(三维重建学习)已有位姿放入colmap和3D Gaussian Splatting训练
这里写目录标题
- 一、colmap解算数据放入高斯
- 1. 将稀疏重建的文件放入高斯
- 2. 将稠密重建的文件放入高斯
- 二、vkitti数据放入高斯
一、colmap解算数据放入高斯
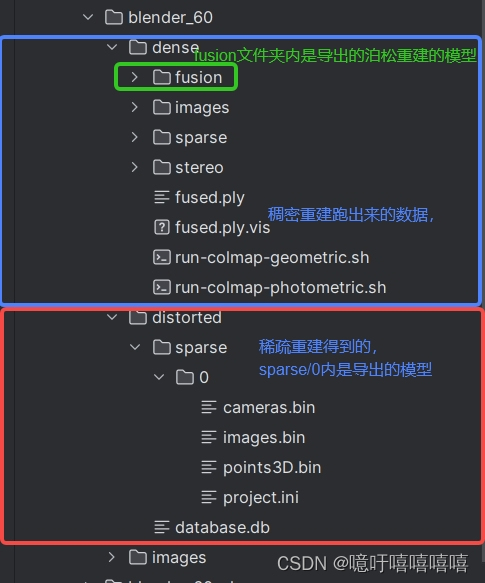
运行Colmap.bat文件之后,进行稀疏重建和稠密重建之后可以得到如下文件结构。
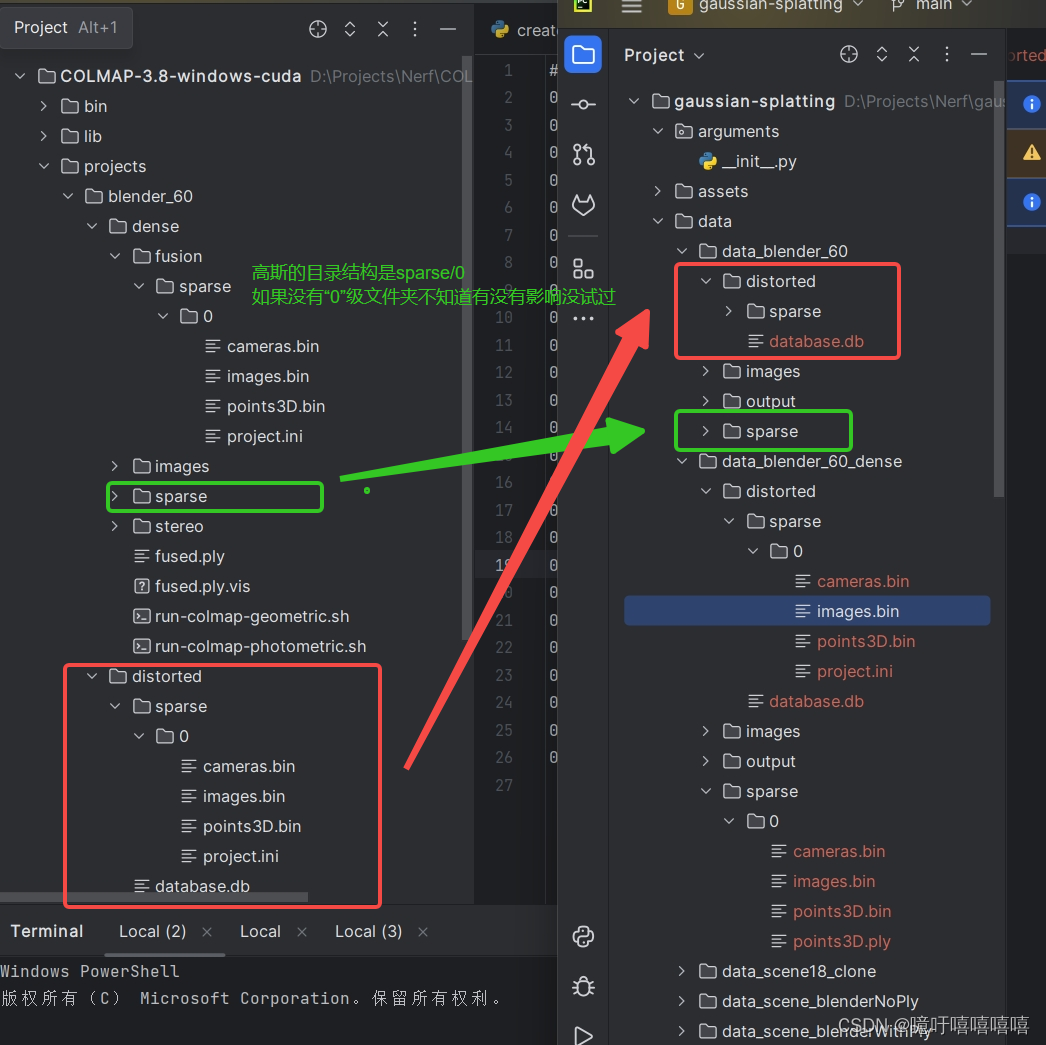
1. 将稀疏重建的文件放入高斯
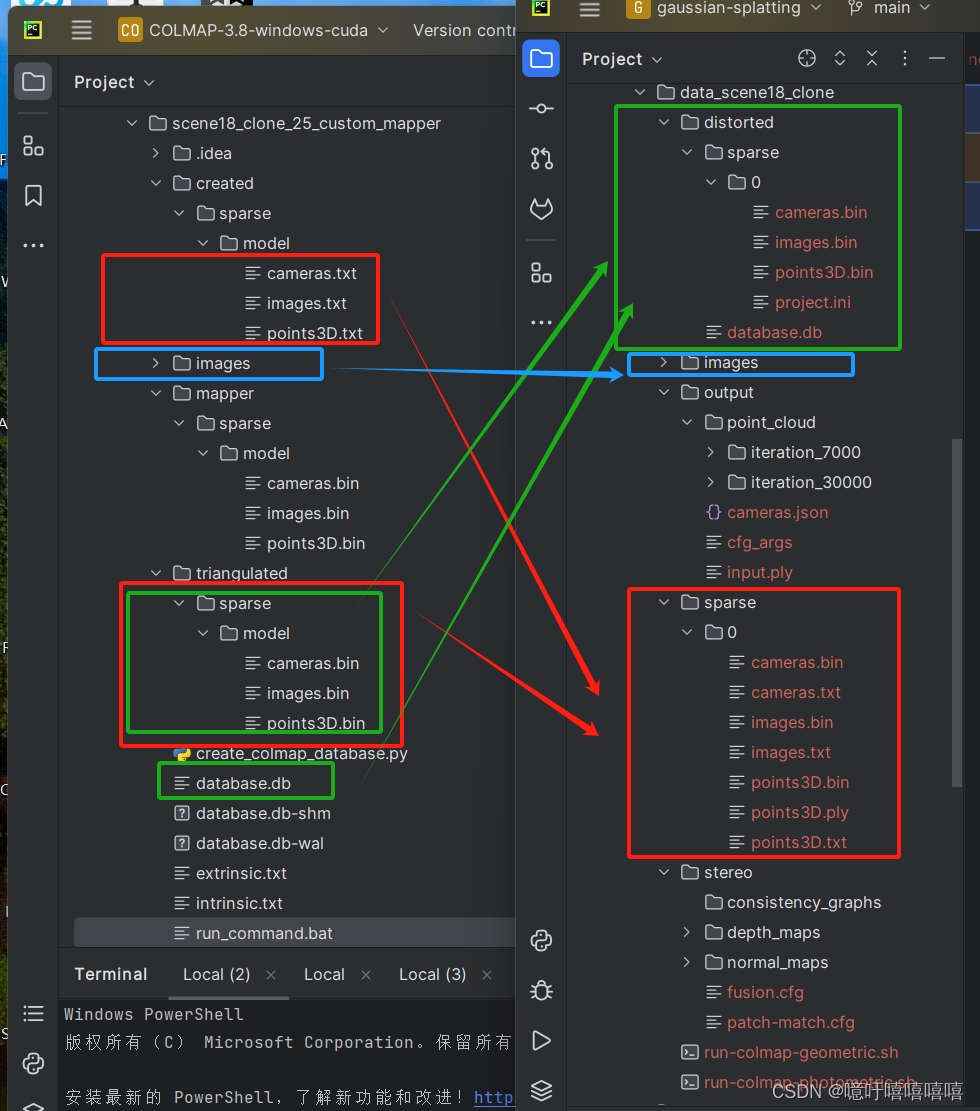
按照以下文件结构将colmap中的数据放入高斯中,就可以执行 python train.py -s data/data_blender_60 -m data/data_blender_60/output 了
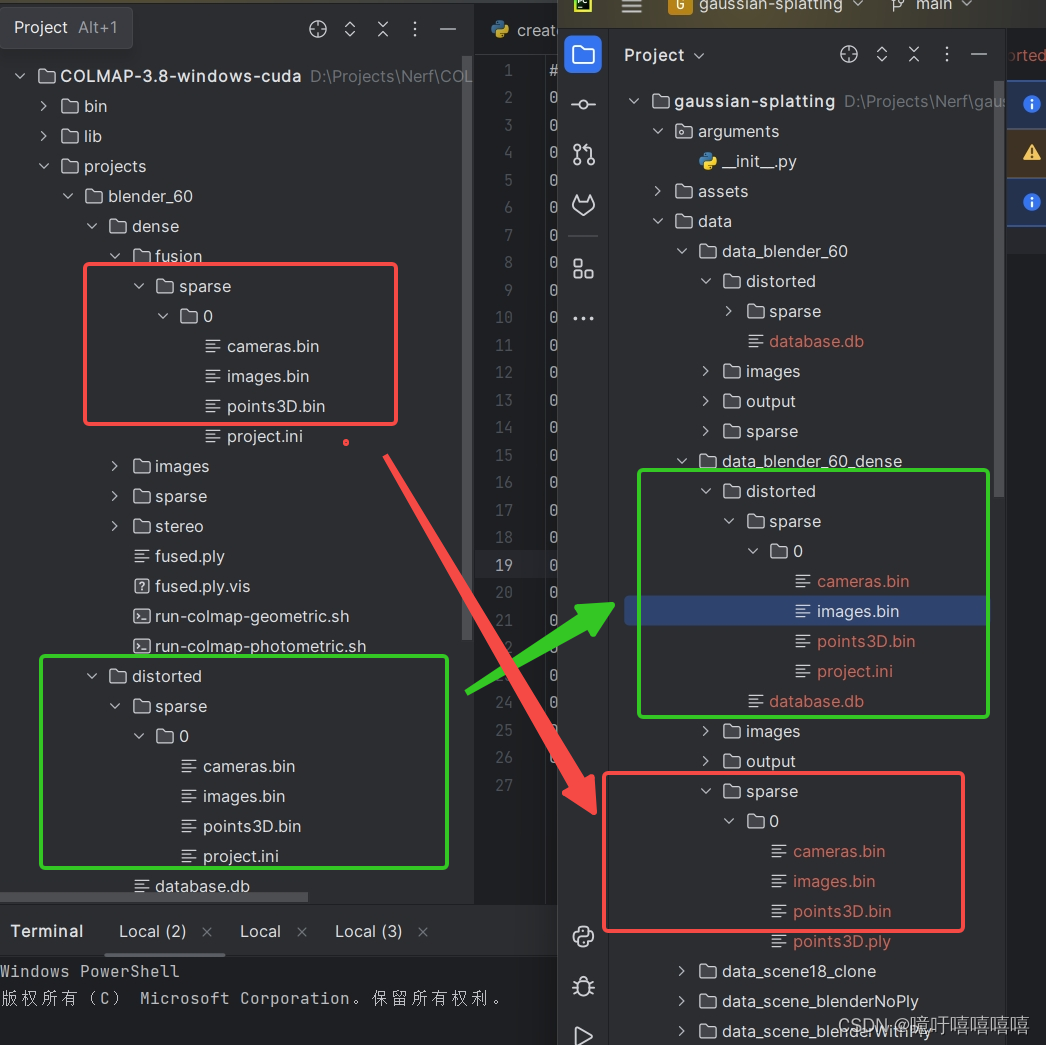
2. 将稠密重建的文件放入高斯
按照以下文件结构将colmap中的数据放入高斯中,
此时若直接运行train文件会有如下报错:
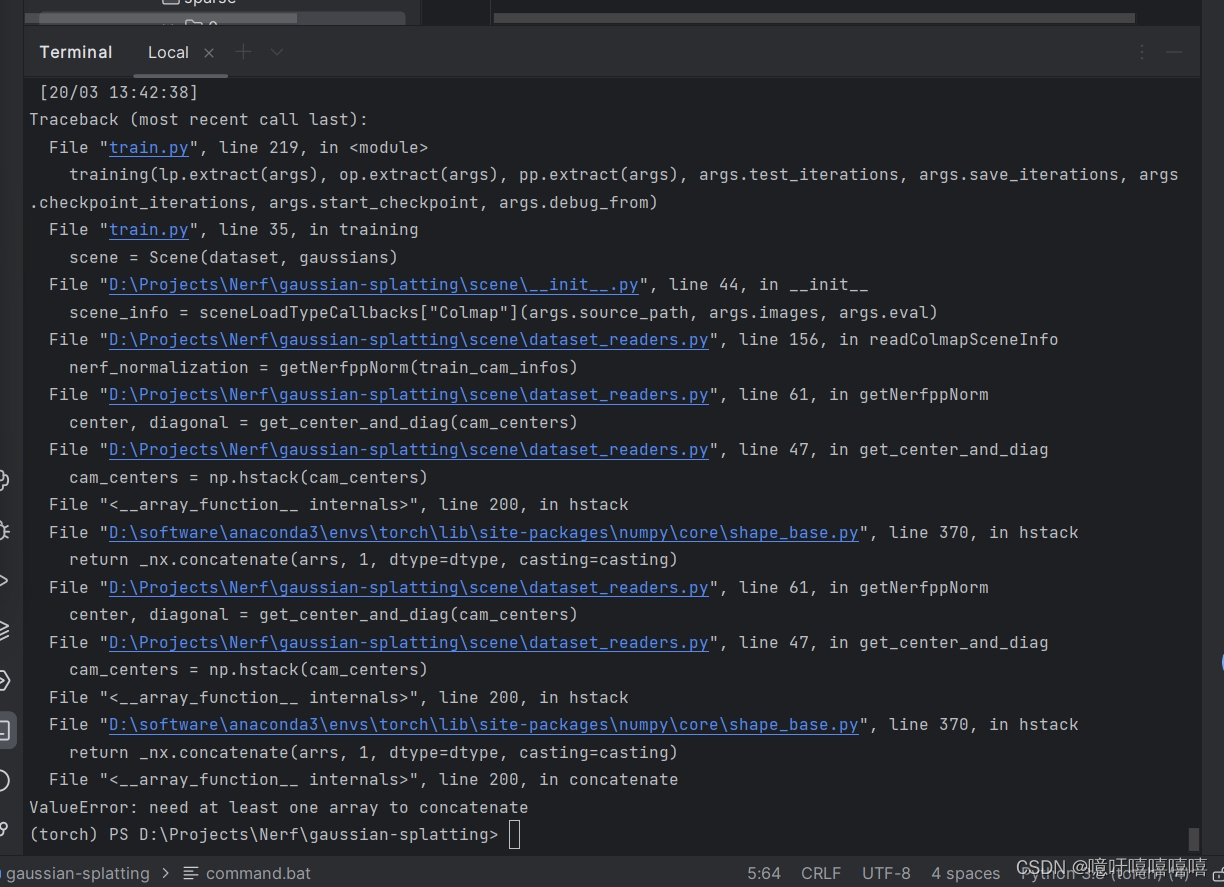
意思是没有获取到cameras,点开sparse/0中的cameras文件,发现全是null,此时,**先删除sparse/0中的cameras.bin和images.bin,再将distorted/sparse/0中的cameras.bin和images.bin文件复制到sparse/0中。**实在不行也可以在colmap中重新导出一下模型。
就可以执行 python train.py -s data/data_blender_60 -m data/data_blender_60/output 了
二、vkitti数据放入高斯
vkitti数据数据格式如下:
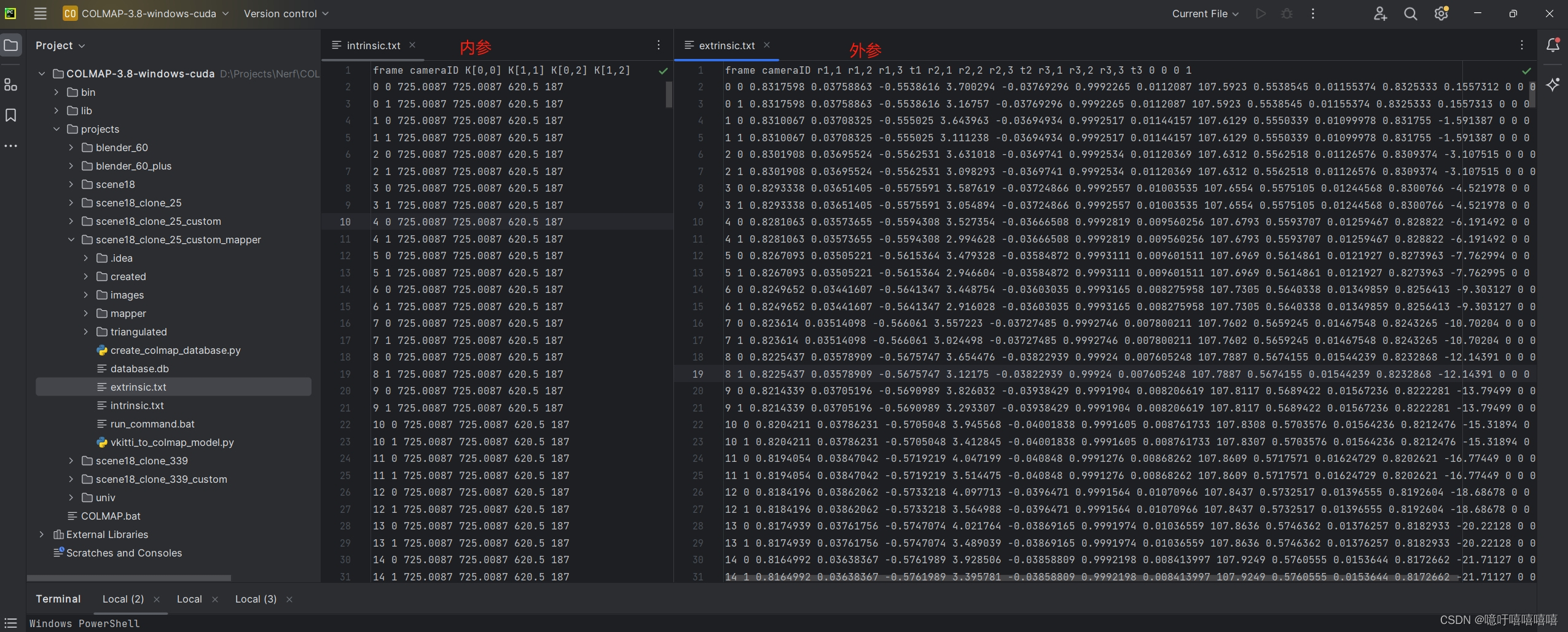
