STM32 GPIO模拟UART串口:外部时钟及TIM方式
STM32 GPIO模拟UART串口:外部时钟及TIM方式
在一些应用场景,MCU的硬件UART资源不足时,或者可用于硬件UART配置的管脚优先配置给了其它功能使用,就可以通过GPIO模拟UART功能以获得串口支持。本文介绍外部时钟及TIM方式,除了TX和RX两个GPIO管脚,只需要一个TIM资源实现UART串口收发。
这里以STM32F401CCU6芯片,STM32CUBEIDE开发平台实现模拟UART的范例。范例的UART通讯协议采用最常用的配置,即一个起始位,8个数据位,一个停止位,波特率为9600bps,码宽为104us。如果需要扩展高级功能,可以基于范例的基本实现进行修改。
TIM保持持续运行,TIM的计数溢出中断周期设置为UART串口波特率码宽的一半时间长度。当在某个TIM中断时,检测RX输入管脚从高电平已变为低电平,则识别为接收开始,然后在各个TIM中断时处理接收后续的字节位,并在接收结束时组装成字节。当要发送字节时,先设置发送标识和要发送的字节,然后在每个TIM中断发生时,按照时序关系发送各个字节位,实现UART串口的TX发送。
采用单个TIM实现的模拟UART串口,没有采用接收管脚的下降沿触发识别起始位,而是在TIM的中断时刻进行识别,不同次字节接收的位的采样时刻,存在一定的偏差,如果TIM时钟的抖动比较大,对于特定的采样时序设计,则二者配合起来,会产生一定的接收误码率,当TIM稳定, 则不会出现接收误码。所以本范例的方式,必须采用外部晶体供应时钟。
本范例在采用外时钟时无误码,采用内部时钟时会有一定误码率,可以作为一个案例进行比较测试以了解时钟源的选择对TIM稳定度与模拟时序方面的影响。
