“北斗”知多少?
【日志】
2020/5/23
我想写一篇有关北斗的科普性的博客,将自己学到的东西做点小笔记,顺带分享给大家,嘿嘿。但是,一时间思潮翻涌,竟不知从何处开始写起。先开个草稿,之后萌生灵感再来填坑。
2020/6/23
今天 官宣:我们最后一颗北斗三号组网卫星将于6月23日(今天)9时43分发射。这最后一颗卫星的发射可谓是一波三折:
千呼万唤使出来:
在天空打开太阳翼的瞬间:
我就问一句:帅不帅!
目前文章内容尚待丰富,但为了庆祝最后一颗组网卫星发射成功,决定于当日发布此文。
一、准备工作
1. dB
dB 在后文描述信号强度的时候要用到。dB 是啥?百度百科中这样写道:dB是一个比值,是一个数值,是一个纯计数方法,没有任何单位标注。这样看来的话,有点像 ppm( 1 0 − 6 10^{-6} 10−6)这里只介绍dB 在信号强度领域的含义,其他领域含义详见百度百科或其他专业书籍。(正如弱水三千,吾只取一瓢饮而已…画风突然改变)那么dB 是如何衡量信号强度的呢?下面我们一起看几个例子:
X
=
100000
=
10
∗
l
o
g
(
1
0
5
)
=
50
d
B
X = 100000 = 10*log(10^5) = 50 dB
X=100000=10∗log(105)=50dB
X
=
0.000000000000001
=
10
∗
l
o
g
(
1
0
−
15
)
=
−
150
d
B
X = 0.000000000000001 = 10*log(10^{-15}) = -150 dB
X=0.000000000000001=10∗log(10−15)=−150dB
dBm 定义的是 miliwatt(毫瓦,= 0.001watt)。 0 dBm = 10log(1) mW = 1 mW;
dBw 定义 watt。 0 dBw = 10log1 W = 10*log(1000) mw = 30 dBm。
一般来讲,在工程中,dB和dB之间只有加减,没有乘除。用得最多的是减法。dBm 减 dBm 实际上是两个功率相除,信号功率和噪声功率相除就是信噪比(SNR)。比如:30dBm - 0dBm = 1000mW/1mW = 1000 = 30dB。dBm 加 dBm 实际上是两个功率相乘,没有实际的物理意义。
更详细的介绍:
http://www.360doc.com/content/13/0206/23/3220376_264622875.shtml
2. 卫星种类:
| 缩写 | 全称 | 中文 | 轨道高度 km | 轨道倾角 |
|---|---|---|---|---|
| GEO | Geostationary Earth Orbit | 地球同步静止轨道 | 35786 | - |
| IGSO | Inclined Geosynchronous Orbit | 倾斜地球同步轨道 | 35786 | 55 |
| MEO | Medium Earth Orbit | 中圆地球轨道 | 21528 | 55 |
(1)GEO卫星
北斗卫星导航系统中的GEO卫星是位于赤道上空,在高度为35786km的圆形轨道上运行的卫星。由于其运行角速度与地球自转的角速度
ω
\omega
ω 相同,因而从地面上看这些卫星似乎是固定在空间某一位置不动的, 因而被称为地球静止卫星。GEO卫星的运行周期为1恒星日= 23h56m04s,与地球自转周期相同。由于各种摄动因素的影响,GEO卫星所处的位置会发生较大的偏移,因而需要不断加以调整,这种调整工作被称为“卫星轨道机动”。北斗系统中的GEO卫星平均一个月左右要调整一次轨道。
采用GEO卫星的优点是:
①GEO卫星可长期位于服务区域上空,一天24小时可用,其利用率远高于MEO卫星,而且信号覆盖范围也比MEO卫星的覆盖范围要大得多(一个GEO卫星的信号覆盖范围可达地球总面积的40%左右),且信号强度较为均匀,变化不大。因而特别适用于区域性的卫星导航系统。
②CEO卫星可以方便地同时兼备通信卫星的功能,承担北斗卫星导航系统中的短报文通信功能,以及高精度的双向时间传递等功能。这是因为在服务区域内GEO卫星是长期连续可见的,而IGSO卫星及MEO卫星都只有在部分时间段内可见。实际上北斗卫星就是以东方红-3型通信卫星作为平台的,因而研制难度也相对较小。
③北斗卫星导航系统具有广域差分功能,其中GEO卫星充当了“伪卫星”的角色。它一方面可作为普通的导航卫星来使用,另一方面又承担了向服务区内的用户转发广域差分改正信息的任务,从而将用户的定位误差减少至1m内。
但是从导航定位的角度讲, GEO卫星也存在一些缺点,主要是:
①所有GEO卫星都位于地球赤道平面上,这些卫星与用户之间所组成的几何图形不好,且始终保持不变。这对于导航定位是十分不利的。因而必须用位于倾斜轨道面上的IGSO卫星和MEO卫星来加以弥补。
②信号无法覆盖极区和高纬度地区。
③与MEO卫星相比,CEO卫星离用户的距离更远,在卫星信号发射功率相同的情况下,在地球表面所接收到的GEO卫星的信号比MEO的信号更为微弱,对接收机的性能会提出更高的要求。实际上,在地面上GPS系统中的C/A码的最低信号功率为 -158.5dBw,而与此相仿的北斗卫星公开服务信号 B1I 的最低信号功率为-163dBw。
(2)IGSO卫星
IGSO卫星是位于倾斜轨道面(i≠0)的地球同步卫星。在北斗卫星导航系统中所有的IGSO卫星的轨道倾角i均取55%。IGSO 卫星也在高度为35786km的圆形轨道上运行,其运行周期也为1恒星日。卫星在地球表面上的垂直投影点称为星下点。IGSO 卫星的星下点轨道是一-个阿拉伯数字 “8”,南北对称。星下点的纬度在 ±55° 的范围内变化。与GEO卫星一样,IGSO卫星也具有信号覆盖范围大,且信号强度较为均匀等优点。而且IGSO卫星的信号还能间断性地覆盖南北两极和高纬度地区。合理分布的多个IGSO卫星能与用户间构成较好的几何图形,而且这些图形会不断变化,这对于不同未知参数的相互分离是十分重要的。IGSO 卫星的这些特性可弥补GEO卫星的不足。但一般来说IGSO卫星无法长期连续地停留在用户的视场内,其利用率不如GEO卫星高,而且通常也不能同时承担卫星通信的功能。
(3)MEO卫星
这是一种在中等高度的圆形轨道上运行的卫星。Beidou系统中的MEO卫星的高度为21528km,轨道倾角为55°,相应的运行周期为12h50m。GPS、GLONASS、Galileo 等全球性的卫星导航系统都清一色地采用MEO卫星,这是因为相对而言,MEO卫星的高度、运行周期、信号覆盖面积和信号强度等都较为适中。卫星所受到的摄动力较小,大气阻力可忽略,卫星轨道相对较为稳定,易于进行精密定轨和轨道预报。由于区域性卫星导航系统都有其特定的服务区域(如中国及其周边地区),而MEO卫星只有部分时间出现在服务区上空,其卫星利用率比GEO等卫星低。因而区域性卫星导航系统不会大量使用MEO卫星而更愿意使用GEO、IGSO卫星。但对于全球卫星导航系统来说,MEO卫星仍是一天24小时可用的卫星,只不过是不同时间在为不同地区的用户服务而已。.
二、北斗简介
关于北斗出现的原因及其重要性等可以参看如下文章:
中国北斗卫星导航系统为何令美国恨之入骨?
https://mp.weixin.qq.com/s/D6jQl8bTXlShl6mAfPI5SA
北斗卫星导航系统有多重要?
https://mp.weixin.qq.com/s/FnV-XUHufEtpKYO-nCoGTA
1. 坐标系统
北斗系统采用北斗坐标系( BeiDou Coordinate System,简称BDCS)。北斗坐标系的定义符合国际地球自转服务组织( IERS)规范,与 2000 中国大地坐标系( CGCS2000)定义一致(具有完全相同的参考椭球参数), 具体定义如下:
| 项目 | 描述 |
|---|---|
| 原点 | 地球质心 |
| Z 轴 | 指向 IERS 定义的参考极( IRP)方向 |
| X 轴 | 为 IERS 定义的参考子午面( IRM)与通过原点且同 Z 轴正交的赤道面的交线 |
| Y 轴 | 与 Z、 X 轴构成右手直角坐标系 |
| 长度单位 | 是国际单位制( SI)米 |
| 长半轴 | a=6378137.0 m |
| 地心引力常数(包含大气层) | μ = 3.986004418 × 1 0 14 m 3 / s 2 μ=3.986004418×10^{14} m^3/s^2 μ=3.986004418×1014m3/s2 |
| 扁率 | f=1/298.257222101 |
| 地球自转角速度 | Ω e . = 7.2921150 × 1 0 − 5 r a d / s \mathop{\Omega_e}\limits_{}^. =7.2921150×10^{-5}rad/s Ωe.=7.2921150×10−5rad/s |
CGCS2000与ITRS、WCS-84坐标系的定义是相同的。但是由于在具体实现的过程中所采用的手段不同,所用的观测值和数据处理方法的不同,因而所获得的坐标之间也会有细微的差别,但在cm级的水平上是相互兼容的。
2. 时间系统
北斗卫星导航系统所采用的时间系统为北斗时(BDT)。北斗时采用国际单位制(SI)秒作为基本单位。该时间系统的起始历元为2006年1月1日协调世界时UTC 0h00m00s,连续计时,不跳秒。由于此时 UTC 与协调原子时 TAI 之间已有33s的差异,所以从理论上讲BDT与TAI间总会有33s的差异,即