colmap数据数据格式如下(外参数据一定要空一行否则后续不会执行):
最后我的colmap中目录结构如下:
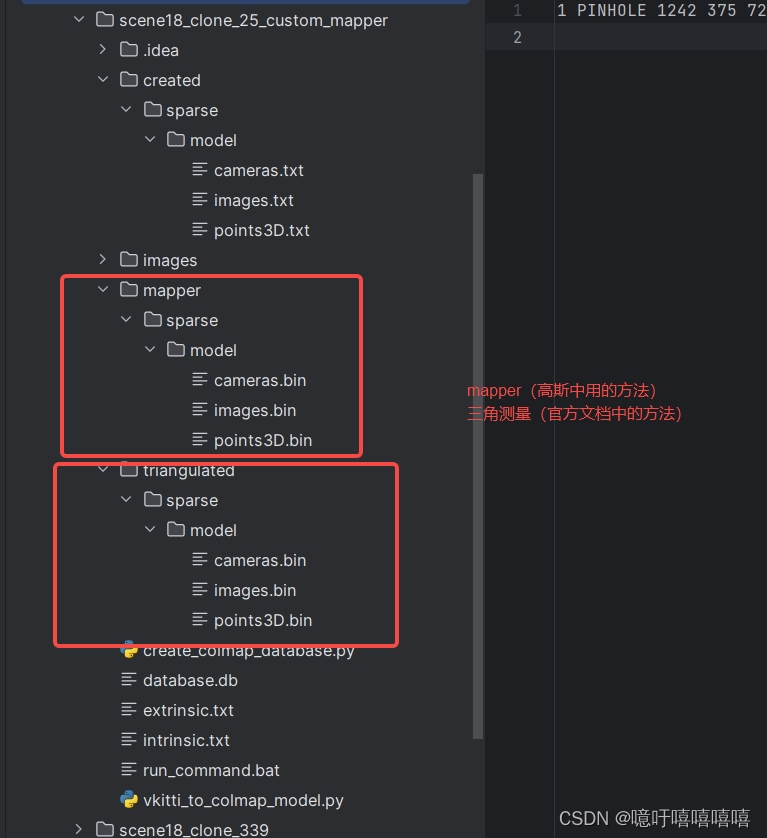
先自行创建以下几个文件夹:执行command.bat
@echo off
if not exist created\sparse\model (mkdir created\sparse\modelecho Created directory: created\sparse\model
)
if not exist triangulated\sparse\model (mkdir triangulated\sparse\modelecho Created directory: triangulated\sparse\model
)
if not exist mapper\sparse\model (mkdir mapper\sparse\modelecho Created directory: mapper\sparse\model
)
接下来开始操作:
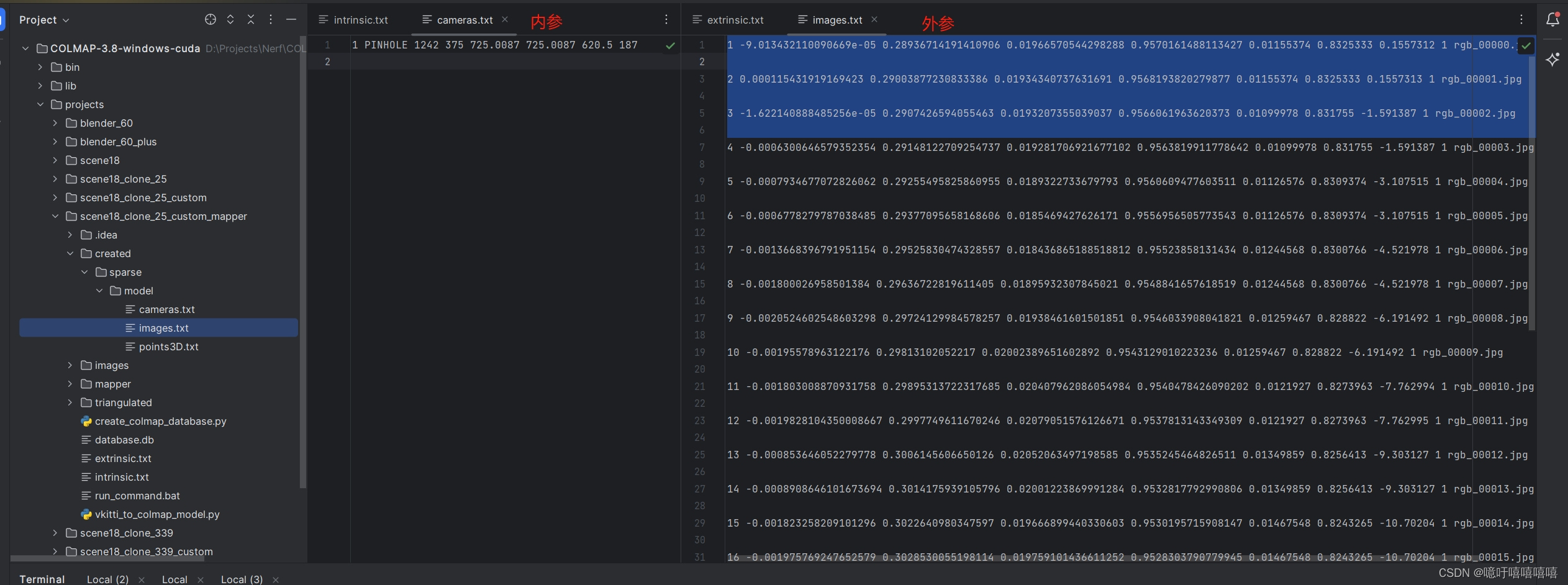
写了一个程序进行格式转换:vkitti_to_colmap_cameras.py
import numpy as np
from scipy.spatial.transform import Rotationindex = 339 #要转换的图片张数def cameras(input_path, output_path):# 定义一个字典用于存储提取的数据data_dict = {'frame': [], 'cameraID': [], 'PARAMS': []}# 打开文件并读取内容with open(input_path, 'r') as file:lines = file.readlines()[1:]# # 删除 camera=1的行# lines = [line for index, line in enumerate(lines) if index % 2 == 0]# 遍历每一行数据for line in lines:# 分割每一行数据elements = line.split()# 提取frame和cameraIDframe = int(elements[0])cameraID = int(elements[1])if cameraID == 1:continue# 提取PARAMSPARAMS = elements[2:6]# 将提取的数据存入字典data_dict['frame'].append(frame)data_dict['cameraID'].append(frame + 1)data_dict['PARAMS'].append(PARAMS)width = 1242height = 375# 将处理后的内容写回文件# 打开文件以写入数据with open(output_path, 'w') as output_file:# 写入文件头部信息output_file.write("# Camera list with one line of data per camera:\n# CAMERA_ID, MODEL, WIDTH, HEIGHT, PARAMS[fx,fy,cx,cy]\n# Number of cameras: 1\n")# 遍历每个数据点for i in range(len(data_dict['frame'])):# 获取相应的数据if data_dict['frame'][i] > index - 1:breakcameraID = data_dict['cameraID'][i]PARAMS = data_dict['PARAMS'][i]fx, fy, cx, cy = PARAMS# 写入数据到文件output_file.write(f"{cameraID} PINHOLE {width} {height} {fx} {fy} {cx} {cy}\n")def images(input_path, output_path):# 定义一个字典用于存储提取的数据data_dict = {'frame': [], 'cameraID': [], 'quaternions': []}# 打开文件并读取内容with open(input_path, 'r') as file:lines = file.readlines()[1:]# 遍历每一行数据for line in lines:# 分割每一行数据elements = line.split()# 提取frame和cameraIDframe = int(elements[0])cameraID = int(elements[1])if cameraID == 1:continue# 提取旋转矩阵部分rotation_matrix = np.array([[float(elements[i]) for i in range(2, 11, 4)],[float(elements[i]) for i in range(3, 12, 4)],[float(elements[i]) for i in range(4, 13, 4)]])# 将旋转矩阵转换为四元数rotation = Rotation.from_matrix(rotation_matrix)quaternion = rotation.as_quat()# 将提取的数据存入字典data_dict['frame'].append(frame)data_dict['cameraID'].append(frame + 1)data_dict['quaternions'].append(quaternion)# 打开文件以写入数据with open(output_path, 'w') as output_file:# 写入文件头部信息output_file.write("# Image list with two lines of data per image:\n# IMAGE_ID, QW, QX, QY, QZ, TX, TY, TZ, CAMERA_ID, NAME\n# POINTS2D[] as (X, Y, POINT3D_ID)\n# Number of images: 339, mean observations per image: 1\n")# 遍历每个数据点for i in range(len(data_dict['frame'])):# 获取相应的数据if data_dict['frame'][i] > index - 1:breakframe = data_dict['frame'][i]cameraID = data_dict['cameraID'][i]quaternion = data_dict['quaternions'][i]# 将四元数和平移向量分开qw, qx, qy, qz = quaterniontx, ty, tz = [float(elem) for elem in lines[i].split()[11:14]]# 写入数据到文件output_file.write(f"{frame + 1} {qw} {qx} {qy} {qz} {tx} {ty} {tz} {cameraID} rgb_{frame:05d}.jpg\n\n")if __name__ == '__main__':input_path = "./intrinsic.txt"output_path = "./cameras.txt"cameras(input_path, output_path)input_path = "./extrinsic.txt"output_path = "./images.txt"images(input_path, output_path)我的同学写了一个创建数据库的代码 ,这将cameras.txt和images.txt文件中的数据都放入database.db中:create_colmap_database.py
# Copyright (c) 2023, ETH Zurich and UNC Chapel Hill.
# All rights reserved.
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions are met:
#
# * Redistributions of source code must retain the above copyright
# notice, this list of conditions and the following disclaimer.
#
# * Redistributions in binary form must reproduce the above copyright
# notice, this list of conditions and the following disclaimer in the
# documentation and/or other materials provided with the distribution.
#
# * Neither the name of ETH Zurich and UNC Chapel Hill nor the names of
# its contributors may be used to endorse or promote products derived
# from this software without specific prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
# AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
# IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
# ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDERS OR CONTRIBUTORS BE
# LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
# CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
# SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
# INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
# CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
# ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
# POSSIBILITY OF SUCH DAMAGE.# This script is based on an original implementation by True Price.import sys
import sqlite3
import numpy as npIS_PYTHON3 = sys.version_info[0] >= 3MAX_IMAGE_ID = 2 ** 31 - 1CREATE_CAMERAS_TABLE = """CREATE TABLE IF NOT EXISTS cameras (camera_id INTEGER PRIMARY KEY AUTOINCREMENT NOT NULL,model INTEGER NOT NULL,width INTEGER NOT NULL,height INTEGER NOT NULL,params BLOB,prior_focal_length INTEGER NOT NULL)"""CREATE_DESCRIPTORS_TABLE = """CREATE TABLE IF NOT EXISTS descriptors (image_id INTEGER PRIMARY KEY NOT NULL,rows INTEGER NOT NULL,cols INTEGER NOT NULL,data BLOB,FOREIGN KEY(image_id) REFERENCES images(image_id) ON DELETE CASCADE)"""CREATE_IMAGES_TABLE = """CREATE TABLE IF NOT EXISTS images (image_id INTEGER PRIMARY KEY AUTOINCREMENT NOT NULL,name TEXT NOT NULL UNIQUE,camera_id INTEGER NOT NULL,prior_qw REAL,prior_qx REAL,prior_qy REAL,prior_qz REAL,prior_tx REAL,prior_ty REAL,prior_tz REAL,CONSTRAINT image_id_check CHECK(image_id >= 0 and image_id < {}),FOREIGN KEY(camera_id) REFERENCES cameras(camera_id))
""".format(MAX_IMAGE_ID
)CREATE_TWO_VIEW_GEOMETRIES_TABLE = """
CREATE TABLE IF NOT EXISTS two_view_geometries (pair_id INTEGER PRIMARY KEY NOT NULL,rows INTEGER NOT NULL,cols INTEGER NOT NULL,data BLOB,config INTEGER NOT NULL,F BLOB,E BLOB,H BLOB,qvec BLOB,tvec BLOB)
"""CREATE_KEYPOINTS_TABLE = """CREATE TABLE IF NOT EXISTS keypoints (image_id INTEGER PRIMARY KEY NOT NULL,rows INTEGER NOT NULL,cols INTEGER NOT NULL,data BLOB,FOREIGN KEY(image_id) REFERENCES images(image_id) ON DELETE CASCADE)
"""CREATE_MATCHES_TABLE = """CREATE TABLE IF NOT EXISTS matches (pair_id INTEGER PRIMARY KEY NOT NULL,rows INTEGER NOT NULL,cols INTEGER NOT NULL,data BLOB)"""CREATE_NAME_INDEX = ("CREATE UNIQUE INDEX IF NOT EXISTS index_name ON images(name)"
)CREATE_ALL = "; ".join([CREATE_CAMERAS_TABLE,CREATE_IMAGES_TABLE,CREATE_KEYPOINTS_TABLE,CREATE_DESCRIPTORS_TABLE,CREATE_MATCHES_TABLE,CREATE_TWO_VIEW_GEOMETRIES_TABLE,CREATE_NAME_INDEX,]
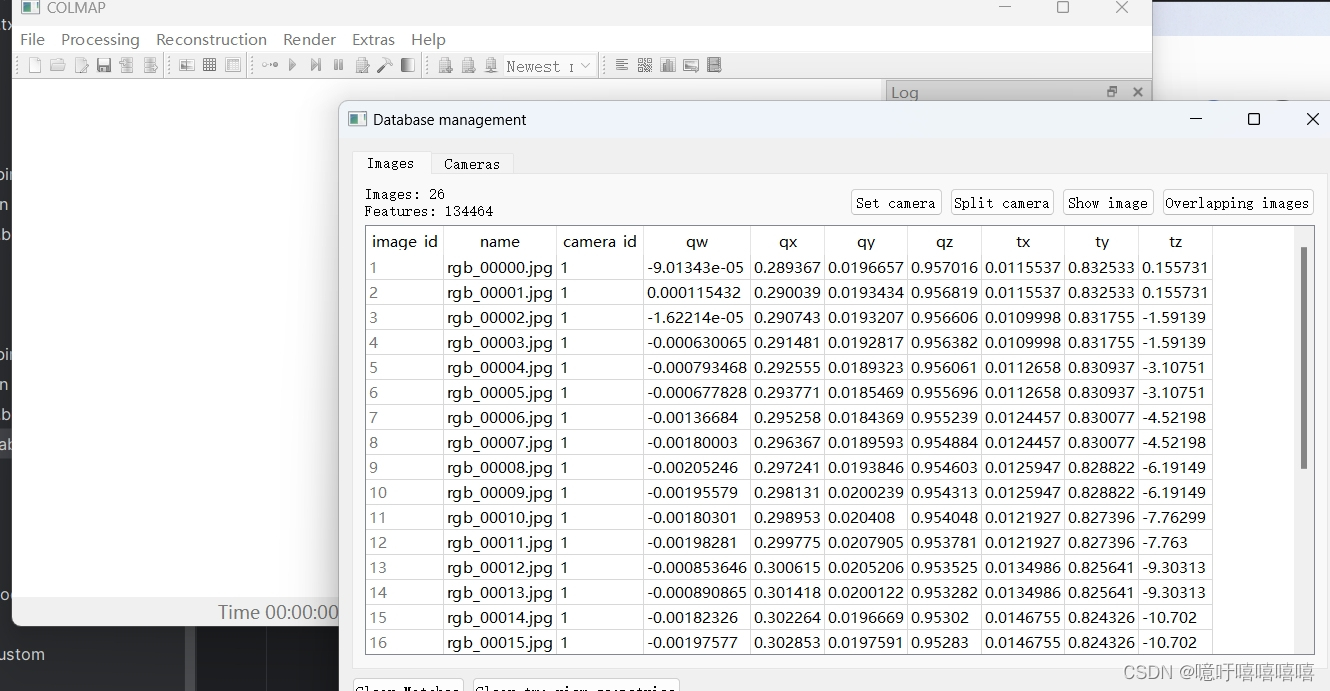
)def image_ids_to_pair_id(image_id1, image_id2):if image_id1 > image_id2:image_id1, image_id2 = image_id2, image_id1return image_id1 * MAX_IMAGE_ID + image_id2def pair_id_to_image_ids(pair_id):image_id2 = pair_id % MAX_IMAGE_IDimage_id1 = (pair_id - image_id2) / MAX_IMAGE_IDreturn image_id1, image_id2def array_to_blob(array):if IS_PYTHON3:return array.tobytes()else:return np.getbuffer(array)def blob_to_array(blob, dtype, shape=(-1,)):if IS_PYTHON3:return np.fromstring(blob, dtype=dtype).reshape(*shape)else:return np.frombuffer(blob, dtype=dtype).reshape(*shape)class COLMAPDatabase(sqlite3.Connection):@staticmethoddef connect(database_path):return sqlite3.connect(database_path, factory=COLMAPDatabase)def __init__(self, *args, **kwargs):super(COLMAPDatabase, self).