深度学习模型之yolov8实例分割模型TesorRT部署-python版本
1 模型转换
从github上下载官方yolov8版本,当前使用的版本是2023年9月份更新的版本,作者一直在更新。官网地址
2 加载模型
模型的训练和测试在官方文档上,有详细的说明,yolov8中文文档这里不做过多说明,v8现在训练是真的方便了,环境部署好之后,几行代码就跑起来了,例如:
from ultralytics import YOLO
from setproctitle import setproctitle
setproctitle("python|yolov8-seg 20231211")# 载入一个模型
model = YOLO('yolov8n-seg.yaml') # 从YAML构建一个新模型
# model = YOLO('/data/siping/preweights/yolov8n-seg.pt') # 载入预训练模型(推荐用于训练)
# model = YOLO('yolov8m-seg.yaml').load('/data/siping/preweights/yolov8m.pt') # 从YAML构建并传递权重# 训练模型
model.train(task='segment',data='/ultralytics/cfg/datasets/coco128-seg.yaml ',epochs=200,batch=32,imgsz=320,device=1,translate=0) # 训练模型model.val()# Export the model
model.export(format='onnx',imgsz=(320,320),opset=12)
模型训练完成后,对保存下来的best.pt模型转换为onnx模型,由于后期会部署到NX和其他不同类型的显卡上,因此先转换为通用的onnx模型。导出onnx代码:
# Export the model
model.export(format='onnx',imgsz=(384,640),opset=12)
导出的操作可以直接在训练的代码最后面加入一行即可。
onnx模型导出成功后,将模型拷贝到需要运行的机器上,使用tensorrt转换为trt模型,后缀可以是trt或者engine,转换代码这里总结了两个版本的转换代码:
Tensotrt 7.1:
# -*- coding: utf-8 -*-
import tensorrt as trt
import sys
import osTRT_LOGGER = trt.Logger(trt.Logger.WARNING)
EXPLICIT_BATCH = 1 << (int)(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH)def printShape(engine):for i in range(engine.num_bindings):if engine.binding_is_input(i):print("input layer: {}, shape is: {} ".format(i, engine.get_binding_shape(i)))else:print("output layer: {} shape is: {} ".format(i, engine.get_binding_shape(i)))def onnx2trt(onnx_path, engine_path):with trt.Builder(TRT_LOGGER) as builder, builder.create_network(EXPLICIT_BATCH) as network, trt.OnnxParser(network, TRT_LOGGER) as parser:builder.max_workspace_size = 1 << 28 # 256MB#builder.set_fp16_mode(True) #builder.precision = trt.BuilderFlag.FP16 #builder.config.set_flag(trt.BuilderFlag.FP16) with open(onnx_path, 'rb') as model:parser.parse(model.read())engine = builder.build_cuda_engine(network)printShape(engine) with open(engine_path, "wb") as f:f.write(engine.serialize())if __name__ == "__main__": #onnx文件路径设置model_name = "20240115_yolov8Seg_Person"input_path = model_name+".onnx"#引擎文件保存路径设置root_dir = "/ai/good_model/"output_path = root_dir + model_name + '.engine'onnx2trt(input_path, output_path)一般是在NX上做模型转换,NX初始化的tensorrt版本较低,这个代码成功导出和部署使用。
tensorrt8.4.0.6版本转换代码:
# 导入必用依赖
import tensorrt as trt
#onnx文件路径设置
onnx_path="./repvgg.onnx"
#引擎文件保存路径设置
engine_path=r"classify.engine"
# 创建logger:日志记录器
logger = trt.Logger(trt.Logger.WARNING)# 创建构建器builder
builder = trt.Builder(logger)
# 预创建网络
network = builder.create_network(1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH))
# 加载onnx解析器
parser = trt.OnnxParser(network, logger)
success = parser.parse_from_file(onnx_path)
for idx in range(parser.num_errors):print(parser.get_error(idx))
if not success:print("failed----------------")pass # Error handling code here# builder配置
config = builder.create_builder_config()
# 分配显存作为工作区间,一般建议为显存一半的大小
config.max_workspace_size = 12 << 30 # 1 Mi
builder.max_batch_size = 1 serialized_engine = builder.build_serialized_network(network, config)
# 序列化生成engine文件
with open(engine_path, "wb") as f:f.write(serialized_engine)print("generate file success!")
这个可以成功导出8.4以上版本的onnx模型,包括CNN的分类模型等。
如果是在windows下做模型导出和测试,可以直接去官网下载一个Tensorrt对应版本的包,直接使用trtexec导出也可以。
3 算法部署
yolov8的分割模型部署代码参考yolov8 github的测试代码
3.1 加载trt模型
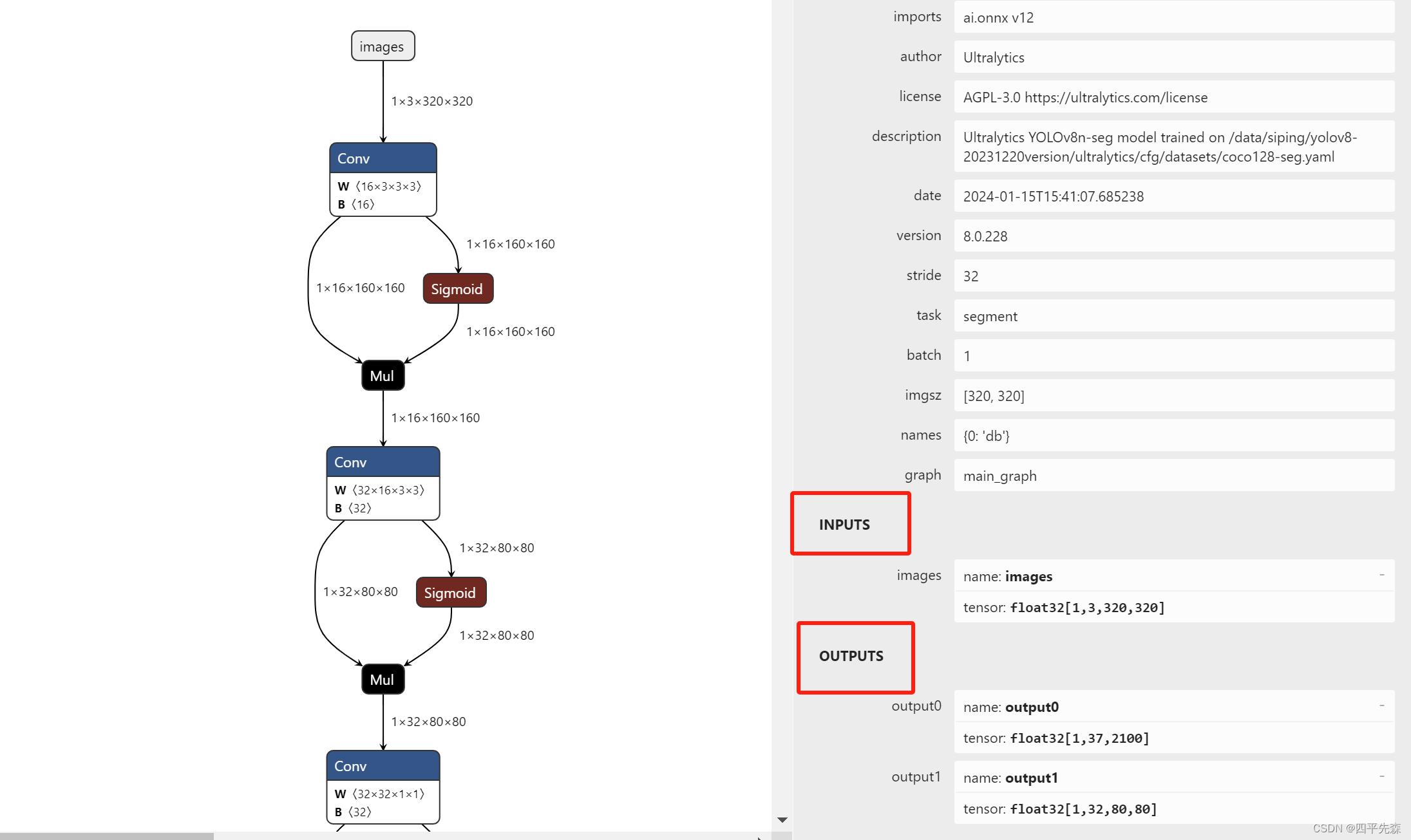
加载分割模型的trt模型需要注意的是模型的输入和输出的名称是否对应,可以将onnx模型通过netron查看模型的结构:
3.2 部署代码
部署是加载分割模型的代码:
#!/usr/bin/env python
# -*- coding: utf-8 -*-import cv2
import os
import torch
import numpy as np
import tensorrt as trt
from utils import opsdef select_device(device='', apex=False, batch_size=None):# device = 'cpu' or '0' or '0,1,2,3'cpu_request = str(device).lower() == 'cpu'if str(device) and not cpu_request: # if device requested other than 'cpu'os.environ['CUDA_VISIBLE_DEVICES'] = str(device) # set environment variableassert torch.cuda.is_available(), 'CUDA unavailable, invalid device %s requested' % device # check availablitycuda = False if cpu_request else torch.cuda.is_available()if cuda:c = 1024 ** 2 # bytes to MBng = torch.cuda.device_count()if ng > 1 and batch_size: # check that batch_size is compatible with device_countassert batch_size % ng == 0, 'batch-size %g not multiple of GPU count %g' % (batch_size, ng)x = [torch.cuda.get_device_properties(i) for i in range(ng)]s = 'Using CUDA ' + ('Apex ' if apex else '') # apex for mixed precision https://github.com/NVIDIA/apexfor i in range(0, ng):if i == 1:s = ' ' * len(s)print("%sdevice%g _CudaDeviceProperties(name='%s', total_memory=%dMB)" %(s, i, x[i].name, x[i].total_memory / c))else:print('Using CPU')print('') # skip a linereturn torch.device('cuda:0' if cuda else 'cpu')def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):# Resize and pad image while meeting stride-multiple constraintsshape = im.shape[:2] # current shape [height, width]if isinstance(new_shape, int):new_shape = (new_shape, new_shape)# Scale ratio (new / old)r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])if not scaleup: # only scale down, do not scale up (for better val mAP)r = min(r, 1.0)# Compute paddingratio = r, r # width, height ratiosnew_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh paddingif auto: # minimum rectangledw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh paddingelif scaleFill: # stretchdw, dh = 0.0, 0.0new_unpad = (new_shape[1], new_shape[0])ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratiosdw /= 2 # divide padding into 2 sidesdh /= 2if shape[::-1] != new_unpad: # resizeim = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))left, right = int(round(dw - 0.1)), int(round(dw + 0.1))im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add borderreturn im, ratio, (dw, dh)DEVICE = select_device('0')
SEGLABELS = ['dbseg']
SEGWEIGHT = '20240115_yolov8Seg_lift.engine'class TrtModelSeg():def __init__(self, engine_path, device,shapes=(1, 3, 320, 320)):""":param engine_path: Trt model path:param device: torch.device"""self.device = devicefrom collections import OrderedDict, namedtupleBinding = namedtuple('Binding', ('name', 'dtype', 'shape', 'data', 'ptr'))logger = trt.Logger(trt.Logger.INFO)with open(engine_path, 'rb') as f, trt.Runtime(logger) as runtime:model = runtime.deserialize_cuda_engine(f.read())self.context = model.create_execution_context()self.bindings = OrderedDict()dynamic = Falseself.input_name = model.get_binding_name(0)self.output_name = model.get_binding_name(1)self.output_name1 = model.get_binding_name(2)for index in range(model.num_bindings):name = model.get_binding_name(index)dtype = trt.nptype(model.get_binding_dtype(index))# print(model.get_binding_shape(index))if -1 in tuple(model.get_binding_shape(index)) and index == 0:self.context.set_binding_shape(index, shapes)shape = tuple(self.context.get_binding_shape(index))data = torch.from_numpy(np.empty(shape, dtype=np.dtype(dtype))).to(select_device(device))self.bindings[name] = Binding(name, dtype, shape, data, int(data.data_ptr()))self.binding_addrs = OrderedDict((n, d.ptr) for n, d in self.bindings.items())self.batch_size = self.bindings[self.input_name].shape[0]def __call__(self, img):""":param img: 输入Tensor 图片:return:"""# assert img.shape == self.bindings['input'].shape, (img.shape, self.bindings['input'].shape)if img.device == torch.device('cpu'):img = img.float().to(select_device(self.device))# print('in trt dynamic def----input shape is ----',img.shape)self.binding_addrs[self.input_name] = int(img.data_ptr())self.context.execute_v2(list(self.binding_addrs.values()))return [self.bindings['output0'].data, self.bindings['output1'].data]# 定义图片预处理函数
def get_input_img(image, img_size=[320, 320]):# Padded resizeimg,ratio,(dw,dh) = letterbox(image, img_size, stride=32, auto=False)img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416# img = img.transpose((2, 0, 1))[::-1]img = np.ascontiguousarray(img)img = torch.from_numpy(img).to(DEVICE)img = img.float() # uint8 to fp16/32img /= 255.0 # 0 - 255 to 0.0 - 1.0if img.ndimension() == 3:img = img.unsqueeze(0)return img,ratio,(dw,dh)#分割模型
class YoloSeg(object):def __init__(self,classes=[]):self.conf_thr = 0.4 # conf阈值self.iou_thr = 0.4 # iou阈值self.model = self._load_model()try:self.labels = self.model.labelsprint("Seg Using meta model ! ")except:self.labels = SEGLABELSprint("Seg Using no meta model ! ")self.classes = self._get_display_class(classes) if classes and isinstance(classes, list) else Noneself._warm_up(size=[320, 320])def _load_model(self):# Load seg modelprint("Load seg model! ",SEGWEIGHT)self.model = TrtModelSeg(SEGWEIGHT, DEVICE)return self.modeldef _get_display_class(self, classes):"""只计算classes中包含的类别Args:classes (list): 只显示classes中包含的类别,其他类别将被遗弃"""return [self.labels.index(c) for c in classes if c in self.labels]def _warm_up(self, size=[320, 320]):x = torch.randn((1, 3, *size)).float().to(DEVICE)self.model(x)#参考yolov8 segment/predict.py文件def detect_image(self, image):# 预处理img, ratio, (dw, dh) = get_input_img(image)# Inferencepreds = self.model(img)detpred = preds[0]masks = image#1.经过置信度和非极大值筛选的数值 NMSpred_nms = ops.non_max_suppression(detpred, self.conf_thr, self.iou_thr,nc=len(SEGLABELS))retina_masks = Trueproto = preds[1][-1] if len(preds[1]) == 3 else preds[1] # second output is len 3 if pt, but only 1 if exported# print("proto: ",len(preds[1]),proto.shape)print("pred_nms: ",len(pred_nms))#从预测输出中提取结果#pred_nms是掩码信息,如果有多个mask,选择面积最大的mask,因为是吊臂for i, pred in enumerate(pred_nms):print("len(pred): ", len(pred))#获取原图像的大小shape = image.shape# print("image: ",shape)if not len(pred): # save empty boxesmasks = Noneelif retina_masks:n_class = int(pred[:,5].item())print("n_class: ",n_class,SEGLABELS[n_class])#如果标签不等于dbif(n_class!