范例的工程设计为环回测试。RX管脚接收到一个字节后,TX管脚将这个字节发出去。接收和发送可以同时进行多个字节的操作。
工程配置
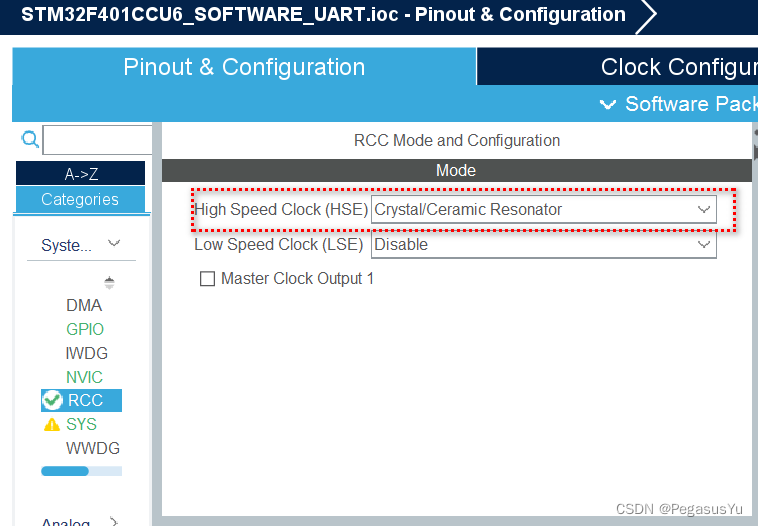
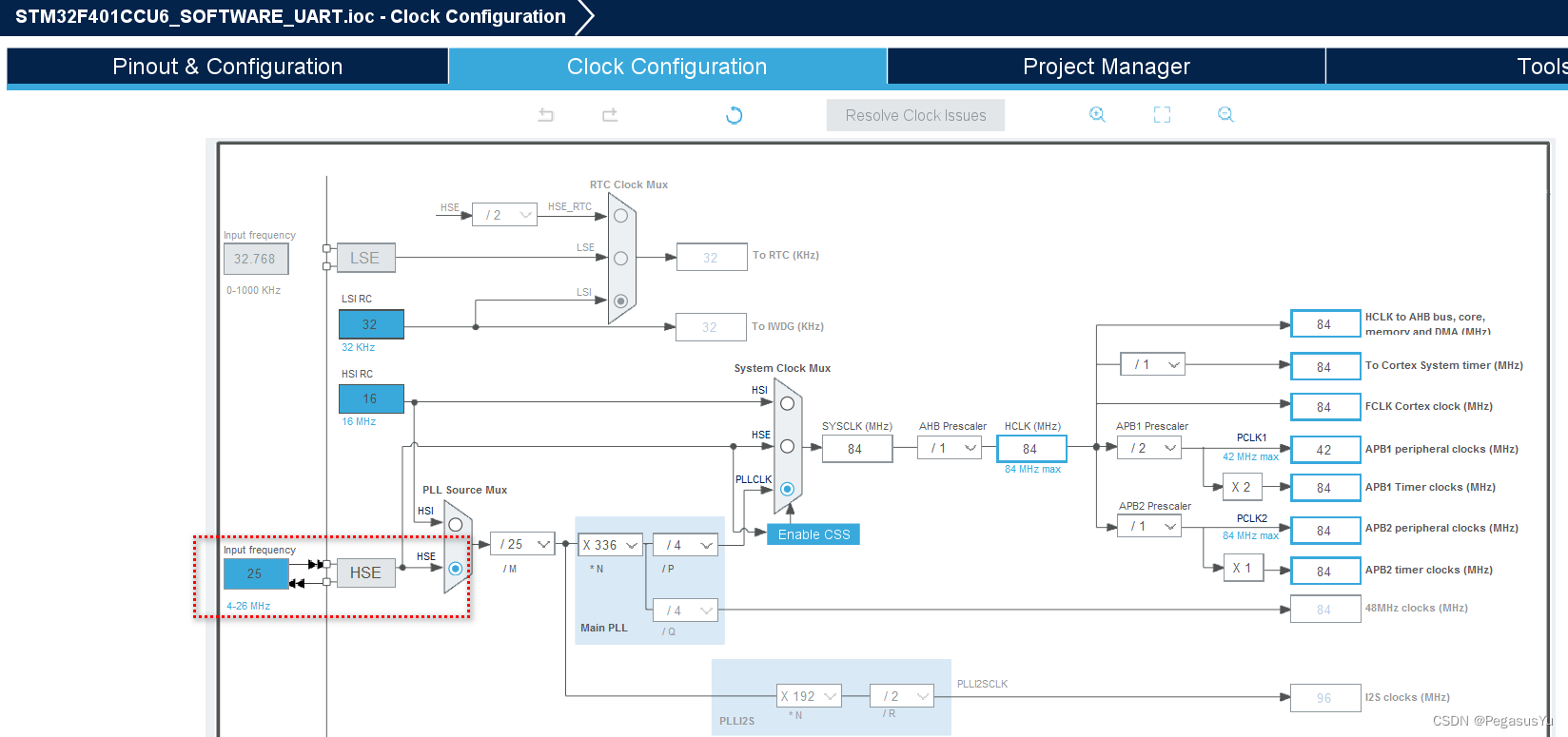
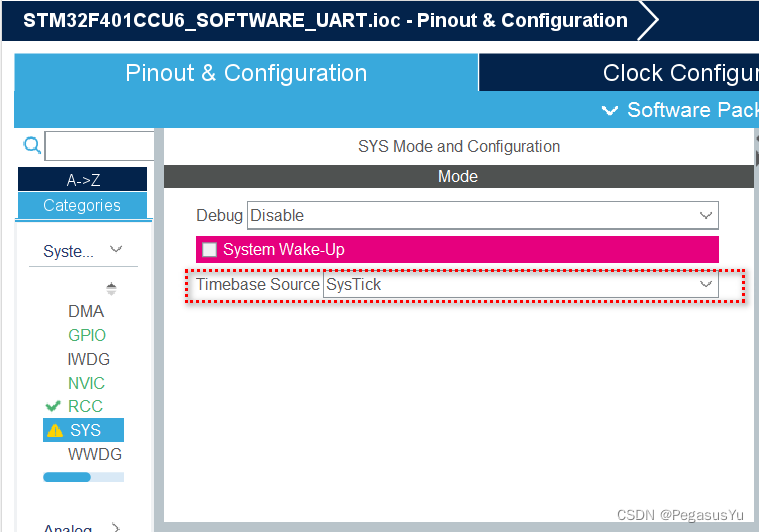
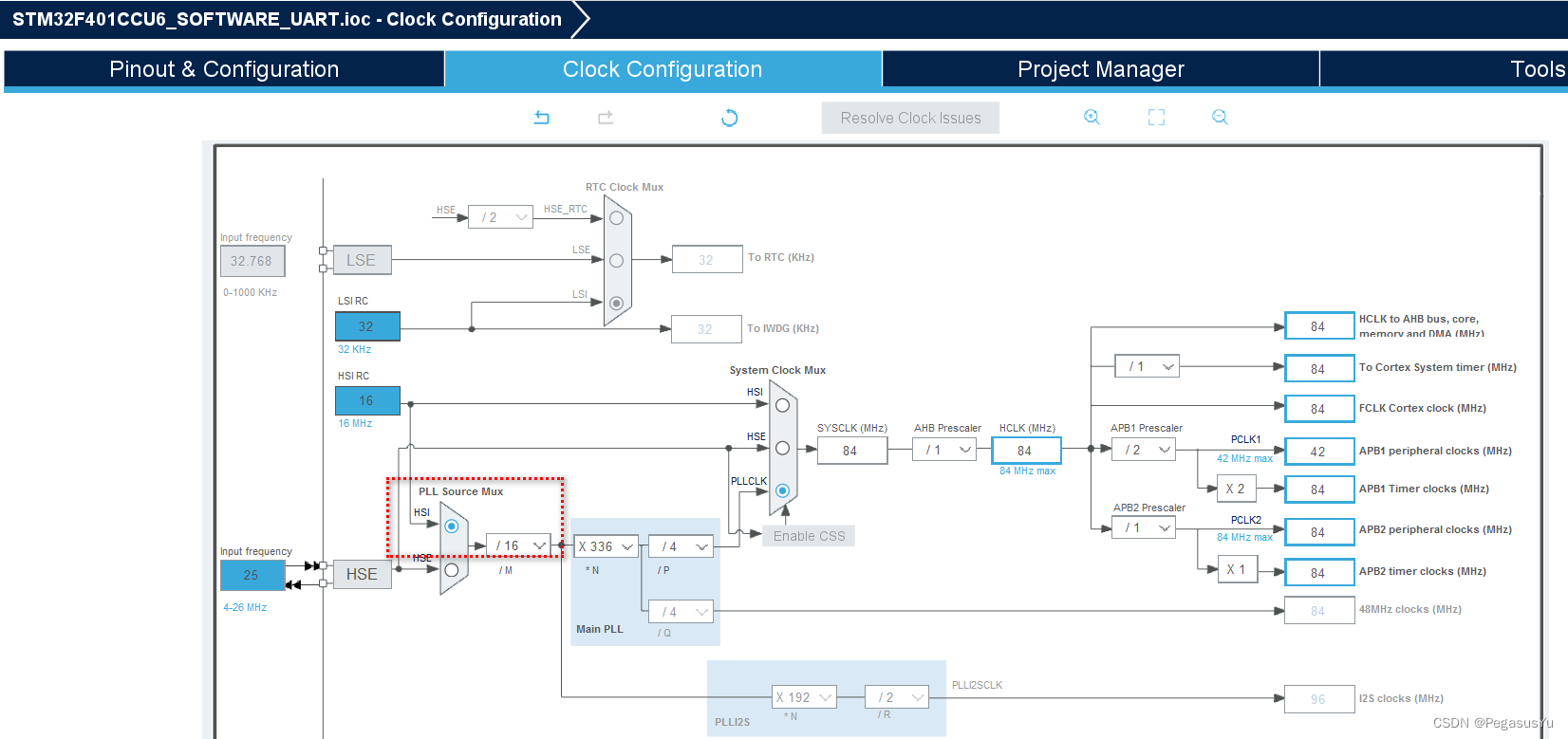
首先建立基本工程配置,设置外部时钟输入系统:
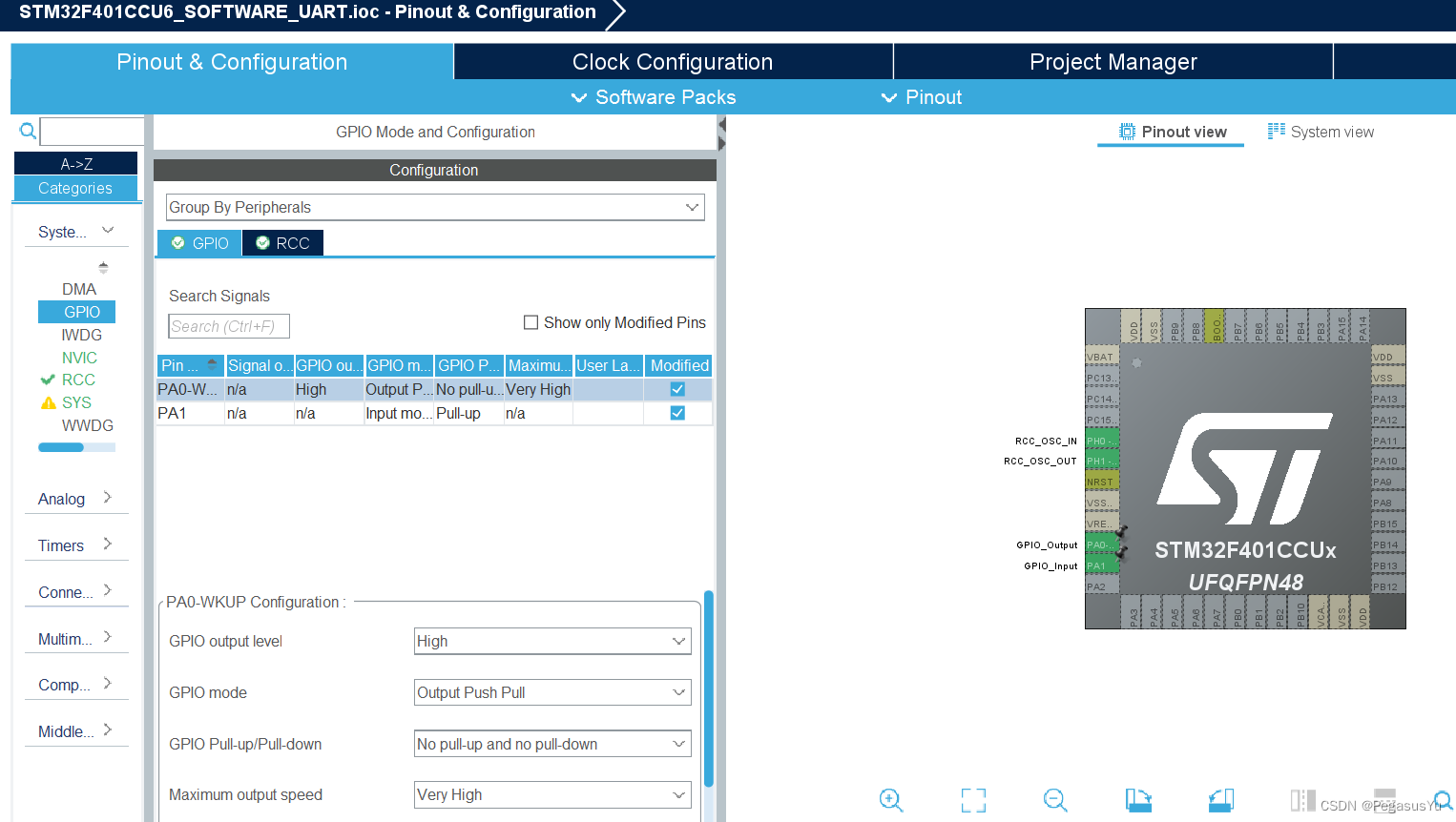
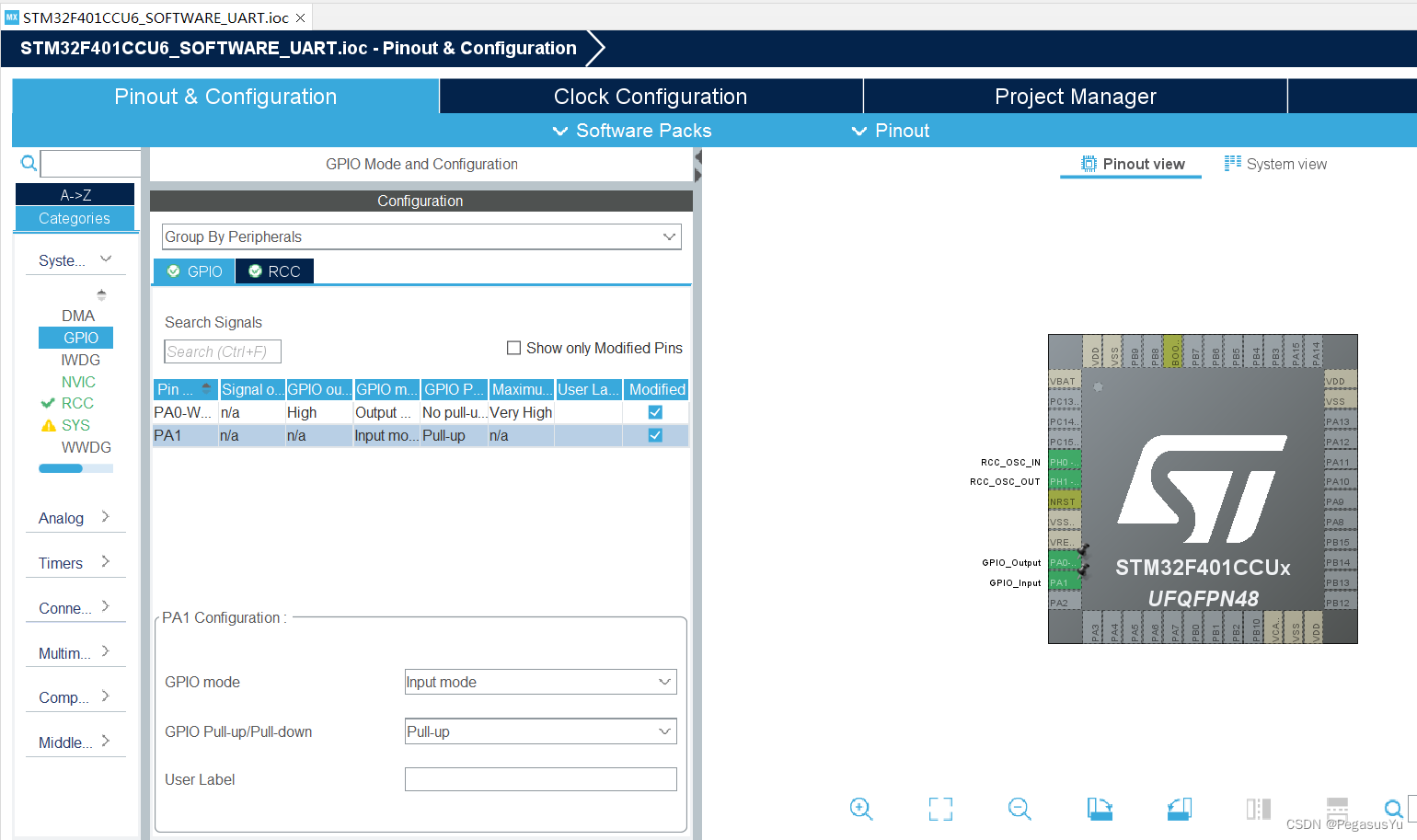
设置2个GPIO作为TX和RX,这里用PA0(TX)和PA1(RX):
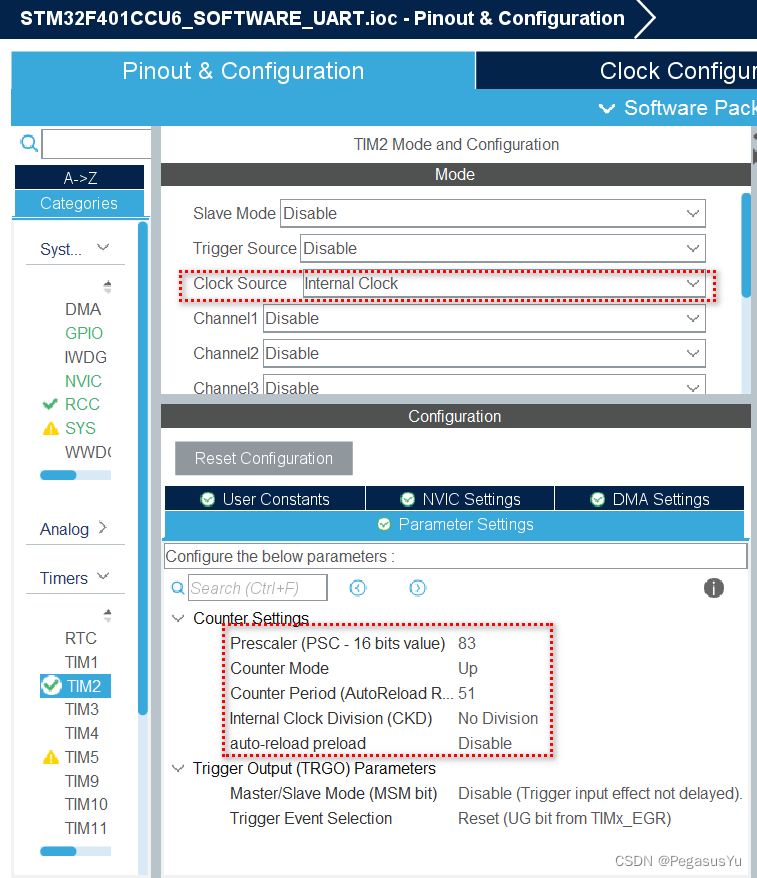
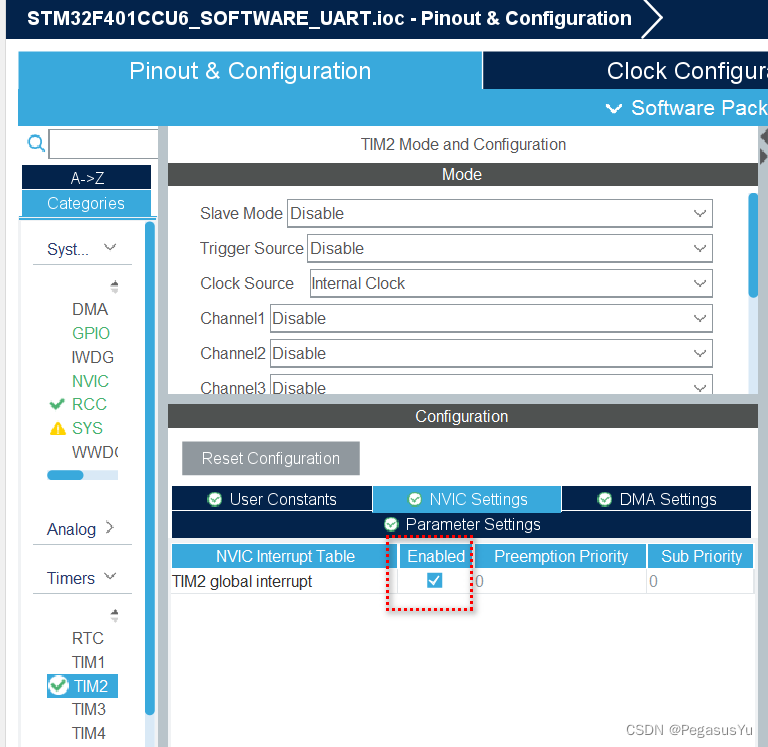
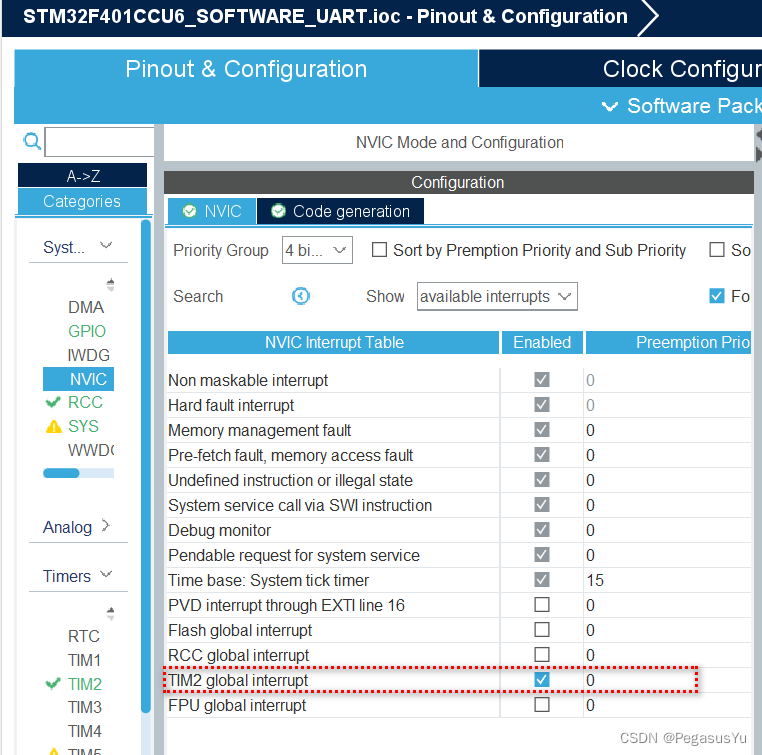
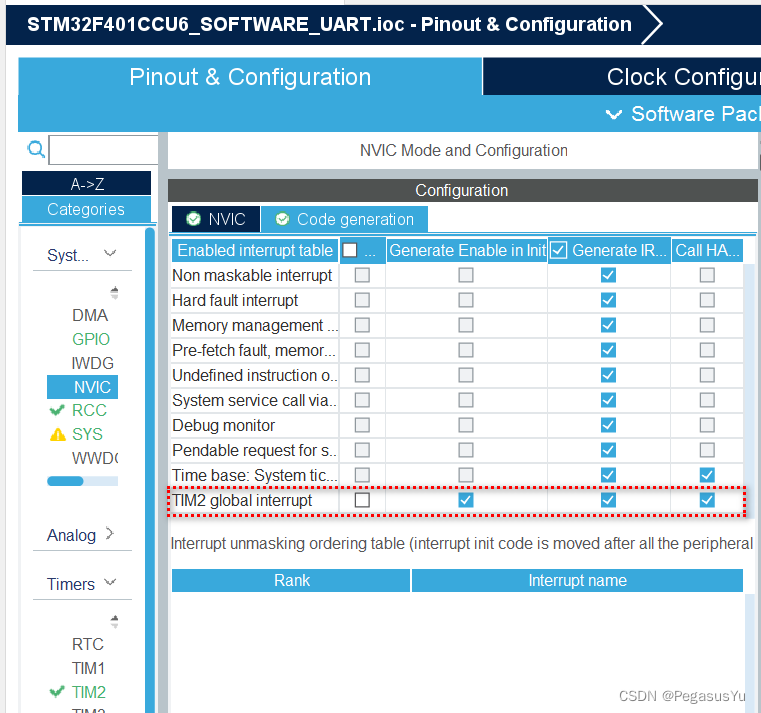
选择一个TIM设置为半波特率对应时间长度的周期,并配置中断,这里用TIM2:
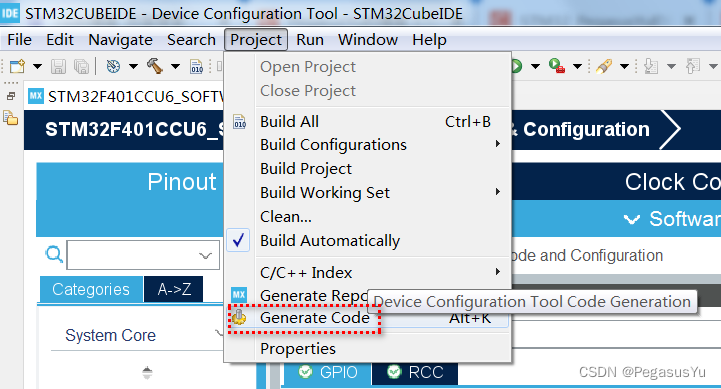
保存并生成基本工程代码:
代码实现
系统启动后,就可以启动中断模式的TIM2:
HAL_TIM_Base_Start_IT(&htim2);
