28、iNeRF
简介
论文地址:https://arxiv.org/pdf/2012.05877.pdf
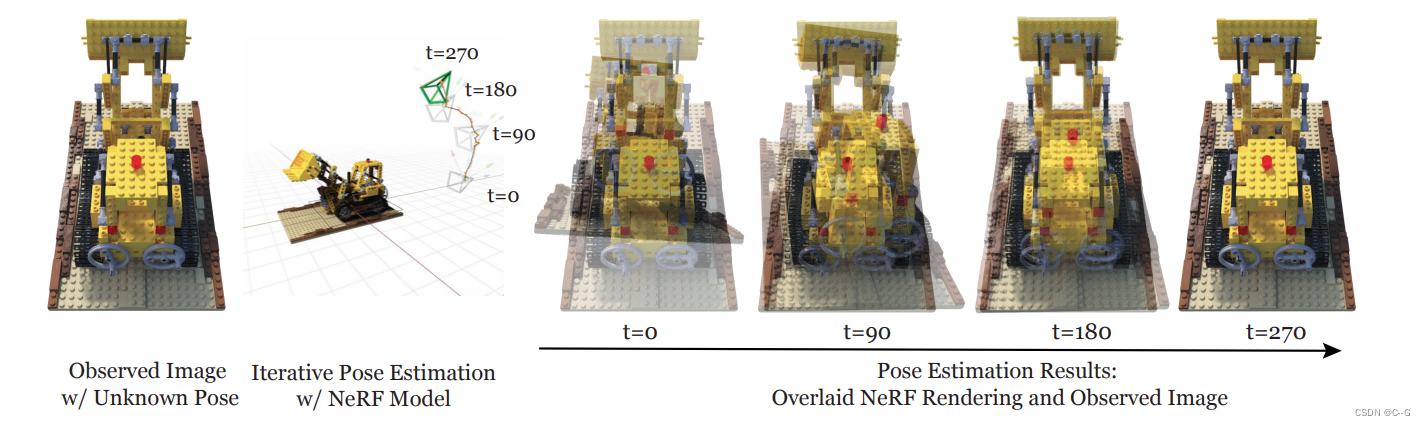
执行无网格的姿态估计,通过反演一个对象或场景的神经辐射场。中间的图为iNeRF迭代姿态估计过程中估计的姿态轨迹(灰色)和地面真实姿态(绿色)。通过比较观察和渲染图像,执行基于梯度的优化来估计相机的姿态,而无需访问对象的网格模型

创新点
- iNeRF可以使用一个NeRF模型来估计具有复杂几何形状的场景和物体的6自由度姿态,而不需要使用3D网格模型或深度感知——只使用RGB图像作为输入
- 对梯度优化的射线采样和批大小进行了彻底的调查,以表征iNeRF的鲁棒性和局限性
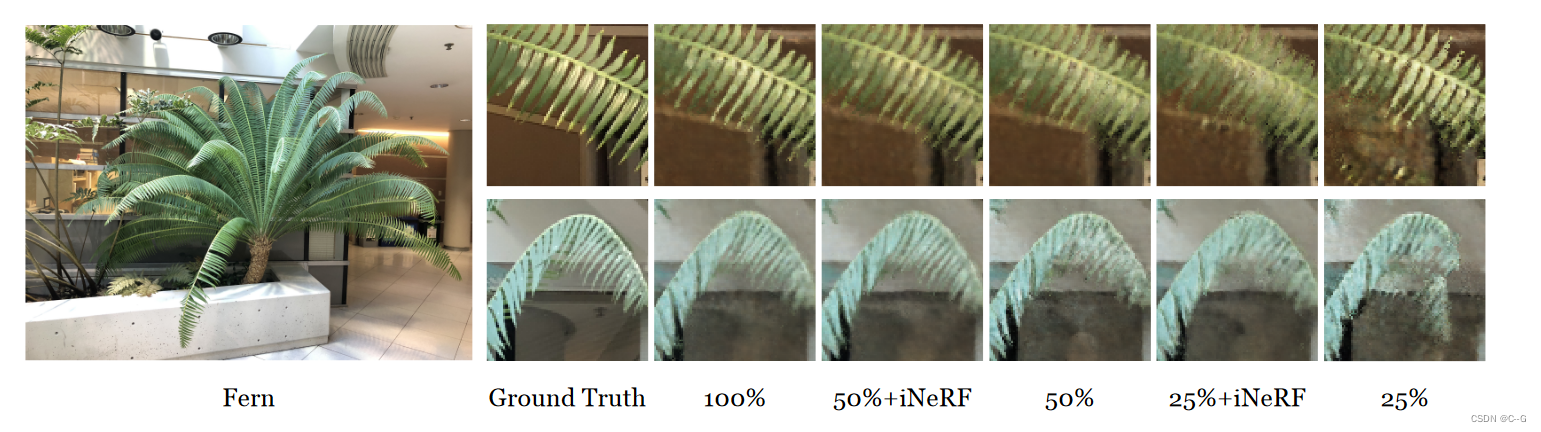
- iNeRF可以通过预测额外图像的相机姿态来改善NeRF,然后可以将这些图像添加到NeRF的训练集中
- iNeRF可以通过预测额外图像的相机姿态来改善NeRF,然后可以将这些图像添加到NeRF的训练集中
实现流程
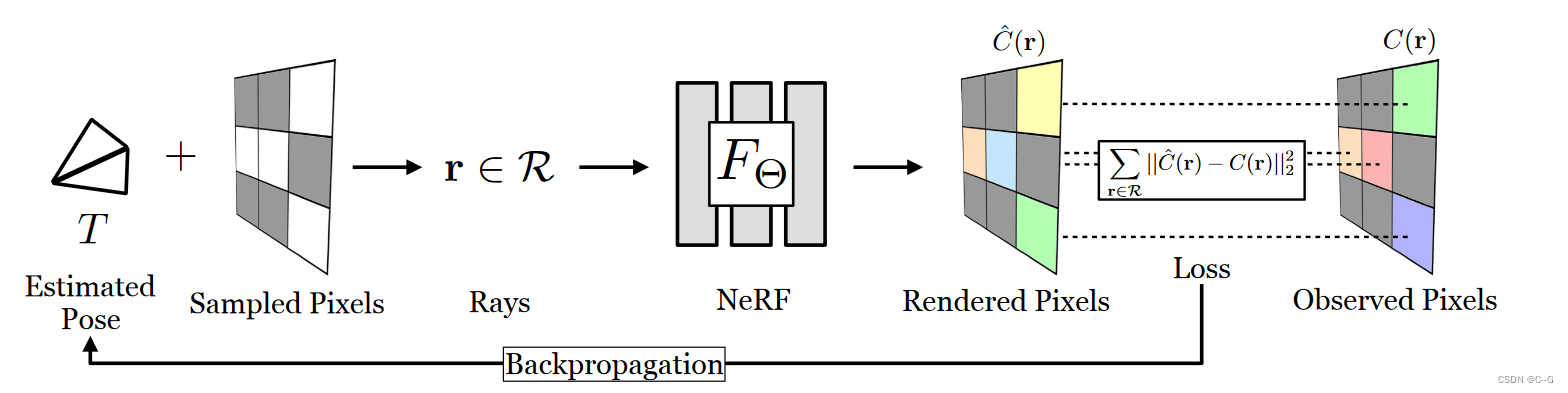
iNeRF是反优化的神经辐射场(NeRF)。给定一个最初估计的姿势,我们首先决定发射哪条射线。沿着光线和相应的观察方向采样的点被送入NeRF的体渲染程序,输出渲染像素。由于整个管道是可微的,我们可以通过最小化渲染和观察像素之间的残差来细化我们的估计姿态。
有了一个训练好的nerf之后,我们注意到颜色积分公式是对坐标可导的。坐标又可以对相机参数进行求导,因此便可以使用nerf渲染得到的图片和目标图片的loss对相机参数进行梯度优化来进行相机姿态估计
Gradient-Based SE(3) Optimization