=0):continue#对框坐标进行处理。pred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], shape)# print("pred[:, :4]: ",pred[:, :4])# 对分割结果进行后处理,输入的是proto、pred:,6:,pred[:,:4]为框坐标img.shape[:2]为(320,320)四个数据s_masks = ops.process_mask_native(proto[i], pred[:, 6:], pred[:, :4], shape[:2]) # HWC# 从(batch_size, height, width)的形状转换为(height, width, batch_size)的形状,并将结果存储在NumPy数组中。s_masks = (s_masks.cpu().numpy() * 255).astype(np.uint8)masks = s_masks.transpose(1, 2, 0)else:masks = ops.process_mask(proto[i], pred[:, 6:], pred[:, :4], img.shape[2:], upsample=True) # HWCpred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], shape)print("pred,masks: ", masks.shape)#返回预测结果和maskreturn pred_nms,masksdef detect(yolo, image_path):image = cv2.imdecode(np.fromfile(image_path, dtype=np.uint8), cv2.IMREAD_COLOR)pred_nms, masks = yolo.detect_image(image)return pred_nms, masksif __name__ == '__main__':image_path = r"1.jpg"model = TrtModelSeg(SEGWEIGHT, DEVICE,shapes=(1, 3, 320, 320))yoloseg = YoloSeg(SEGLABELS)pred_nms, masks = detect(yoloseg,image_path)cv2.imwrite("mask.jpg",masks)
ops.py文件:
# -*- coding: utf-8 -*-
# Ultralytics YOLO 🚀, AGPL-3.0 licenseimport contextlib
import math
import re
import timeimport cv2
import numpy as np
import torch
import torch.nn.functional as F
import torchvisionclass Profile(contextlib.ContextDecorator):"""YOLOv8 Profile class. Use as a decorator with @Profile() or as a context manager with 'with Profile():'.Example:```pythonfrom ultralytics.utils.ops import Profilewith Profile() as dt:pass # slow operation hereprint(dt) # prints "Elapsed time is 9.5367431640625e-07 s"```"""def __init__(self, t=0.0):"""Initialize the Profile class.Args:t (float): Initial time. Defaults to 0.0."""self.t = tself.cuda = torch.cuda.is_available()def __enter__(self):"""Start timing."""self.start = self.time()return selfdef __exit__(self, type, value, traceback): # noqa"""Stop timing."""self.dt = self.time() - self.start # delta-timeself.t += self.dt # accumulate dtdef __str__(self):"""Returns a human-readable string representing the accumulated elapsed time in the profiler."""return f'Elapsed time is {self.t} s'def time(self):"""Get current time."""if self.cuda:torch.cuda.synchronize()return time.time()def segment2box(segment, width=640, height=640):"""Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy).Args:segment (torch.Tensor): the segment labelwidth (int): the width of the image. Defaults to 640height (int): The height of the image. Defaults to 640Returns:(np.ndarray): the minimum and maximum x and y values of the segment."""# Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)x, y = segment.T # segment xyinside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)x, y, = x[inside], y[inside]return np.array([x.min(), y.min(), x.max(), y.max()], dtype=segment.dtype) if any(x) else np.zeros(4, dtype=segment.dtype) # xyxydef scale_boxes(img1_shape, boxes, img0_shape, ratio_pad=None, padding=True):"""Rescales bounding boxes (in the format of xyxy) from the shape of the image they were originally specified in(img1_shape) to the shape of a different image (img0_shape).Args:img1_shape (tuple): The shape of the image that the bounding boxes are for, in the format of (height, width).boxes (torch.Tensor): the bounding boxes of the objects in the image, in the format of (x1, y1, x2, y2)img0_shape (tuple): the shape of the target image, in the format of (height, width).ratio_pad (tuple): a tuple of (ratio, pad) for scaling the boxes. If not provided, the ratio and pad will becalculated based on the size difference between the two images.padding (bool): If True, assuming the boxes is based on image augmented by yolo style. If False then do regularrescaling.Returns:boxes (torch.Tensor): The scaled bounding boxes, in the format of (x1, y1, x2, y2)"""if ratio_pad is None: # calculate from img0_shapegain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / newpad = round((img1_shape[1] - img0_shape[1] * gain) / 2 - 0.1), round((img1_shape[0] - img0_shape[0] * gain) / 2 - 0.1) # wh paddingelse:gain = ratio_pad[0][0]pad = ratio_pad[1]if padding:boxes[..., [0, 2]] -= pad[0] # x paddingboxes[..., [1, 3]] -= pad[1] # y paddingboxes[..., :4] /= gainreturn clip_boxes(boxes, img0_shape)def make_divisible(x, divisor):"""Returns the nearest number that is divisible by the given divisor.Args:x (int): The number to make divisible.divisor (int | torch.Tensor): The divisor.Returns:(int): The nearest number divisible by the divisor."""if isinstance(divisor, torch.Tensor):divisor = int(divisor.max()) # to intreturn math.ceil(x / divisor) * divisor#NMS
def non_max_suppression(prediction,conf_thres=0.25,iou_thres=0.45,classes=None,agnostic=False,multi_label=False,labels=(),max_det=300,nc=0, # number of classes (optional)max_time_img=0.05,max_nms=30000,max_wh=7680,