如需对接收过程字节位的采样时间微调,可以采用微秒延时函数实现,参考 STM32 HAL us delay(微秒延时)的指令延时实现方式及优化
完整的main.c代码如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
//For this procedure of software UART
//External crystal must be used. One TIM is used.
//Written by Pegasus Yu in 2022
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
__IO float usDelayBase;
void PY_usDelayTest(void)
{
__IO uint32_t firstms, secondms;
__IO uint32_t counter = 0;
firstms = HAL_GetTick()+1;
secondms = firstms+1;
while(uwTick!=firstms) ;
while(uwTick!=secondms) counter++;
usDelayBase = ((float)counter)/1000;
}
void PY_Delay_us_t(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
void PY_usDelayOptimize(void)
{
__IO uint32_t firstms, secondms;
__IO float coe = 1.0;
firstms = HAL_GetTick();
PY_Delay_us_t(1000000) ;
secondms = HAL_GetTick();
coe = ((float)1000)/(secondms-firstms);
usDelayBase = coe*usDelayBase;
}
void PY_Delay_us(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t msNum = Delay/1000;
__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);
if(msNum>0) HAL_Delay(msNum);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
#define GPIO_OUTPUT_EXEC_DELAY_us 8
#define BaudRate_us 104 //for 9600bps
#define RBIT HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1)
#define TDL HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_RESET)
#define TDH HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_SET)
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim2;
