sift算法双向匹配剔除不匹配点_【动手学计算机视觉】第七讲:传统目标检测之SIFT特征...
本讲完整代码>>
前言
提到传统目标识别,就不得不提SIFT算法,Scale-invariant feature transform,中文含义就是尺度不变特征变换。此方法由David Lowe于1999年发表于ICCV(International Conference on Computer Vision),并经过5年的整理和晚上,在2004年发表于IJCV(International journal of computer vision)。由于在此之前的目标检测算法对图片的大小、旋转非常敏感,而SIFT算法是一种基于局部兴趣点的算法,因此不仅对图片大小和旋转不敏感,而且对光照、噪声等影响的抗击能力也非常优秀,因此,该算法在性能和适用范围方面较于之前的算法有着质的改变。这使得该算法对比于之前的算法有着明显的优势,所以,一直以来它都在目标检测和特征提取方向占据着重要的地位,截止2019年6月19日,这篇文章的引用量已经达到51330次(谷歌学术),受欢迎程度可见一斑,本文就详细介绍一下这篇文章的原理,并一步一步编程实现本算法,让各位对这个算法有更清晰的认识和理解。
SIFT
前面提到,SIFT是一个非常经典而且受欢迎的特征描述算法,因此关于这篇文章的学习资料、文章介绍自然非常多。但是很多文章都相当于把原文翻译一遍,花大量篇幅在讲高斯模糊、尺度空间理论、高斯金字塔等内容,容易让人云里雾里,不知道这种算法到底在讲什么?重点又在哪里?
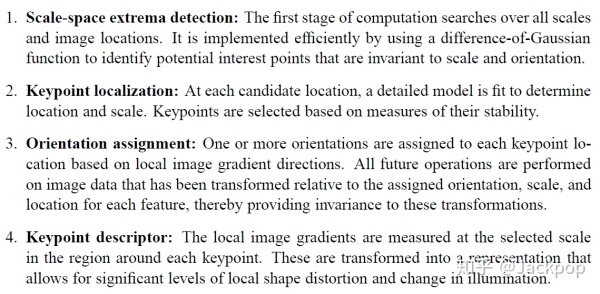
其实下载这篇文章之后打开看一下会发现,SIFT的思想并没有想的那么复杂,它主要包含4个步骤:
- 尺度空间极值检测:通过使用高斯差分函数来计算并搜索所有尺度上的图像位置,用于识别对尺度和方向不变的潜在兴趣点。
- 关键点定位:通过一个拟合精细的模型在每个候选位置上确定位置和尺度,关键点的选择依赖于它们的稳定程度。
- 方向匹配:基于局部图像的梯度方向,为每个关键点位置分配一个或多个方向,后续所有对图像数据的操作都是相对于关键点的方向、尺度和位置进行变换,从而而这些变换提供了不变形。
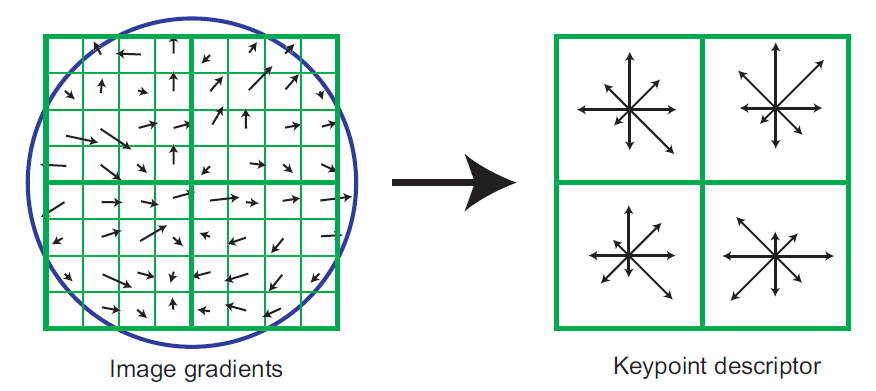
- 关键点描述:这个和HOG算法有点类似之处,在每个关键点周围的区域内以选定的比例计算局部图像梯度,这些梯度被变换成一种表示,这种表示允许比较大的局部形状的变形和光照变化。
由于它将图像数据转换为相对于局部特征的尺度不变坐标,因此这种方法被称为尺度不变特征变换。
如果对这个算法思路进行简化,它就包括2个部分:
- 特征提取
- 特征描述
特征提取
特征点检测主要分为如下两个部分,
- 候选关键点
- 关键点定位
候选关键点
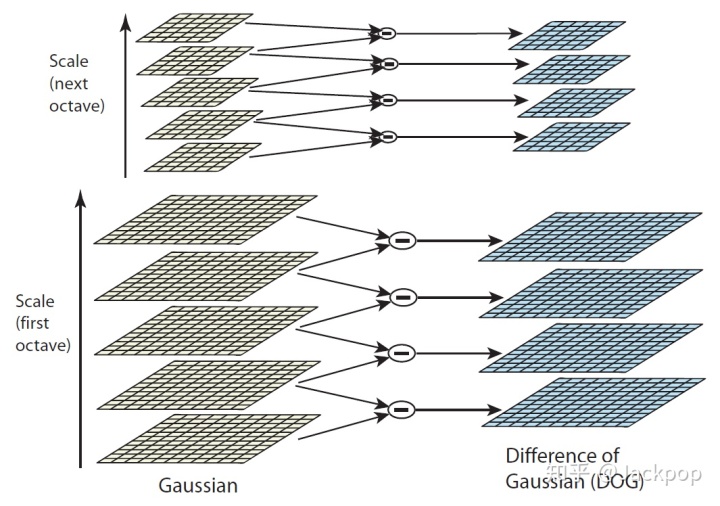
Koenderink(1984)和Lindeberg(1994)已经证明,在各种合理的假设下,高斯函数是唯一可能的尺度空间核。因此,图像的尺度空间被定义为函数,它是由一个可变尺度的高斯核和输入图像生成, 其中高斯核为, 为了有效检测尺度空间中稳定的极点,Lowe于1999年提出在高斯差分函数(DOG)中使用尺度空间极值与图像做卷积,这可以通过由常数乘法因子分隔的两个相邻尺度的差来计算。用公式表示就是, 由于平滑区域临近像素之间变化不大,但是在边、角、点这些特征较丰富的地方变化较大,因此通过DOG比较临近像素可以检测出候选关键点。
关键点定位
检测出候选关键点之后,下一步就是通过拟合惊喜的模型来确定位置和尺度。 2002年Brown提出了一种用3D二次函数来你和局部样本点,来确定最大值的插值位置,实验表明,这使得匹配和稳定性得到了实质的改进。 他的具体方法是对函数进行泰勒展开, 上述的展开式,就是所要的拟合函数。 极值点的偏移量为, 如果偏移量在任何一个维度上大于0.5时,则认为插值中心已经偏移到它的邻近点上,所以需要改变当前关键点的位置,同时在新的位置上重复采用插值直到收敛为止。如果超出预先设定的迭代次数或者超出图像的边界,则删除这个点。
特征描述
前面讲了一些有关特征点检测的内容,但是SIFT实质的内容和价值并不在于特征点的检测,而是特征描述思想,这是它的核心所在,特征点描述主要包括如下两点:
- 方向分配
- 局部特征描述
方向分配
根据图像的图像,可以为每个关键定指定一个基准方向,可以相对于这个指定方向表示关键点的描述符,从而实现了图像的旋转不变性。 关键点的尺度用于选择尺度最接近的高斯平滑图像,使得计算是以尺度不变的方式执行,对每个图像,分别计算它的梯度幅值和梯度方向, 然后,使用方向直方图统计关键点邻域内的梯度幅值和梯度方向。将0~360度划分成36个区间,每个区间为10度,统计得出的直方图峰值代表关键点的主方向。
局部特征描述
通过前面的一系列操作,已经获得每个关键点的位置、尺度、方向,接下来要做的就是用已知特征向量把它描述出来,这是图像特征提取的核心部分。为了避免对光照、视角等因素的敏感性,需要特征描述子不仅仅包含关键点,还要包含它的邻域信息。
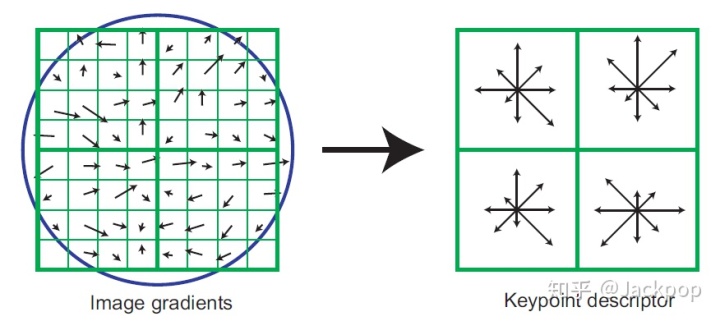