):"""Perform non-maximum suppression (NMS) on a set of boxes, with support for masks and multiple labels per box.Args:prediction (torch.Tensor): A tensor of shape (batch_size, num_classes + 4 + num_masks, num_boxes)containing the predicted boxes, classes, and masks. The tensor should be in the formatoutput by a model, such as YOLO.conf_thres (float): The confidence threshold below which boxes will be filtered out.Valid values are between 0.0 and 1.0.iou_thres (float): The IoU threshold below which boxes will be filtered out during NMS.Valid values are between 0.0 and 1.0.classes (List[int]): A list of class indices to consider. If None, all classes will be considered.agnostic (bool): If True, the model is agnostic to the number of classes, and allclasses will be considered as one.multi_label (bool): If True, each box may have multiple labels.labels (List[List[Union[int, float, torch.Tensor]]]): A list of lists, where each innerlist contains the apriori labels for a given image. The list should be in the formatoutput by a dataloader, with each label being a tuple of (class_index, x1, y1, x2, y2).max_det (int): The maximum number of boxes to keep after NMS.nc (int, optional): The number of classes output by the model. Any indices after this will be considered masks.max_time_img (float): The maximum time (seconds) for processing one image.max_nms (int): The maximum number of boxes into torchvision.ops.nms().max_wh (int): The maximum box width and height in pixelsReturns:(List[torch.Tensor]): A list of length batch_size, where each element is a tensor ofshape (num_boxes, 6 + num_masks) containing the kept boxes, with columns(x1, y1, x2, y2, confidence, class, mask1, mask2, ...)."""# Checks#先判断设置的置信度和iou阈值是否在0和1之间,如不在,则报错是不符合要求的阈值。assert 0 <= conf_thres <= 1, f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'assert 0 <= iou_thres <= 1, f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'#判读那输入的prediction类型,如果之前没有进行提取,则此处再进行提取,如提取过,则直接跳过。if isinstance(prediction, (list, tuple)): # YOLOv8 model in validation model, output = (inference_out, loss_out)prediction = prediction[0] # select only inference outputbs = prediction.shape[0] # batch sizenc = nc or (prediction.shape[1] - 4) # number of classes 获取类别数目nc,本文是1,其中nm为32是mask的数量nm = prediction.shape[1] - nc - 4mi = 4 + nc # mask start index mi为读取mask开始的位置,即数组前边是框、类别置信度,然后是maskxc = prediction[:, 4:mi].amax(1) > conf_thres# candidates xc为根据置信度分数从结果中筛选结果,即分数大于置信度的为True,小于的为False# Settings# min_wh = 2 # (pixels) minimum box width and heighttime_limit = 0.5 + max_time_img * bs # seconds to quit aftermulti_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)prediction = prediction.transpose(-1, -2) # shape(1,84,6300) to shape(1,6300,84)prediction[..., :4] = xywh2xyxy(prediction[..., :4]) # xywh to xyxyt = time.time()output = [torch.zeros((0, 6 + nm), device=prediction.device)] * bsfor xi, x in enumerate(prediction): # image index, image inference# Apply constraints# x[((x[:, 2:4] < min_wh) | (x[:, 2:4] > max_wh)).any(1), 4] = 0 # width-heightx = x[xc[xi]] # confidence# Cat apriori labels if autolabellingif labels and len(labels[xi]):lb = labels[xi]v = torch.zeros((len(lb), nc + nm + 4), device=x.device)v[:, :4] = xywh2xyxy(lb[:, 1:5]) # boxv[range(len(lb)), lb[:, 0].long() + 4] = 1.0 # clsx = torch.cat((x, v), 0)# If none remain process next imageif not x.shape[0]:continue# Detections matrix nx6 (xyxy, conf, cls)box, cls, mask = x.split((4, nc, nm), 1)if multi_label:i, j = torch.where(cls > conf_thres)x = torch.cat((box[i], x[i, 4 + j, None], j[:, None].float(), mask[i]), 1)else: # best class onlyconf, j = cls.max(1, keepdim=True)x = torch.cat((box, conf, j.float(), mask), 1)[conf.view(-1) > conf_thres]# Filter by classif classes is not None:x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]# Check shapen = x.shape[0] # number of boxesif not n: # no boxescontinueif n > max_nms: # excess boxesx = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence and remove excess boxes# Batched NMSc = x[:, 5:6] * (0 if agnostic else max_wh) # classesboxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scoresi = torchvision.ops.nms(boxes, scores, iou_thres) # NMSi = i[:max_det] # limit detections# # Experimental# merge = False # use merge-NMS# if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)# # Update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)# from .metrics import box_iou# iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix# weights = iou * scores[None] # box weights# x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes# redundant = True # require redundant detections# if redundant:# i = i[iou.sum(1) > 1] # require redundancyoutput[xi] = x[i]if (time.time() - t) > time_limit:print(f'WARNING ⚠️ NMS time limit {time_limit:.3f}s exceeded')break # time limit exceeded"""到此处,此幅图像经过了置信度阈值判断和非极大值抑制处理,确定了图像中的目标类别、分数和框的位置。"""