/* USER CODE BEGIN PV */
#define buff_len 256
uint8_t tx_status = 0;
uint8_t rx_status = 0;
uint8_t txd[buff_len];
uint8_t rxd[buff_len];
uint32_t txd_index=0;
uint32_t rxd_index=0;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
PY_usDelayTest();
PY_usDelayOptimize();
HAL_TIM_Base_Start_IT(&htim2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
PY_Delay_us_t(1);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE2);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 83;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 51;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_SET);
/*Configure GPIO pin : PA0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pin : PA1 */
GPIO_InitStruct.Pin = GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
#define sampling_timing_opt_us 1
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
uint8_t bytebit;
static uint8_t bytebit_s;
if(htim==&htim2)
{
switch(rx_status)
{
case 0:{
bytebit = RBIT;
if(bytebit==0)
{
rx_status = 1;
}
break;
}
case 1:{//start bit
rx_status ++;
rxd[rxd_index] = 0;
break;
}
case 2:{//bit 1
PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 4:{//bit 2
PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 6:{//bit 3
PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 8:{//bit 4
PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 10:{//bit 5
PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 12:{//bit 6
PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 14:{//bit 7
PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 16:{//bit 8
PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 18:{//stop bit
PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
if(bytebit==1)
{
bytebit_s = rxd[rxd_index];
tx_status = 1; //Sending enable for loop-back test
if(rxd_index==(buff_len-1)) rxd_index=0;
else rxd_index++;
}
rx_status = 0;
break;
}
default: {
rx_status++;
break;
}
}
switch(tx_status)
{
case 0:{
TDH;
break;
}
case 2:{//start bit
TDL;
tx_status ++;
break;
}
case 4:{//bit 1
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 6:{//bit 2
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 8:{//bit 3