__init__(*args, **kwargs)self.create_tables = lambda: self.executescript(CREATE_ALL)self.create_cameras_table = lambda: self.executescript(CREATE_CAMERAS_TABLE)self.create_descriptors_table = lambda: self.executescript(CREATE_DESCRIPTORS_TABLE)self.create_images_table = lambda: self.executescript(CREATE_IMAGES_TABLE)self.create_two_view_geometries_table = lambda: self.executescript(CREATE_TWO_VIEW_GEOMETRIES_TABLE)self.create_keypoints_table = lambda: self.executescript(CREATE_KEYPOINTS_TABLE)self.create_matches_table = lambda: self.executescript(CREATE_MATCHES_TABLE)self.create_name_index = lambda: self.executescript(CREATE_NAME_INDEX)def add_camera(self,model,width,height,params,prior_focal_length=False,camera_id=None,):params = np.asarray(params, np.float64)cursor = self.execute("INSERT INTO cameras VALUES (?, ?, ?, ?, ?, ?)",(camera_id,model,width,height,array_to_blob(params),prior_focal_length,),)return cursor.lastrowiddef add_image(self,name,camera_id,prior_q=np.full(4, np.NaN),prior_t=np.full(3, np.NaN),image_id=None,):cursor = self.execute("INSERT INTO images VALUES (?, ?, ?, ?, ?, ?, ?, ?, ?, ?)",(image_id,name,camera_id,prior_q[0],prior_q[1],prior_q[2],prior_q[3],prior_t[0],prior_t[1],prior_t[2],),)return cursor.lastrowiddef add_keypoints(self, image_id, keypoints):assert len(keypoints.shape) == 2assert keypoints.shape[1] in [2, 4, 6]keypoints = np.asarray(keypoints, np.float32)self.execute("INSERT INTO keypoints VALUES (?, ?, ?, ?)",(image_id,) + keypoints.shape + (array_to_blob(keypoints),),)def add_descriptors(self, image_id, descriptors):descriptors = np.ascontiguousarray(descriptors, np.uint8)self.execute("INSERT INTO descriptors VALUES (?, ?, ?, ?)",(image_id,) + descriptors.shape + (array_to_blob(descriptors),),)def add_matches(self, image_id1, image_id2, matches):assert len(matches.shape) == 2assert matches.shape[1] == 2if image_id1 > image_id2:matches = matches[:, ::-1]pair_id = image_ids_to_pair_id(image_id1, image_id2)matches = np.asarray(matches, np.uint32)self.execute("INSERT INTO matches VALUES (?, ?, ?, ?)",(pair_id,) + matches.shape + (array_to_blob(matches),),)def add_two_view_geometry(self,image_id1,image_id2,matches,F=np.eye(3),E=np.eye(3),H=np.eye(3),qvec=np.array([1.0, 0.0, 0.0, 0.0]),tvec=np.zeros(3),config=2,):assert len(matches.shape) == 2assert matches.shape[1] == 2if image_id1 > image_id2:matches = matches[:, ::-1]pair_id = image_ids_to_pair_id(image_id1, image_id2)matches = np.asarray(matches, np.uint32)F = np.asarray(F, dtype=np.float64)E = np.asarray(E, dtype=np.float64)H = np.asarray(H, dtype=np.float64)qvec = np.asarray(qvec, dtype=np.float64)tvec = np.asarray(tvec, dtype=np.float64)self.execute("INSERT INTO two_view_geometries VALUES (?, ?, ?, ?, ?, ?, ?, ?, ?, ?)",(pair_id,)+ matches.shape+ (array_to_blob(matches),config,array_to_blob(F),array_to_blob(E),array_to_blob(H),array_to_blob(qvec),array_to_blob(tvec),),)def example_usage():import osimport argparseparser = argparse.ArgumentParser()parser.add_argument("--database_path", default="database.db")args = parser.parse_args()if os.path.exists(args.database_path):print("ERROR: database path already exists -- will not modify it.")return# Open the database.db = COLMAPDatabase.connect(args.database_path)# For convenience, try creating all the tables upfront.db.create_tables()# Create dummy cameras.model1, width1, height1, params1 = (0,1024,768,np.array((1024.0, 512.0, 384.0)),)model2, width2, height2, params2 = (2,1024,768,np.array((1024.0, 512.0, 384.0, 0.1)),)camera_id1 = db.add_camera(model1, width1, height1, params1)camera_id2 = db.add_camera(model2, width2, height2, params2)# Create dummy images.image_id1 = db.add_image("image1.png", camera_id1)image_id2 = db.add_image("image2.png", camera_id1)image_id3 = db.add_image("image3.png", camera_id2)image_id4 = db.add_image("image4.png", camera_id2)# Create dummy keypoints.## Note that COLMAP supports:# - 2D keypoints: (x, y)# - 4D keypoints: (x, y, theta, scale)# - 6D affine keypoints: (x, y, a_11, a_12, a_21, a_22)num_keypoints = 1000keypoints1 = np.random.rand(num_keypoints, 2) * (width1, height1)keypoints2 = np.random.rand(num_keypoints, 2) * (width1, height1)keypoints3 = np.random.rand(num_keypoints, 2) * (width2, height2)keypoints4 = np.random.rand(num_keypoints, 2) * (width2, height2)db.add_keypoints(image_id1, keypoints1)db.add_keypoints(image_id2, keypoints2)db.add_keypoints(image_id3, keypoints3)db.add_keypoints(image_id4, keypoints4)# Create dummy matches.M = 50matches12 = np.random.randint(num_keypoints, size=(M, 2))matches23 = np.random.randint(num_keypoints, size=(M, 2))matches34 = np.random.randint(num_keypoints, size=(M, 2))db.add_matches(image_id1, image_id2, matches12)db.add_matches(image_id2, image_id3, matches23)db.add_matches(image_id3, image_id4, matches34)# Commit the data to the file.db.commit()# Read and check cameras.rows = db.execute("SELECT * FROM cameras")camera_id, model, width, height, params, prior = next(rows)params = blob_to_array(params, np.float64)assert