基于BP算法的SAR成像matlab仿真
目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
4.1 BP算法的基本原理
4.2 BP算法的优点与局限性
5.完整工程文件
1.课题概述
基于BP算法的SAR成像。合成孔径雷达(SAR)是一种高分辨率的雷达系统,能够在各种天气和光照条件下提供地表的高分辨率图像。BP(Back Projection)算法,即后向投影算法,是SAR成像中的一种常用算法,以其高精度和适应性强的特点而广受关注。
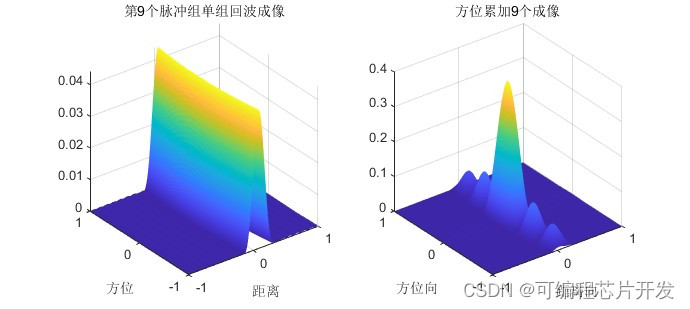
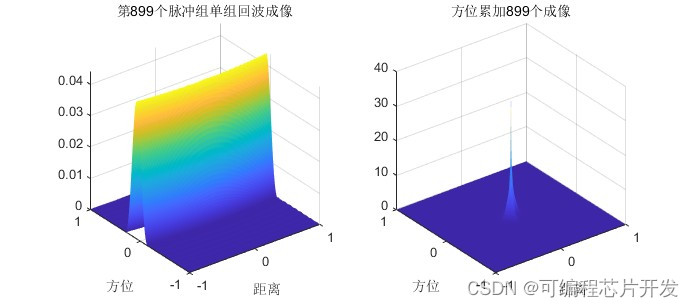
2.系统仿真结果

3.核心程序与模型
版本:MATLAB2022a
..........................................................................
N = 900; % 方位向点数
theta = (1:N)*(90/N); % 方位角范围 Pos_xy = [Rg*cosd(theta); Rg*sind(theta); Height*ones(1,N)]; % 雷达在真实空间中的位置坐标
Target = [0 0 0 1]; % 目标的位置坐标及后向散射系数 %回波数据生成
Secho = func_Echo_gen(Target,Pos_xy,C,Fre,Rc,M,N)%数据处理
data = func_data_process(Secho,R0,Pos_xy,Fre,Rc);
%BP
data = func_BP(data);
fxy = data.im_final;
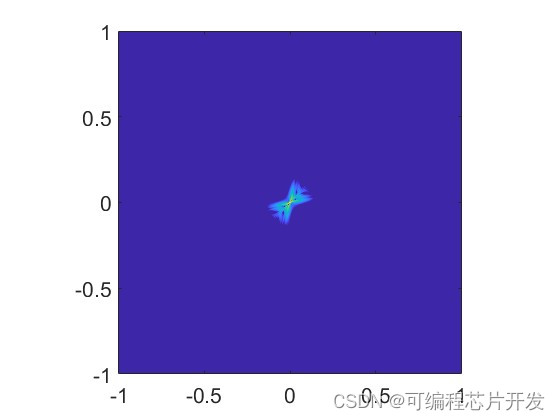
gxy = abs(fxy)/max(abs(fxy(:))); % 为了准确显示点扩散函数剖面,对最终的成像结果做二维插值处理并显示插值后的图像
xtemp1 = linspace(-R0, R0, 4096); % 在距离向上生成更密集的采样点坐标范围
ytemp1 = linspace(-R0, R0, 4096); % 在方位向上生成更密集的采样点坐标范围(此处与xtemp1对称,但实际可能需要根据情况调整)
[Xtemp, Ytemp] = meshgrid(xtemp1, ytemp1); % 生成二维插值所需的网格坐标矩阵(更密集)
[X, Y] = meshgrid(data.xtemp, data.ytemp); % 原始成像结果的网格坐标矩阵(较稀疏)
fxyi = interp2(X, Y, fxy, Xtemp, Ytemp, 'spline'); % 使用样条插值方法对成像结果进行二维插值处理(得到更密集的复数矩阵)
gxyi = abs(fxyi)/max(abs(fxyi(:))); % 计算插值后的归一化幅度矩阵(二维实数矩阵)
dis = 20*log10(gxyi); % 将幅度转换为分贝值表示(dB)并乘以20以转换为电压比的分贝值表示形式(dB相对于最大值)
