10.3 串口实验(A7核和M4核)
文章目录
- 串口实验
- 分析
- 原理图
- 芯片手册
- RCC章节
- GPIO章节
- UART章节
- 实现代码
- A7核
- uart4.h
- uart4.c
- main.c
- M4核
- 运行结果
串口实验
分析
原理图
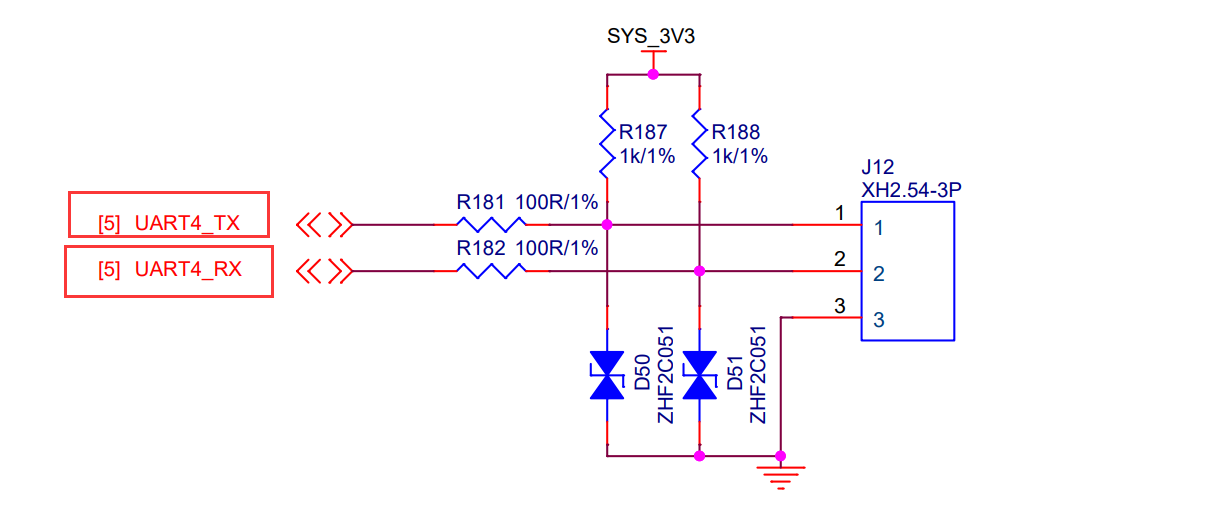
通过分析电路图可知:
UART4_RX------>PB2
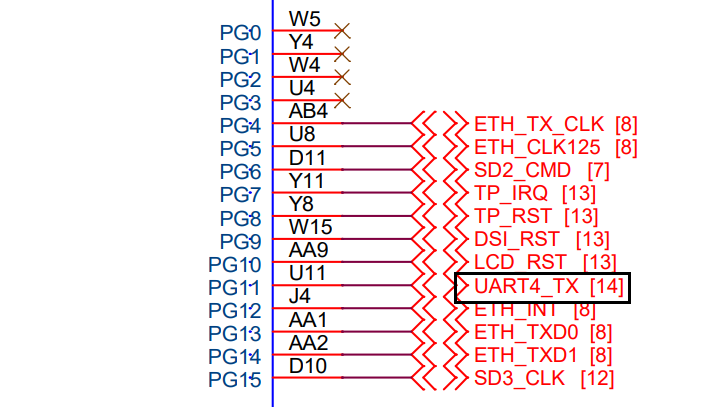