设Θ是一个训练和固定的NeRF的参数,ˆTi是当前优化步骤i估计的相机姿态,i是观察到的图像,L(ˆTi | i, Θ)是在NeRF中用于训练精细模型的损失,为了确保在基于梯度的优化过程中,估计的姿态ˆTi继续位于SE(3)流形上,我们用指数坐标参数化ˆTi
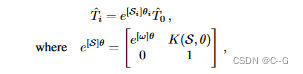
S = [ω, ν]T表示螺旋轴,θ表示幅值,[w]表示w的斜对称3 × 3矩阵,K(S, θ) = (Iθ +(1−cos θ)[ω] + (θ−sin θ)[ω]2)ν[14],目标是解决从初始估计姿态T0的最优相对变换

通过MLP对损失函数进行迭代微分,得到了用于更新估计相对变换的梯度∇SθL(e[S]θT0 | I, Θ),对于每个观测图像,我们在0附近初始化Sθ,其中每个元素从一个零均值正态分布N (0, σ = 10−6)随机绘制
用 e^ [S]θ T0 而不是 T0 e^ [S]θ 参数化会导致旋转中心在初始估计的中心,而不是在相机框架的中心。这就减轻了优化过程中旋转和平移之间的耦合
Sampling Rays
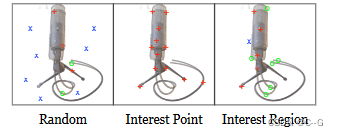
对输入图像和对应于场景估计姿态的渲染进行平均。用x表示背景上的采样像素;+表示被渲染和观察图像覆盖的采样像素;O表示只被渲染或输入图像覆盖的采样像素。当执行随机抽样(左),许多抽样像素是x,这没有提供梯度更新姿态。对于“兴趣点”采样(中间),一些采样像素已经对齐,因此提供的信息很少。对于“感兴趣区域”采样,许多采样像素为o,有助于姿态估计达到更高的精度和更快的收敛速度。

Random Sampling
一个直观的策略是在图像平面上随机采样M个像素位置{pix, piy}^M i=0,并计算它们对应的射线。实际上,NeRF本身在优化Θ时就使用了这种策略(假设不使用图像批处理),当射线b的批大小很小时,这种随机抽样策略的性能是无效的。大多数随机采样像素对应于图像中平坦、无纹理的区域,这些区域提供的姿态信息很少(这与众所周知的孔径问题一致)。