maxdata = max(dis(:)); % 找到分贝值矩阵中的最大值(用于后续归一化处理)
G = dis - maxdata; % 对分贝值矩阵进行归一化处理(减去最大值以使最大值为0 dB)
G(G < -30) = -30; % 将小于-30 dB的值截断为-30 dB(避免显示过低的噪声水平)
h = figure('Name','目标BP成像效果'); % 创建新窗口并命名(此处与前面的窗口重名了,应该使用不同的名称以区分)
imagesc(xtemp1, ytemp1, G); % 使用imagesc函数显示归一化后的分贝值矩阵图像(以颜色表示幅度大小)
294.系统原理简介
SAR成像的基本原理是利用雷达平台与地表目标之间的相对运动,通过合成孔径技术来模拟一个大孔径的雷达天线,从而获得高分辨率的地表图像。在SAR系统中,雷达发射脉冲信号,并接收来自地表目标的回波信号。通过处理这些回波信号,可以提取出地表目标的散射特性和位置信息。
SAR成像的基本原理是利用雷达平台与目标之间的相对运动形成合成孔径,通过处理回波信号来获取目标的二维图像。SAR系统通过发射射频脉冲并接收来自地面的反射回波,测量回波的时间延迟和相位差异,从而计算出目标与雷达之间的距离和方位信息。
在SAR成像过程中,通常采用距离-多普勒(Range-Doppler)算法或距离-方位(Range-Azimuth)算法。距离-多普勒算法通过在快时间(距离)域和慢时间(方位)域分别进行傅里叶变换(FT)来实现成像。而距离-方位算法则通过在距离域进行FT,然后在方位域进行逆FT(IFT)来成像。
4.1 BP算法的基本原理
BP算法是一种时域成像算法,其基本思想是将雷达接收到的回波信号逐个像素地进行后向投影,从而重建出地表的高分辨率图像。BP算法的实现过程可以分为以下几个步骤:
- 数据预处理:对雷达接收到的原始回波数据进行预处理,包括距离压缩、运动补偿等操作,以消除雷达平台和地表目标之间的相对运动对成像结果的影响。
- 像素网格划分:将成像区域划分为若干个像素网格,每个像素网格代表地表的一个小区域。这些像素网格将作为后向投影的目标位置。
- 后向投影:对于每个像素网格,根据雷达的位置和速度信息,计算雷达与该像素网格之间的距离历程。然后,将雷达接收到的回波信号按照距离历程进行时延和相位补偿,再将其投影到该像素网格上。这一过程可以表示为数学公式:
- 图像重建:通过遍历所有像素网格,重复执行步骤3中的后向投影操作,最终得到整个成像区域的高分辨率图像。
4.2 BP算法的优点与局限性
BP算法作为一种高精度的SAR成像算法,具有以下优点:
- 精度高:BP算法在成像过程中考虑了雷达与地表目标之间的相对运动,能够准确地重建出地表的高分辨率图像。
- 适应性强:BP算法对雷达平台的运动轨迹和地表目标的散射特性没有严格的限制,因此适用于各种复杂的成像场景。
- 算法简单直观:BP算法的实现过程相对简单直观,易于理解和实现。
然而,BP算法也存在一些局限性:
- 计算量大:BP算法需要对每个像素网格进行逐个投影操作,因此计算量较大,成像速度较慢。
- 内存消耗高:由于需要存储大量的回波数据和中间结果,BP算法对内存的需求较高。
5.完整工程文件
v