图像条纹检测 python_衍射时差法超声波检测(TOFD)告诉你焊接缺陷到底是什么样的!...


1.什么是衍射时差法
衍射时差法(Time of Flight Diffraction,简称TOFD)是利用缺陷部位的衍射波信号来检测缺陷并测定缺陷尺寸的一种超声检测方法。
检测时,通常使用一对宽声束、宽频带的纵波斜探头,探头相对于焊缝两侧布置,采用一发一收的模式,如图1所示。
该方法最早是由英国原子能管理局国家无损检测中心哈威尔实验室的M·G·Silk根据超声波衍射现象首先提出来的。
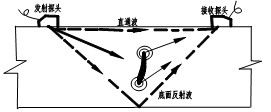
图1 衍射现象
2.衍射时差法的接收信号和图像
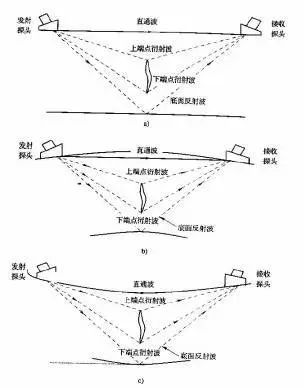
(a) 平板工件 (b) 凸面工件 (c) 凹面工件
图2 不同曲面工件中超声波传播途径
TOFD方法一般将探头对称分布于焊缝两侧,在工件无缺陷的部位,发射超声脉冲后,首先到达接收探头的是直通波,然后是底面反射波。
当工件中存在缺陷时,在直通波和底面反射波之间,接收探头还会接收到缺陷产生的衍射波。
除上述波外,还有缺陷部位和底面因波型转换产生的横波,因横波波速小于纵波,因而一般会迟于底面反射纵波到达接收探头,工件中的超声波传播途径如图2所示。
缺陷处A扫描信号如图3所示。
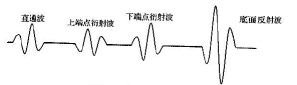
图3 缺陷处A扫描信号
TOFD检测显示包括A扫描信号和TOFD图像,其中A扫描信号使用射频形式,而TOFD图像则是将每个A扫描信号显示一维图像线条,位置与声程相对应,以灰度表示信号幅度,将扫描过程中采集到的连续的A扫描信号形成的图像线条沿探头的运动方向拼接成二维视图,一个轴代表探头移动距离,另一个轴代表扫查面至底面的深度,这样就形成TOFD图像。