return outputdef clip_boxes(boxes, shape):"""Takes a list of bounding boxes and a shape (height, width) and clips the bounding boxes to the shape.Args:boxes (torch.Tensor): the bounding boxes to clipshape (tuple): the shape of the imageReturns:(torch.Tensor | numpy.ndarray): Clipped boxes"""if isinstance(boxes, torch.Tensor): # faster individually (WARNING: inplace .clamp_() Apple MPS bug)boxes[..., 0] = boxes[..., 0].clamp(0, shape[1]) # x1boxes[..., 1] = boxes[..., 1].clamp(0, shape[0]) # y1boxes[..., 2] = boxes[..., 2].clamp(0, shape[1]) # x2boxes[..., 3] = boxes[..., 3].clamp(0, shape[0]) # y2else: # np.array (faster grouped)boxes[..., [0, 2]] = boxes[..., [0, 2]].clip(0, shape[1]) # x1, x2boxes[..., [1, 3]] = boxes[..., [1, 3]].clip(0, shape[0]) # y1, y2return boxesdef clip_coords(coords, shape):"""Clip line coordinates to the image boundaries.Args:coords (torch.Tensor | numpy.ndarray): A list of line coordinates.shape (tuple): A tuple of integers representing the size of the image in the format (height, width).Returns:(torch.Tensor | numpy.ndarray): Clipped coordinates"""if isinstance(coords, torch.Tensor): # faster individually (WARNING: inplace .clamp_() Apple MPS bug)coords[..., 0] = coords[..., 0].clamp(0, shape[1]) # xcoords[..., 1] = coords[..., 1].clamp(0, shape[0]) # yelse: # np.array (faster grouped)coords[..., 0] = coords[..., 0].clip(0, shape[1]) # xcoords[..., 1] = coords[..., 1].clip(0, shape[0]) # yreturn coordsdef scale_image(masks, im0_shape, ratio_pad=None):"""Takes a mask, and resizes it to the original image size.Args:masks (np.ndarray): resized and padded masks/images, [h, w, num]/[h, w, 3].im0_shape (tuple): the original image shaperatio_pad (tuple): the ratio of the padding to the original image.Returns:masks (torch.Tensor): The masks that are being returned."""# Rescale coordinates (xyxy) from im1_shape to im0_shapeim1_shape = masks.shapeif im1_shape[:2] == im0_shape[:2]:return masksif ratio_pad is None: # calculate from im0_shapegain = min(im1_shape[0] / im0_shape[0], im1_shape[1] / im0_shape[1]) # gain = old / newpad = (im1_shape[1] - im0_shape[1] * gain) / 2, (im1_shape[0] - im0_shape[0] * gain) / 2 # wh paddingelse:gain = ratio_pad[0][0]pad = ratio_pad[1]top, left = (int(round(pad[1] - 0.1)), int(round(pad[0] - 0.1))) # y, xbottom, right = (int(round(im1_shape[0] - pad[1] + 0.1)), int(round(im1_shape[1] - pad[0] + 0.1)))if len(masks.shape) < 2:raise ValueError(f'"len of masks shape" should be 2 or 3, but got {len(masks.shape)}')masks = masks[top:bottom, left:right]masks = cv2.resize(masks, (im0_shape[1], im0_shape[0]))if len(masks.shape) == 2:masks = masks[:, :, None]return masksdef xyxy2xywh(x):"""Convert bounding box coordinates from (x1, y1, x2, y2) format to (x, y, width, height) format where (x1, y1) is thetop-left corner and (x2, y2) is the bottom-right corner.Args:x (np.ndarray | torch.Tensor): The input bounding box coordinates in (x1, y1, x2, y2) format.Returns:y (np.ndarray | torch.Tensor): The bounding box coordinates in (x, y, width, height) format."""assert x.shape[-1] == 4, f'input shape last dimension expected 4 but input shape is {x.shape}'y = torch.empty_like(x) if isinstance(x, torch.Tensor) else np.empty_like(x) # faster than clone/copyy[..., 0] = (x[..., 0] + x[..., 2]) / 2 # x centery[..., 1] = (x[..., 1] + x[..., 3]) / 2 # y centery[..., 2] = x[..., 2] - x[..., 0] # widthy[..., 3] = x[..., 3] - x[..., 1] # heightreturn ydef xywh2xyxy(x):"""Convert bounding box coordinates from (x, y, width, height) format to (x1, y1, x2, y2) format where (x1, y1) is thetop-left corner and (x2, y2) is the bottom-right corner.Args:x (np.ndarray | torch.Tensor): The input bounding box coordinates in (x, y, width, height) format.Returns:y (np.ndarray | torch.Tensor): The bounding box coordinates in (x1, y1, x2, y2) format."""assert x.shape[-1] == 4, f'input shape last dimension expected 4 but input shape is {x.shape}'y = torch.empty_like(x) if isinstance(x, torch.Tensor) else np.empty_like(x) # faster than clone/copydw = x[..., 2] / 2 # half-widthdh = x[..., 3] / 2 # half-heighty[..., 0] = x[..., 0] - dw # top left xy[..., 1] = x[..., 1] - dh # top left yy[..., 2] = x[..., 0] + dw # bottom right xy[..., 3] = x[..., 1] + dh # bottom right yreturn ydef xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):"""Convert normalized bounding box coordinates to pixel coordinates.Args:x (np.ndarray | torch.Tensor): The bounding box coordinates.w (int): Width of the image. Defaults to 640h (int): Height of the image. Defaults to 640padw (int): Padding width. Defaults to 0padh (int): Padding height. Defaults to 0Returns:y (np.ndarray | torch.Tensor): The coordinates of the bounding box in the format [x1, y1, x2, y2] wherex1,y1 is the top-left corner, x2,y2 is the bottom-right