
=
[
v
1
…
v
r
−
1
]
T
v=\begin{bmatrix} v_1& \ldots&v_{r-1}\end{bmatrix}^T
v=[v1…vr−1]T
A = Xi(2:r+1,1:r-1)'; %// 第一项为常数项对应的稀疏,所以从2开始
B = A(:,r);
A = A(:,1:r-1);
%
L = 1:50000;
sys = ss(A,B,eye(r-1),0*B);
[y,t] = lsim(sys,x(L,r),dt*(L-1),x(1,1:r-1));
%%// Part 4: Model Time Series
L = 300:25000;
L2 = 300:50:25000;
figure
subplot(2,1,1)
plot(tspan(L),x(L,1),'Color',[.4 .4 .4],'LineWidth',2.5)
hold on
plot(tspan(L2),y(L2,1),'.','Color',[0 0 .5],'LineWidth',5,'MarkerSize',15)
xlim([0 max(tspan(L))])
ylim([-.0051 .005])
ylabel('v_1')
box on
subplot(2,1,2)
plot(tspan(L),x(L,r),'Color',[.5 0 0],'LineWidth',1.5)
xlim([0 max(tspan(L))])
ylim([-.025 .024])
xlabel('t'), ylabel('v_{15}')
box on
set(gcf,'Position',[100 100 550 350])
set(gcf,'PaperPositionMode','auto')