从图3所示的A扫描信号中,我们可看到信号的相位变化:直通波与底面反射波的相位是相反的,缺陷的上端点和下端点的衍射波相位也是相反的,而缺陷的下端点与直通波的相位是相同的,缺陷的上端点与底面反射波的相位是相同的。
图4所示为含埋藏缺陷的平板对接焊接接头的检测显示示意图,图中右下方为TOFD图像,右上方为从TOFD图像中缺陷部位提取的一个A扫描信号,其中包括直通波、上端点衍射波、下端点衍射波和底面反射波。
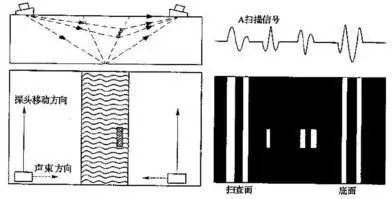
图4 TOFD检测显示示意图(含埋藏缺陷)
3. 缺陷埋藏深度和自身高度的确定
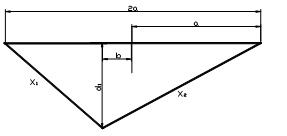
图5 缺陷深度计算图
在平板工件中,为了计算缺陷的深度和自身高度,若设定探头中心间距为2a,缺陷上端点的深度为d1,缺陷距焊缝中心的偏移量为b,如图5所示。
从图5所示的几何关系,有:

式中:c ——声速;
T ——超声波传播的总时间;
t0 ——超声波在探头斜楔中传播的时间
假定缺陷位于焊缝中心线上,此时有:b=0,所得d1最小:

若以直通波为参考起点,并假定b=0,并设缺陷上端点的衍射波与直通波间的传播时间差为Δt,则上式可转化为:

式中:c ——声速;
Δt ——缺陷上端点的衍射波与直通波间的传播时间差;
2a ——探头中心间距。
缺陷下端点与扫查面间的距离用d2表示,同理,可计算出缺陷下端点的深度d2。则缺陷的自身高度(H)为:
H=d2-d1
接下来重点给大家介绍TOFD典型缺陷图谱
3.TOFD典型缺陷图谱
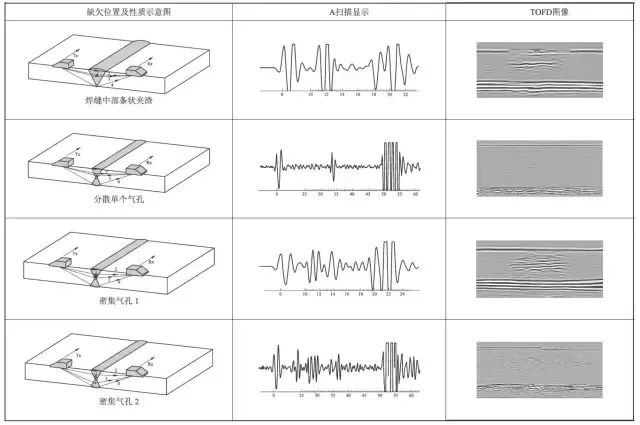
点状缺陷
气孔之类的点状缺陷,在TOFD图像中显示为侧向波和底波信号之间的多周期点(见图1)。
因缺陷高度小于脉冲振铃*距离(通常为2mm-3mm,取决于换能器频率和阻尼),一般显示为单个信号。
点状缺陷通常呈抛物线状,信号朝底面跌落。
注*:
振铃是指探头受电激励截止后产生声波余振动的长短,理想的情况是当施加于探头的电激励脉冲结束后,振动立即停止,但事实上这是无法做到的。
由于它会严重影响超声系统的纵向分辨力,因此希望探头产生余振(振铃)的时间越短越好。
当两个界面距离相隔太近时,若发射脉冲的振铃时间长,则第1个回波的后沿将与第2个回波的前沿混在一起,以致无法分辨产生这2个回波的界面。
脉冲的振铃时间及声速还影响相邻回波的最小可分辨距离。
振铃时间长、声速大,则最小可辨距离大,分辨力就差。
而脉冲的振铃时间的长短又受超声工作率、探头阻尼特性的影响,降低工作频率和加大阻尼均可使振铃减弱,从而使脉冲的时间减小。
激励脉冲宽度也直接影响发射脉冲的振铃时间,彼此之间既相互联系又相互矛盾。
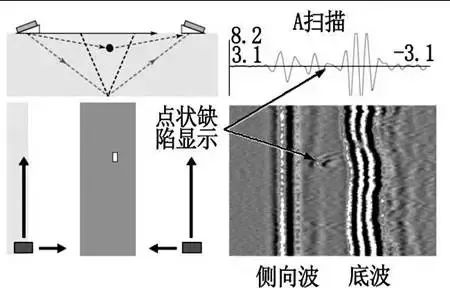
图1点状缺陷TOFD图像
底面开口缺陷
有底面开口缺陷时,侧向波条纹显示不中断(见图2),缺陷信号条纹靠近底面,底波信号条纹有相应中断或开口现象(程度取决于底面开口缺陷尺寸)。
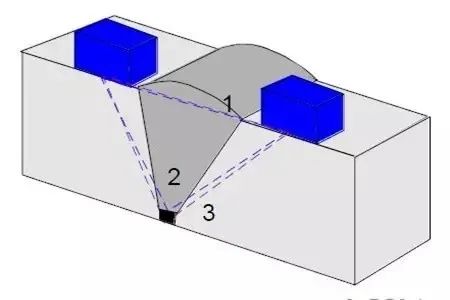
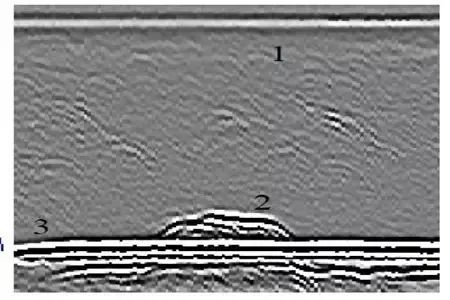
图2 底面开口缺陷TOFD图像
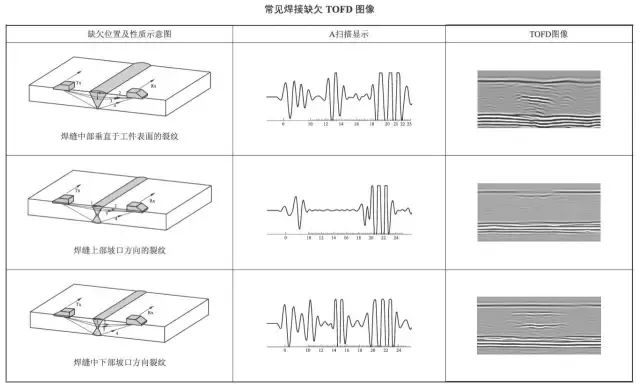
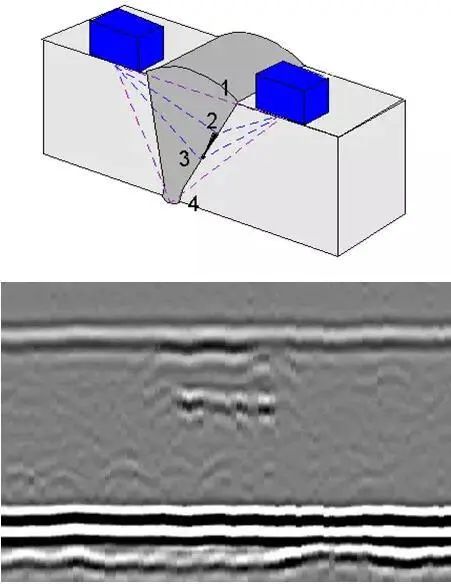
上表面开口缺陷
有上表面开口缺陷时,侧向波条纹会出现扰动现象(见图3)。
缺陷会中断侧向波,因此TOFD图像可用于确定缺陷是否表面开口。
降落的信号条纹则可用于测定缺陷深度。
若缺陷不在表面开口,只是位于近表面,则侧向波也不会中断。
若缺陷位于近表面浅层(即小于侧向波脉冲振铃距离,或2mm-3mm深),则TOFD可能观测不到。
图像也可能显示好多点状缺陷的信号波纹。

图3 表面开口缺陷TOFD图像
壁厚中间缺陷(见图4)