corner of the bounding box."""assert x.shape[-1] == 4, f'input shape last dimension expected 4 but input shape is {x.shape}'y = torch.empty_like(x) if isinstance(x, torch.Tensor) else np.empty_like(x) # faster than clone/copyy[..., 0] = w * (x[..., 0] - x[..., 2] / 2) + padw # top left xy[..., 1] = h * (x[..., 1] - x[..., 3] / 2) + padh # top left yy[..., 2] = w * (x[..., 0] + x[..., 2] / 2) + padw # bottom right xy[..., 3] = h * (x[..., 1] + x[..., 3] / 2) + padh # bottom right yreturn ydef xyxy2xywhn(x, w=640, h=640, clip=False, eps=0.0):"""Convert bounding box coordinates from (x1, y1, x2, y2) format to (x, y, width, height, normalized) format. x, y,width and height are normalized to image dimensions.Args:x (np.ndarray | torch.Tensor): The input bounding box coordinates in (x1, y1, x2, y2) format.w (int): The width of the image. Defaults to 640h (int): The height of the image. Defaults to 640clip (bool): If True, the boxes will be clipped to the image boundaries. Defaults to Falseeps (float): The minimum value of the box's width and height. Defaults to 0.0Returns:y (np.ndarray | torch.Tensor): The bounding box coordinates in (x, y, width, height, normalized) format"""if clip:x = clip_boxes(x, (h - eps, w - eps))assert x.shape[-1] == 4, f'input shape last dimension expected 4 but input shape is {x.shape}'y = torch.empty_like(x) if isinstance(x, torch.Tensor) else np.empty_like(x) # faster than clone/copyy[..., 0] = ((x[..., 0] + x[..., 2]) / 2) / w # x centery[..., 1] = ((x[..., 1] + x[..., 3]) / 2) / h # y centery[..., 2] = (x[..., 2] - x[..., 0]) / w # widthy[..., 3] = (x[..., 3] - x[..., 1]) / h # heightreturn ydef xywh2ltwh(x):"""Convert the bounding box format from [x, y, w, h] to [x1, y1, w, h], where x1, y1 are the top-left coordinates.Args:x (np.ndarray | torch.Tensor): The input tensor with the bounding box coordinates in the xywh formatReturns:y (np.ndarray | torch.Tensor): The bounding box coordinates in the xyltwh format"""y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)y[..., 0] = x[..., 0] - x[..., 2] / 2 # top left xy[..., 1] = x[..., 1] - x[..., 3] / 2 # top left yreturn ydef xyxy2ltwh(x):"""Convert nx4 bounding boxes from [x1, y1, x2, y2] to [x1, y1, w, h], where xy1=top-left, xy2=bottom-right.Args:x (np.ndarray | torch.Tensor): The input tensor with the bounding boxes coordinates in the xyxy formatReturns:y (np.ndarray | torch.Tensor): The bounding box coordinates in the xyltwh format."""y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)y[..., 2] = x[..., 2] - x[..., 0] # widthy[..., 3] = x[..., 3] - x[..., 1] # heightreturn ydef ltwh2xywh(x):"""Convert nx4 boxes from [x1, y1, w, h] to [x, y, w, h] where xy1=top-left, xy=center.Args:x (torch.Tensor): the input tensorReturns:y (np.ndarray | torch.Tensor): The bounding box coordinates in the xywh format."""y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)y[..., 0] = x[..., 0] + x[..., 2] / 2 # center xy[..., 1] = x[..., 1] + x[..., 3] / 2 # center yreturn ydef xyxyxyxy2xywhr(corners):"""Convert batched Oriented Bounding Boxes (OBB) from [xy1, xy2, xy3, xy4] to [xywh, rotation].Args:corners (numpy.ndarray | torch.Tensor): Input corners of shape (n, 8).Returns:(numpy.ndarray | torch.Tensor): Converted data in [cx, cy, w, h, rotation] format of shape (n, 5)."""is_numpy = isinstance(corners, np.ndarray)atan2, sqrt = (np.arctan2, np.sqrt) if is_numpy else (torch.atan2, torch.sqrt)x1, y1, x2, y2, x3, y3, x4, y4 = corners.Tcx = (x1 + x3) / 2cy = (y1 + y3) / 2dx21 = x2 - x1dy21 = y2 - y1w = sqrt(dx21 ** 2 + dy21 ** 2)h = sqrt((x2 - x3) ** 2 + (y2 - y3) ** 2)rotation = atan2(-dy21, dx21)rotation *= 180.0 / math.pi # radians to degreesreturn np.vstack((cx, cy, w, h, rotation)).T if is_numpy else torch.stack((cx, cy, w, h, rotation), dim=1)def xywhr2xyxyxyxy(center):"""Convert batched Oriented Bounding Boxes (OBB) from [xywh, rotation] to [xy1, xy2, xy3, xy4].Args:center (numpy.ndarray | torch.Tensor): Input data in [cx, cy, w, h, rotation] format of shape (n, 5).Returns:(numpy.ndarray | torch.Tensor): Converted corner points of shape (n, 8)."""is_numpy = isinstance(center, np.ndarray)cos, sin = (np.cos, np.sin) if is_numpy else (torch.cos, torch.sin)cx, cy, w, h, rotation = center.Trotation *= math.pi / 180.0 # degrees to radiansdx = w / 2dy = h / 2cos_rot = cos(rotation)sin_rot = sin(rotation)dx_cos_rot = dx * cos_rotdx_sin_rot = dx * sin_rotdy_cos_rot = dy * cos_rotdy_sin_rot = dy * sin_rotx1 = cx - dx_cos_rot - dy_sin_roty1 = cy + dx_sin_rot - dy_cos_rotx2 = cx + dx_cos_rot - dy_sin_roty2 = cy - dx_sin_rot - dy_cos_rotx3 = cx + dx_cos_rot + dy_sin_roty3 = cy - dx_sin_rot + dy_cos_rotx4 = cx - dx_cos_rot + dy_sin_roty4 = cy + dx_sin_rot + dy_cos_rotreturn np.vstack((x1, y1, x2, y2, x3, y3, x4, y4)).T if is_numpy else torch.stack((x1, y1, x2, y2, x3, y3, x4, y4), dim=1)def