Interest Point Samplin
受图像对齐文献的启发,论文提出兴趣点采样来指导iNeRF优化,其中首先使用兴趣点探测器来定位观察图像中的一组候选像素位置。然后,从检测到的兴趣点中采样M个点,如果没有检测到足够的兴趣点,就返回到随机抽样。虽然由于引入了较少的随机性,这种策略使优化收敛更快,但实验发现,由于它只考虑观察图像上的兴趣点,而不是同时考虑观察图像和渲染图像上的兴趣点,因此容易出现局部最小值。然而,在渲染的图像中获取兴趣点需要O(HW n)次正向MLP传递(H,W图像宽高,n采样点数),因此在优化中使用成本非常高。
Interest Region Sampling
为了防止只从兴趣点采样导致局部最小,论文提出了“兴趣区域”采样,一种放松兴趣点采样的策略,从以兴趣点为中心的扩张掩模中采样。在兴趣点检测器定位兴趣点后,对 I 次迭代应用5 × 5形态扩张来扩大采样区域。在实际应用中,发现当射线的批处理规模较小时,这种方法可以加快优化速度。注意,如果 I 被设置为一个大的数字,兴趣区域抽样就会回到随机抽样。
Self-Supervising NeRF with iNeRF
除了在给定训练好的NeRF的情况下使用iNeRF来执行姿态估计,还探索使用估计的姿态来反馈到训练的NeRF表示。具体来说,首先训练一个NeRF给定一组训练RGB图像与已知的相机姿势{(Ii, Ti)}^Ntrain i=1,产生NeRF参数Θtrain。然后,使用iNeRF获取额外的未知姿态观测图像{Ii}^Ntest i=1,并求解估计姿态{ˆTi}^Ntest i=1。给定这些估计的姿势,然后可以使用自我监督的姿势标签将{(Ii,ˆTi)}^Ntest i=1添加到训练集中。这个过程允许在半监督的环境下对NeRF进行训练。
效果