处于壁厚中间的缺陷,其TOFD图像显示完整的侧向波和底波信号波纹,显示缺陷上下端部的衍射信号波纹。
缺陷上端部的回波能很好提供实际缺陷的轮廓。
缺陷上端部信号条纹呈白-黑-白,下端部信号呈黑-白-黑,两者中心间距即为缺陷高度。
另外,在缺陷上端部信号的左右两端,还很容易看到双曲线形态(类似于点状缺陷的效应),因而易于对缺陷准确测长。
若壁厚中间的缺陷在壁厚方向高度较小,即小于换能器脉冲振铃距离(2mm-3mm),则缺陷上下端部信号可能分不开来。
在这种情况下,缺陷上下端部就难以识别,检测人员只能说缺陷高度小于脉冲振铃距离(这取决于换能器频率和阻尼等因素)
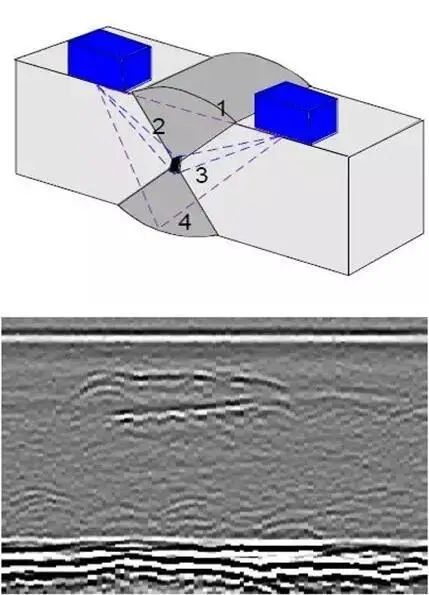
图4 壁厚中间缺陷TOFD图像
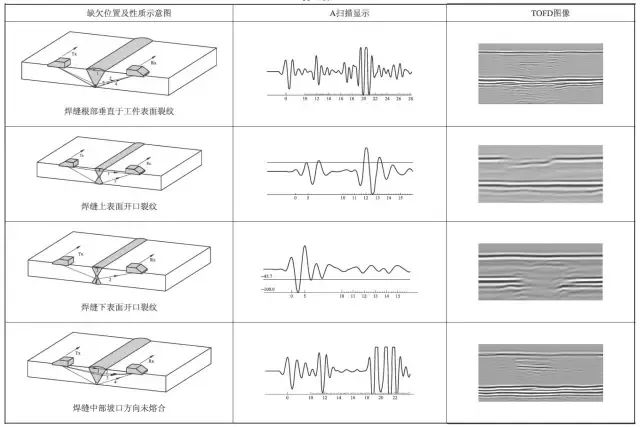
根部未焊透(见图5)
此类缺陷波纹图类似于底面开口缺陷(见图2)。
这种缺陷会给出很强的衍射信号(或更正确地说是反射信号),其相位与底面信号相反,注意无论信号是衍射或反射,对TOFD表征并不重要,缺陷分析和定量还是一样的。
还要注意,即使底面信号波纹有扰动现象,整个缺陷两侧的底面信号波纹仍然可见。
由图可见,该试件材料中还有点状小缺陷和晶粒噪声,这种情况并不罕见。
通常,TOFD会过分突出点状小缺陷,这些小缺陷一般用常规横波脉冲回波法发现不了。
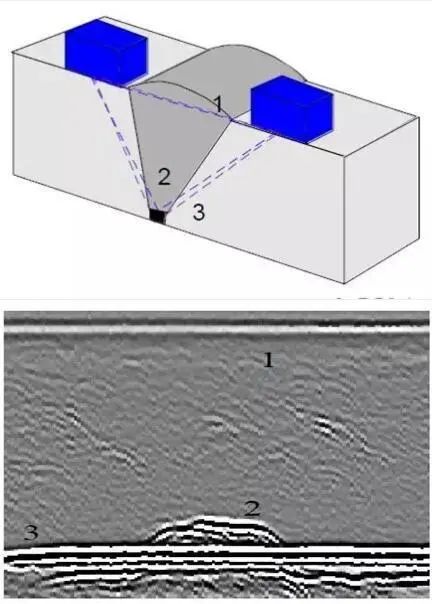
图5根部未焊透TOFD图像
根部内凹(见图6)
此类缺陷波纹图类似于根部未焊透。
在TOFD条纹图中,可见缺陷上端部信号条纹与实际形态相似。底波信号条纹当然有点扰动。
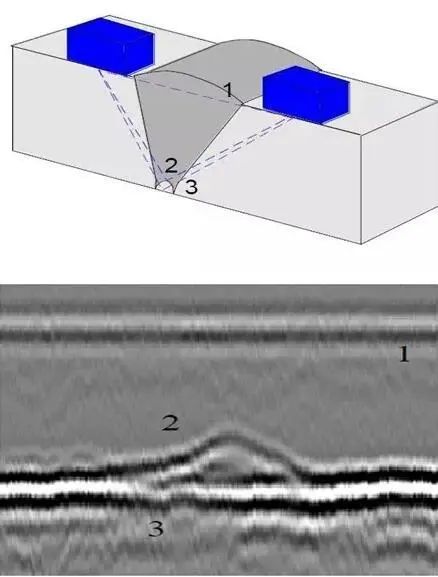
图6 根部内凹TOFD图像
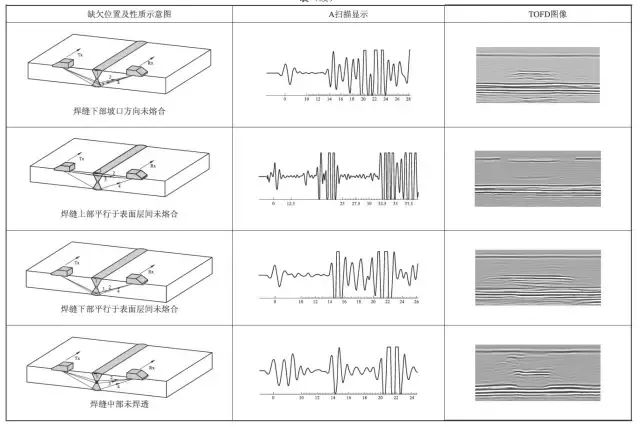
坡口未熔合(见图7)
此类缺陷波纹图类似于壁厚中间的缺陷。但有两点不同:
第一.缺陷沿熔合面倾斜,能有效检出,与方向无关,因而对TOFD来说,不成问题。
第二.若坡口未熔合深度较浅,其上端部信号条纹有可能部分埋在侧向波信号条纹中。
图7示例中,由于侧向波信号幅度明显增大,坡口未熔合上端部信号条纹依然可见。
否则,检测人员很难对该缺陷准确测高。
坡口未熔合位于壁厚中间
图7坡口未熔合TOFD图像
密集气孔(见图8)
此类缺陷波纹图显示一系列幅度不同的双曲线,类似于点状缺陷波纹图的组合。
由于各气孔之间靠得很近,TOFD条纹图上的双曲线重重叠叠,宛若粼粼水波。
对此不可能一一准确评析,但缺陷图像形态独特,可将信号波纹表征为多重点状小缺陷—即密集气孔。
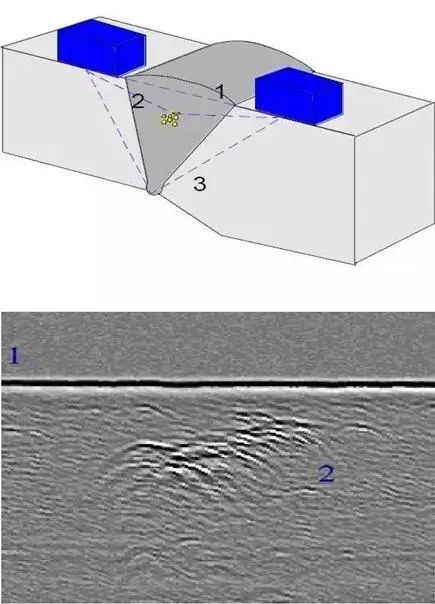
图8 密集气孔TOFD图像
横向裂纹(见图9)
此类缺陷波纹图类似于点状缺陷波纹图。
TOFD纵向扫描显示一组典型的双曲线。
通常用TOFD纵向扫查很难将横向裂纹与近表面气孔的波纹显示区分开来,要明断缺陷性质,一般还要追加精探动作(如将焊缝余高磨平后,令TOFD探头对沿焊缝轴线方向作平行扫查;若焊缝余高不磨平,可令两斜探头声束轴线对焊缝轴线倾斜45°作交叉扫查)。
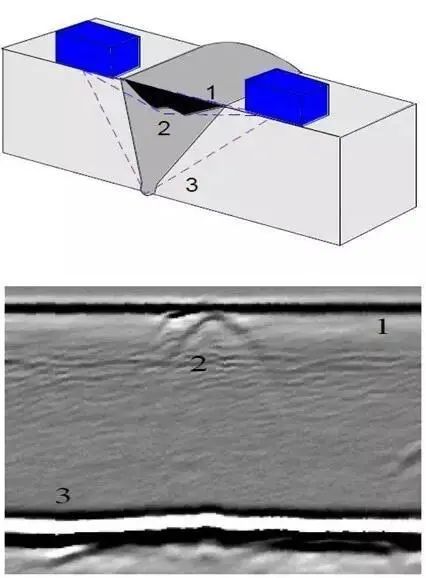
图9 横向裂纹TOFD图像
层间未熔合(见图10)
此类缺陷在壁厚中间区域显示单个强幅度的信号波纹。
若缺陷信号指示长度较大,就很容易与气孔之类的点状源区分开来。
但该种缺陷的上下端部不好区别,因其无此形态特征。
注意层间未熔合与侧向波相位不同。这种缺陷一般是良性的。
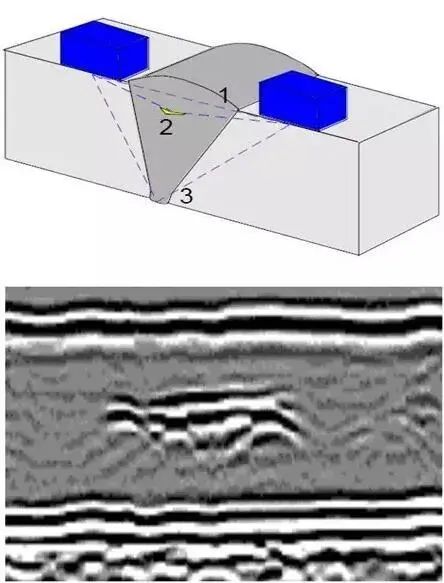
图10 层间未熔合TOFD图像
☞来源:焊潮网整理编辑,如有侵权请联系删除

焊潮网,一个免费发布全国内的企业焊工招聘、个人求职、焊接施工项目信息及焊接技术相关学习资料的平台!
微信号:realweld2018
扫码可加小编微信