ltwh2xyxy(x):"""It converts the bounding box from [x1, y1, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right.Args:x (np.ndarray | torch.Tensor): the input imageReturns:y (np.ndarray | torch.Tensor): the xyxy coordinates of the bounding boxes."""y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)y[..., 2] = x[..., 2] + x[..., 0] # widthy[..., 3] = x[..., 3] + x[..., 1] # heightreturn ydef segments2boxes(segments):"""It converts segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)Args:segments (list): list of segments, each segment is a list of points, each point is a list of x, y coordinatesReturns:(np.ndarray): the xywh coordinates of the bounding boxes."""boxes = []for s in segments:x, y = s.T # segment xyboxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxyreturn xyxy2xywh(np.array(boxes)) # cls, xywhdef resample_segments(segments, n=1000):"""Inputs a list of segments (n,2) and returns a list of segments (n,2) up-sampled to n points each.Args:segments (list): a list of (n,2) arrays, where n is the number of points in the segment.n (int): number of points to resample the segment to. Defaults to 1000Returns:segments (list): the resampled segments."""for i, s in enumerate(segments):s = np.concatenate((s, s[0:1, :]), axis=0)x = np.linspace(0, len(s) - 1, n)xp = np.arange(len(s))segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)],dtype=np.float32).reshape(2, -1).T # segment xyreturn segments#裁剪掩码mask 输入的是masks和downsampled_bboxes
def crop_mask(masks, boxes):"""It takes a mask and a bounding box, and returns a mask that is cropped to the bounding box.Args:masks (torch.Tensor): [n, h, w] tensor of masksboxes (torch.Tensor): [n, 4] tensor of bbox coordinates in relative point formReturns:(torch.Tensor): The masks are being cropped to the bounding box.确保masks的值在图像大小范围之内。masks.gt_(0.5)判断masks中的值是否大于0.5,大于则为true。"""n, h, w = masks.shape# print("n, h, w :",masks.shape)#然后对boxes的内容进行拆分,torch.chunk(),拆分为四个,x1, y1, x2, y2x1, y1, x2, y2 = torch.chunk(boxes[:, :, None], 4, 1) # x1 shape(n,1,1)r = torch.arange(w, device=masks.device, dtype=x1.dtype)[None, None, :] # rows shape(1,1,w)c = torch.arange(h, device=masks.device, dtype=x1.dtype)[None, :, None] # cols shape(1,h,1)return masks * ((r >= x1) * (r < x2) * (c >= y1) * (c < y2))def process_mask_upsample(protos, masks_in, bboxes, shape):"""Takes the output of the mask head, and applies the mask to the bounding boxes. This produces masks of higher qualitybut is slower.Args:protos (torch.Tensor): [mask_dim, mask_h, mask_w]masks_in (torch.Tensor): [n, mask_dim], n is number of masks after nmsbboxes (torch.Tensor): [n, 4], n is number of masks after nmsshape (tuple): the size of the input image (h,w)Returns:(torch.Tensor): The upsampled masks."""c, mh, mw = protos.shape # CHWmasks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHWmasks = crop_mask(masks, bboxes) # CHW#判断masks中的值是否大于0.5,大于则为truereturn masks.gt_(0.5)def process_mask(protos, masks_in, bboxes, shape, upsample=False):"""Apply masks to bounding boxes using the output of the mask head.Args:protos (torch.Tensor): A tensor of shape [mask_dim, mask_h, mask_w].masks_in (torch.Tensor): A tensor of shape [n, mask_dim], where n is the number of masks after NMS.bboxes (torch.Tensor): A tensor of shape [n, 4], where n is the number of masks after NMS.shape (tuple): A tuple of integers representing the size of the input image in the format (h, w).upsample (bool): A flag to indicate whether to upsample the mask to the original image size. Default is False.Returns:(torch.Tensor): A binary mask tensor of shape [n, h, w], where n is the number of masks after NMS, and h and ware the height and width of the input image. The mask is applied to the bounding boxes."""c, mh, mw = protos.shape # CHWih, iw = shapemasks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw) # CHWdownsampled_bboxes = bboxes.clone()downsampled_bboxes[:, 0] *= mw / iwdownsampled_bboxes[:, 2] *= mw / iwdownsampled_bboxes[:, 3] *= mh / ihdownsampled_bboxes[:, 1] *= mh / ihmasks = crop_mask(masks, downsampled_bboxes) # CHWif upsample:masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHWreturn masks.gt_(0.5)def process_mask_native(protos, masks_in, bboxes, shape):"""It takes the output of the mask head, and crops it after upsampling to the bounding boxes.Args:protos (torch.Tensor): [mask_dim, mask_h, mask_w]masks_in (torch.Tensor): [n, mask_dim], n is number of masks after nmsbboxes (torch.Tensor): [n, 4], n is number of masks after nmsshape (tuple): the size of the input image (h,w)Returns:masks (torch.Tensor): The returned masks with dimensions [h, w, n]"""c, mh, mw = protos.shape # CHWmasks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)masks = scale_masks(masks[None], shape)[0] # CHWmasks = crop_mask(masks, bboxes) # CHWreturn masks.gt_(0.5)def