camera_id == camera_id1assert model == model1 and width == width1 and height == height1assert np.allclose(params, params1)camera_id, model, width, height, params, prior = next(rows)params = blob_to_array(params, np.float64)assert camera_id == camera_id2assert model == model2 and width == width2 and height == height2assert np.allclose(params, params2)# Read and check keypoints.keypoints = dict((image_id, blob_to_array(data, np.float32, (-1, 2)))for image_id, data in db.execute("SELECT image_id, data FROM keypoints"))assert np.allclose(keypoints[image_id1], keypoints1)assert np.allclose(keypoints[image_id2], keypoints2)assert np.allclose(keypoints[image_id3], keypoints3)assert np.allclose(keypoints[image_id4], keypoints4)# Read and check matches.pair_ids = [image_ids_to_pair_id(*pair)for pair in ((image_id1, image_id2),(image_id2, image_id3),(image_id3, image_id4),)]matches = dict((pair_id_to_image_ids(pair_id), blob_to_array(data, np.uint32, (-1, 2)))for pair_id, data in db.execute("SELECT pair_id, data FROM matches"))assert np.all(matches[(image_id1, image_id2)] == matches12)assert np.all(matches[(image_id2, image_id3)] == matches23)assert np.all(matches[(image_id3, image_id4)] == matches34)# Clean up.db.close()if os.path.exists(args.database_path):os.remove(args.database_path)def create_database():import osimport argparseparser = argparse.ArgumentParser()parser.add_argument("--database_path", default="database.db")args = parser.parse_args()# if os.path.exists(args.database_path):# print("ERROR: database path already exists -- will not modify it.")# returnif os.path.exists(args.database_path):os.remove(args.database_path)# if not os.path.exists("distorted"):# os.mkdir("distorted")# Open the database.db = COLMAPDatabase.connect(args.database_path)# For convenience, try creating all the tables upfront.db.create_tables()# Create dummy cameras.camModelDict = {'SIMPLE_PINHOLE': 0,'PINHOLE': 1,'SIMPLE_RADIAL': 2,'RADIAL': 3,'OPENCV': 4,'FULL_OPENCV': 5,'SIMPLE_RADIAL_FISHEYE': 6,'RADIAL_FISHEYE': 7,'OPENCV_FISHEYE': 8,'FOV': 9,'THIN_PRISM_FISHEYE': 10}with open("created/sparse/model/cameras.txt", "r") as cameras_file:cameras_instinct = cameras_file.read().replace("\n", "")passcameras_instinct = cameras_instinct.split(" ")# print(cameras_instinct)model1 = camModelDict[cameras_instinct[1]]width1, height1 = int(cameras_instinct[2]), int(cameras_instinct[3])params1 = np.array([float(param) for param in cameras_instinct[4:]])# print(model1,width1,height1,params1)camera_id1 = db.add_camera(model1, width1, height1, params1)# print(camera_id1)# 图片with open("created/sparse/model/images.txt", "r") as images_file:images_list = images_file.readlines()passfor images_info in images_list:if images_info == "\n":continueimages_info = images_info.replace("\n", "").split(" ")# print(images_info)idx = int(images_info[0])image_name = images_info[-1]# images_info[1]-[4] QW, QX, QY, QZimage_q = np.array([float(q_i) for q_i in images_info[1:5]])# images_info[5]-[7] TX, TY, TZimage_t = np.array([float(t_i) for t_i in images_info[5:8]])image_id_from_db = db.add_image(image_name, camera_id1, prior_q=image_q, prior_t=image_t)if idx != image_id_from_db:print(f"{idx}!={image_id_from_db}")passdb.commit()db.close()if __name__ == "__main__":# example_usage()create_database()运行之后,你可以在colmap中新建项目,导入刚才的database.db文件,查看数据是否被加载进入:
执行:
colmap feature_extractor --database_path database.db --image_path images
colmap exhaustive_matcher --database_path database.db
colmap point_triangulator --database_path database.db --image_path images --input_path created\sparse\model --output_path triangulated\sparse\model
# 或者
colmap mapper --database_path database.db --image_path images --input_path created\sparse\model --output_path mapper\sparse\model
由于我的程序并没有给我 dense/stereo/ 目录下的 patch-match.cfg 等等,于是我自建:
执行程序:generate_fusion&patch_match.py
import numpy as np
import osdef main(folder_path):# 获取文件夹中所有文件名file_names = os.listdir(folder_path)# 写入文件名到txt文件output_file_path = 'patch-match.cfg'with open(output_file_path, 'w') as file:for file_name in file_names:file.write(f"{file_name}\n__auto__, 20\n")output_file_path = 'fusion.cfg'with open(output_file_path, 'w') as file:for file_name in file_names:file.write(f"{file_name}\n")if __name__ == '__main__':folder_path = "images"main(folder_path)将数据移入高斯(我用的三角测量的):
就可以在高斯中执行就 python train.py -s data/data_scene18 -m data/data_scene18 /output 了
但在可视化的时候老是会崩,而且colmap中进行系数重建和稠密重建的效果也不好。中间肯定还是有步骤出错了。