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 10:{//bit 4
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 12:{//bit 5
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 14:{//bit 6
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 16:{//bit 7
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 18:{//bit 8
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 20:{//stop bit
TDH;
tx_status ++;
break;
}
case 22:{//stop
tx_status = 0;
break;
}
default: {
tx_status++;
break;
}
}
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
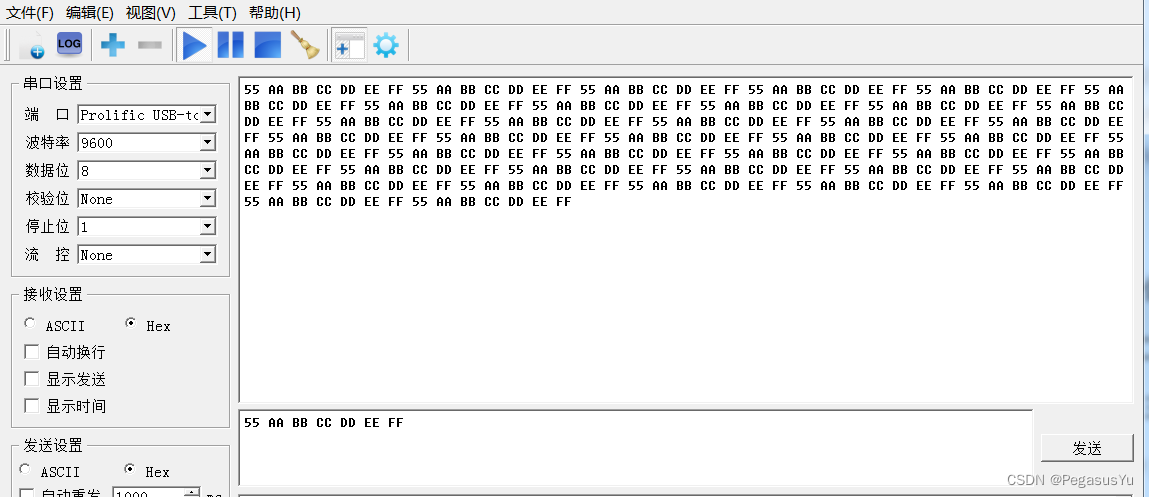
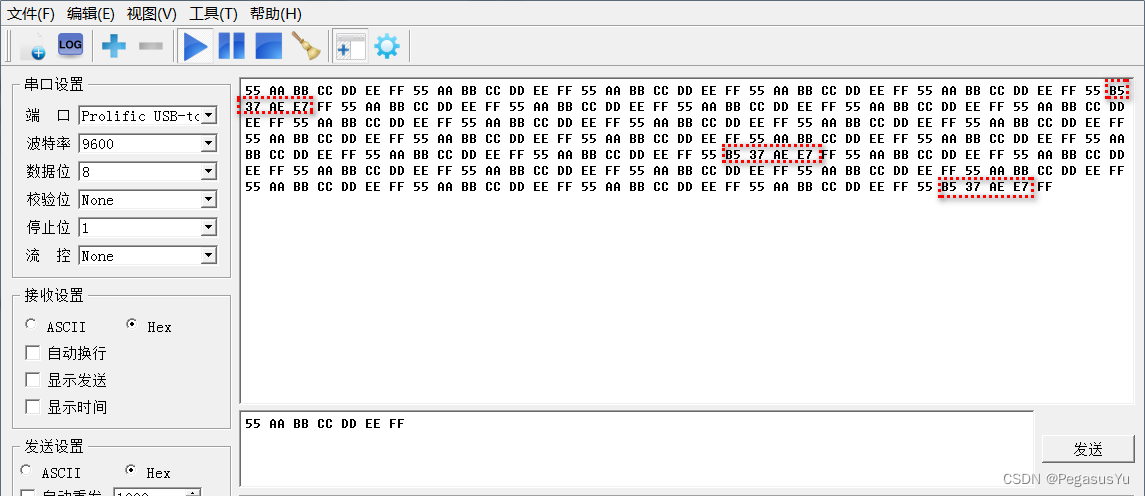
测试效果
通过串口工具向例程芯片快速多次点击发送数据,采用外部时钟时得到回送的数据无误码:
作为比较,采用内部时钟配置时,测试会出现误码:
–End–