scale_masks(masks, shape, padding=True):"""Rescale segment masks to shape.Args:masks (torch.Tensor): (N, C, H, W).shape (tuple): Height and width.padding (bool): If True, assuming the boxes is based on image augmented by yolo style. If False then do regularrescaling."""mh, mw = masks.shape[2:]gain = min(mh / shape[0], mw / shape[1]) # gain = old / newpad = [mw - shape[1] * gain, mh - shape[0] * gain] # wh paddingif padding:pad[0] /= 2pad[1] /= 2top, left = (int(round(pad[1] - 0.1)), int(round(pad[0] - 0.1))) if padding else (0, 0) # y, xbottom, right = (int(round(mh - pad[1] + 0.1)), int(round(mw - pad[0] + 0.1)))masks = masks[..., top:bottom, left:right]masks = F.interpolate(masks, shape, mode='bilinear', align_corners=False) # NCHWreturn masksdef scale_coords(img1_shape, coords, img0_shape, ratio_pad=None, normalize=False, padding=True):"""Rescale segment coordinates (xy) from img1_shape to img0_shape.Args:img1_shape (tuple): The shape of the image that the coords are from.coords (torch.Tensor): the coords to be scaled of shape n,2.img0_shape (tuple): the shape of the image that the segmentation is being applied to.ratio_pad (tuple): the ratio of the image size to the padded image size.normalize (bool): If True, the coordinates will be normalized to the range [0, 1]. Defaults to False.padding (bool): If True, assuming the boxes is based on image augmented by yolo style. If False then do regularrescaling.Returns:coords (torch.Tensor): The scaled coordinates."""if ratio_pad is None: # calculate from img0_shapegain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / newpad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh paddingelse:gain = ratio_pad[0][0]pad = ratio_pad[1]if padding:coords[..., 0] -= pad[0] # x paddingcoords[..., 1] -= pad[1] # y paddingcoords[..., 0] /= gaincoords[..., 1] /= gaincoords = clip_coords(coords, img0_shape)if normalize:coords[..., 0] /= img0_shape[1] # widthcoords[..., 1] /= img0_shape[0] # heightreturn coordsdef masks2segments(masks, strategy='largest'):"""It takes a list of masks(n,h,w) and returns a list of segments(n,xy)Args:masks (torch.Tensor): the output of the model, which is a tensor of shape (batch_size, 160, 160)strategy (str): 'concat' or 'largest'. Defaults to largestReturns:segments (List): list of segment masks"""segments = []for x in masks.int().cpu().numpy().astype('uint8'):c = cv2.findContours(x, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[0]if c:if strategy == 'concat': # concatenate all segmentsc = np.concatenate([x.reshape(-1, 2) for x in c])elif strategy == 'largest': # select largest segmentc = np.array(c[np.array([len(x) for x in c]).argmax()]).reshape(-1, 2)else:c = np.zeros((0, 2)) # no segments foundsegments.append(c.astype('float32'))return segmentsdef convert_torch2numpy_batch(batch: torch.Tensor) -> np.ndarray:"""Convert a batch of FP32 torch tensors (0.0-1.0) to a NumPy uint8 array (0-255), changing from BCHW to BHWC layout.Args:batch (torch.Tensor): Input tensor batch of shape (Batch, Channels, Height, Width) and dtype torch.float32.Returns:(np.ndarray): Output NumPy array batch of shape (Batch, Height, Width, Channels) and dtype uint8."""return (batch.permute(0, 2, 3, 1).contiguous() * 255).clamp(0, 255).to(torch.uint8).cpu().numpy()def clean_str(s):"""Cleans a string by replacing special characters with underscore _Args:s (str): a string needing special characters replacedReturns:(str): a string with special characters replaced by an underscore _"""return re.sub(pattern='[|@#!¡·$€%&()=?¿^*;:,¨´><+]', repl='_', string=s)#mask处理
def masks(img,masks, colors, im_gpu, alpha=0.5, retina_masks=False):"""save masks at once.Args:masks (tensor): predicted masks on cuda, shape: [n, h, w]colors (List[List[Int]]): colors for predicted masks, [[r, g, b] * n]im_gpu (tensor): img is in cuda, shape: [3, h, w], range: [0, 1]alpha (float): mask transparency: 0.0 fully transparent, 1.0 opaque"""if len(masks) == 0:img = im_gpu.permute(1, 2, 0).contiguous().cpu().numpy() * 255colors = torch.tensor(colors, device=im_gpu.device, dtype=torch.float32) / 255.0colors = colors[:, None, None] # shape(n,1,1,3)masks = masks.unsqueeze(3) # shape(n,h,w,1)masks_color = masks * (colors * alpha) # shape(n,h,w,3)inv_alph_masks = (1 - masks * alpha).cumprod(0) # shape(n,h,w,1)mcs = (masks_color * inv_alph_masks).sum(0) * 2 # mask color summand shape(n,h,w,3)im_gpu = im_gpu.flip(dims=[0]) # flip channelim_gpu = im_gpu.permute(1, 2, 0).contiguous() # shape(h,w,3)im_gpu = im_gpu * inv_alph_masks[-1] + mcsim_mask = (im_gpu * 255)im_mask_np = im_mask.byte().cpu().numpy()img = im_mask_np if retina_masks else scale_image(im_gpu.shape, im_mask_np, img.shape)其中上面代码中的opt是官方代码,在models/utils/ops.py中,直接拿过来用就行了,以上的推理代码也是参考的训练模型的代码中的models/segments/predict.py函数,最终完成模型的部署。
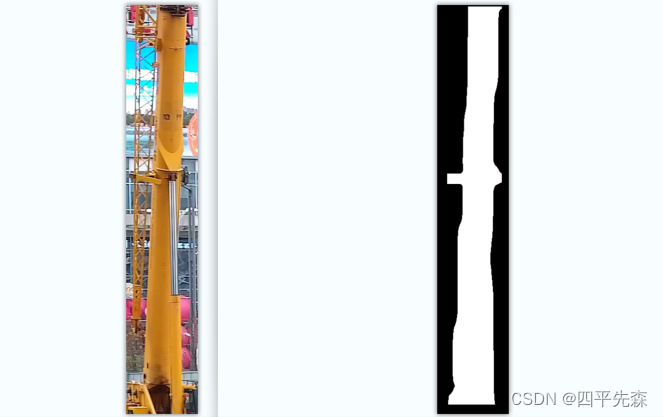
4 测试结果