#include "AccelStepper.h"
#define FULLSTEP 4
#define HALFSTEP 8
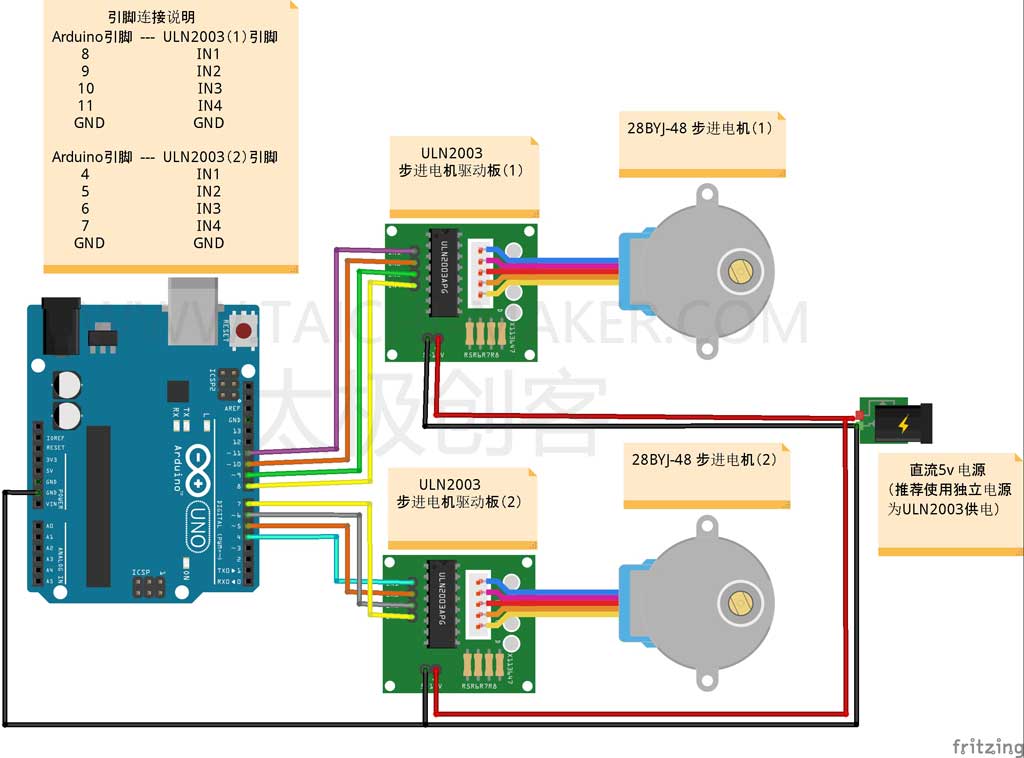
#define motor1Pin1 8
#define motor1Pin2 9
#define motor1Pin3 10
#define motor1Pin4 11
#define motor2Pin1 4
#define motor2Pin2 5
#define motor2Pin3 6
#define motor2Pin4 7
AccelStepper stepper1(HALFSTEP, motor1Pin1, motor1Pin3, motor1Pin2, motor1Pin4);
AccelStepper stepper2(FULLSTEP, motor2Pin1, motor2Pin3, motor2Pin2, motor2Pin4);
void setup() {
stepper1.setMaxSpeed(500.0);
stepper1.setAcceleration(50.0);
stepper2.setMaxSpeed(500.0);
stepper2.setAcceleration(50.0);
}
void loop() {
if ( stepper1.currentPosition() == 0 && stepper2.currentPosition() == 0 ){
stepper1.moveTo(2048);
stepper2.moveTo(2048);
} else if ( stepper1.currentPosition() == 2048 && stepper2.currentPosition() == 2048 ){
stepper1.moveTo(0);
stepper2.moveTo(0);
}
stepper1.run();
stepper2.run();
}