T
T
A
I
−
T
B
D
T
=
33
s
T_{TAI} - T_{BDT} =33s
TTAI−TBDT=33s
但是TAI与BDT是分别由两组不同的原子钟来建立和维持的,由于原子钟的误差以及数据处理方法的不同,这两种时间系统间除了理论上存在的33s的差异外,还会有微小差异。这些差异可保持在100ns以内。BDT与UTC虽然在BDT的起始历元2006年1月1日0h00m00s保持一致。但是由于UTC存在跳秒,而BDT则不跳秒,因而随着时间的推移这两种时间系统在理论上会存在若千个整秒的差异。相差的整秒数在BDS的导航电文中给出,当然除了上述理论上的整秒差异外,BDT与UTC之间还存在微小差异。其具体数值也可由BDS的导航电文给出,其值可保持在100ns 以内。
GPS系统所用的时间系统GPST的起始时刻为1980年1月6日0h00m00s,在该时刻GPS时与UTC时是相同的。BDT的起始时刻比GPST晚了约26年(差5天)。在此段时间内UTC共跳秒14s,因而GPST与BDT之间理论上也会相差14s,即
T
G
P
S
−
T
B
D
T
=
14
s
T_{GPS} - T_{BDT}= 14s
TGPS−TBDT=14s
同样GPST与BDT是由两组不同的原子钟分别建立和维持的,因而这两种时间系统之间除了理论上的差值14s外,还会存在微小的差异。为了便于用户能同时用GPS与BDS来进行导航定位,在导航定位中也会给出这种微小差异的数值。在北斗系统中时间一般并不用年、月、日、时、分、秒来表示,而是采用星期数WN及本星期内的秒数sow来表示。
3. 信号
信号描述详见下表:
| 项目 | 描述 |
|---|---|
| 载波频率 | 同一颗卫星发射的导航信号的载波频率由共同的基准时钟源产生。 B1I 信号的标称载波频率为 1561.098MHz |
| 调制方式 | B1I 信号采用二进制相移键控( BPSK)调制 |
| 极化方式 | 卫星发射信号为右旋圆极化( RHCP) |
| 载波相位噪声 | 未调制载波的相位噪声谱密度应满足单边噪声带宽为 10Hz 的三阶锁相环的载波跟踪精度达到 0.1 弧度( RMS)。 |
| 信号复用方式 | 信号复用方式为码分多址( CDMA) |
| 信号带宽 | B1I 信号带宽为 4.092 MHz(以 B1I 信号载波频率为中心)。 |
| 杂散 | 卫星发射的杂散信号不超过-50dBc |
这些就有些专业了,目前不是很懂。
4. 服务类型
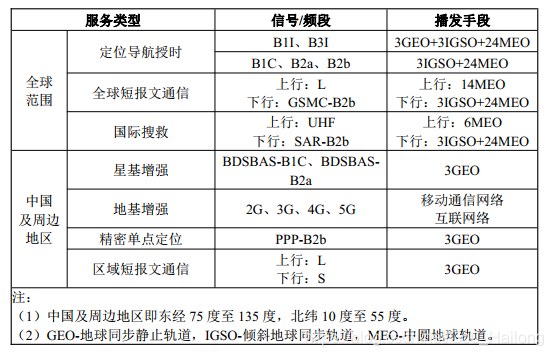
- 定位导航授时服务。为全球用户提供服务,空间信号精度优于0.5米;全球定位精度优于10米,测速精度优于0.2米/秒,授时精度优于20纳秒;亚太地区定位精度优于5米,测速精度优于0.1米/秒,授时精度优于10纳秒,整体性能大幅提升。
- 短报文通信服务。区域短报文通信服务,服务容量提高到1000万次/小时,接收机发射功率降低到1-3瓦,单次通信能力1000 汉字(14000比特);全球短报文通信服务,单次通信能力40汉字(560 比特)。
- 星基增强服务。按照国际民航组织标准,服务中国及周边地区用户,支持单频及双频多星座两种增强服务模式,满足国际民航组织相关性能要求。
- 地基增强服务。利用移动通信网络或互联网络,向北斗基准站网覆盖区内的用户提供米级、分米级、厘米级、毫米级高精度定位服务。
- 精密单点定位服务。服务中国及周边地区用户,提供动态分米级、静态厘米级的精密定位服务。
- 国际搜救服务。 按照国际搜救卫星系统组织相关标准,与其他卫星导航系统共同组成全球中轨搜救系统,服务全球用户。同时提供返向链路,极大提升搜救效率和服务能力。
5. 发射列表

| 卫星 | 发射日期 | 运载火箭 | 轨道 |
|---|---|---|---|
| 第55颗北斗导航卫星 | 2020.6.23 | 长征三号乙 | GEO |
ps:目前最后一颗星还没加上去,我加上先!
图片来源@北斗卫星导航系统:http://www.beidou.gov.cn/
参考/引用 文章
[1] 瞭望智库-微信公众号:https://mp.weixin.qq.com/s/D6jQl8bTXlShl6mAfPI5SA
[2] 政经深读-微信公众号:https://mp.weixin.qq.com/s/FnV-XUHufEtpKYO-nCoGTA
[3] 360图书馆:http://www.360doc.com/content/13/0206/23/3220376_264622875.shtml