SIFT使用的特征描述子和后面要讲的HOG有很多相似之处。它一检测得到的关键点为中心,选择一个16*16的邻域,然后再把这个邻域再划分为4*4的子区域,然后对梯度方向进行划分成8个区间,这样在每个子区域内疚会得到一个4*4*8=128维的特征向量,向量元素大小为每个梯度方向区间权值。提出得到特征向量后要对邻域的特征向量进行归一化,归一化的方向是计算邻域关键点的主方向,并将邻域旋转至根据主方向旋转至特定方向,这样就使得特征具有旋转不变性。然后再根据邻域内各像素的大小把邻域缩放到指定尺度,进一步使得特征描述子具有尺度不变性。
以上就是SIFT算法的核心部分。
编程实践
本文代码已经放在github,感兴趣的可以自行查看,
https://github.com/jakpopc/aiLearnNotes/blob/master/computer_vision/SIFT.pygithub.com本文实现SIFT特征检测主要基于以下工具包:
- OpenCV
- numpy
其中OpenCV是一个非常知名且受欢迎的跨平台计算机视觉库,它不仅包含常用的图像读取、显示、颜色变换,还包含一些为人熟知的经典特征检测算法,其中就包括SIFT,所以本文使用OpenCV进行读取和SIFT特征检测。 numpy是一个非常优秀的数值计算库,也常用于图像的处理,这里使用numpy主要用于图像的拼接和显示。
导入工具包
import 图像准备
首先写一下读取图像的函数,
def 然后,生成一副对原图进行变换的图像,用于后面特征匹配,本文选择对图像进行垂直镜像变换,
def 显示一下图像变换的结果,
img1 
先用 xfeatures2d 模块实例化一个sift算子,然后使用 detectAndCompute 计算关键点和描述子,随后再用 drawKeypoints 绘出关键点,
# 实例化
显示出检测的关键点为,

关键点已经检测出来,最后一步要做的就是绘出匹配效果,本文用到的是利用 FlannBasedMatcher 来显示匹配效果, 首先要对 FlannBasedMatcher 进行参数设计和实例化,然后用 *knn 对前面计算的出的特征描述子进行匹配,最后利用 drawMatchesKnn 显示匹配效果,
# 参数设计和实例化
检测结果,

完整代码如下,
import 以上就是SIFT的完整内容。
往期回顾
Jackpop:【动手学计算机视觉】第一讲:图像预处理之图像去噪
Jackpop:【动手学计算机视觉】第二讲:图像预处理之图像增强
Jackpop:【动手学计算机视觉】第三讲:图像预处理之图像分割
Jackpop:【动手学计算机视觉】第四讲:图像预处理之图像增广
Jackpop:【动手学计算机视觉】第五讲:传统目标检测之特征工程
Jackpop:【动手学计算机视觉】第六讲:传统目标检测之Harris角点检测