UART4_TX------>PG11

芯片手册
RCC章节
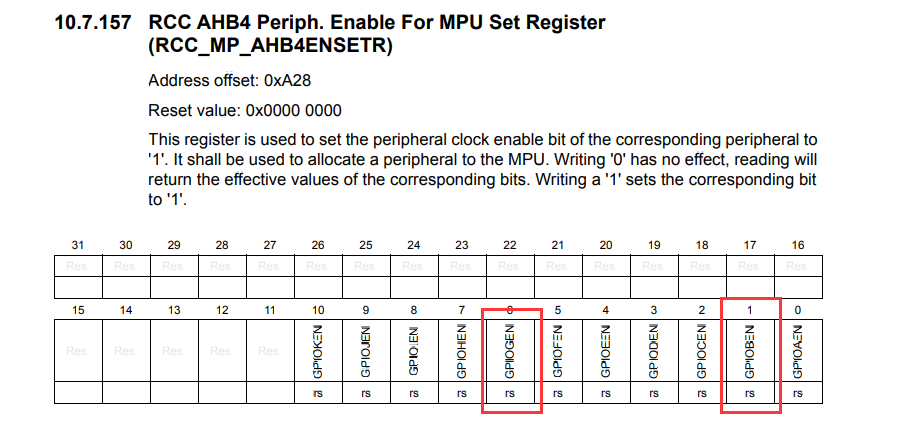
通过RCC_MP_AHB4ENSETR设置GPIOB和GPIOG控制器使能
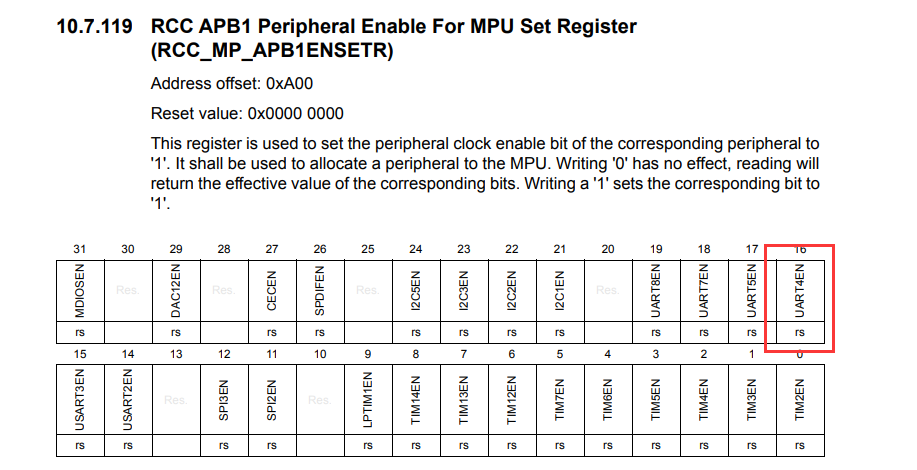
通过RCC_MP_APB1ENSETR寄存器设置UART4控制器使能
GPIO章节
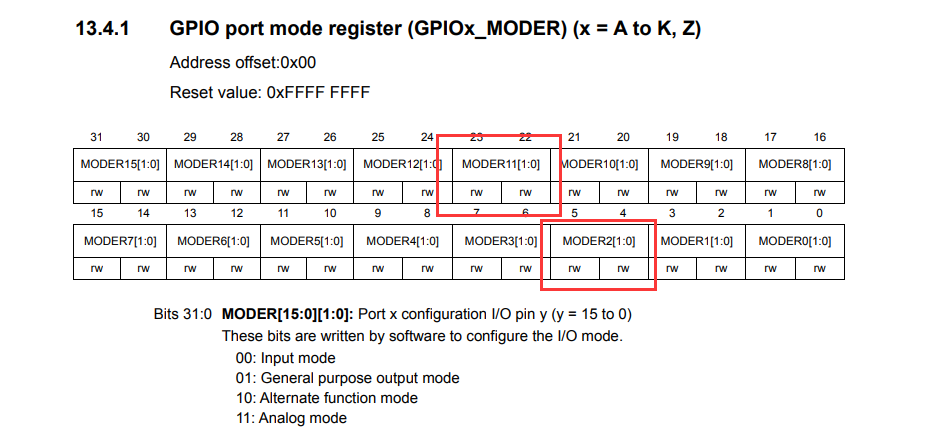
通过GPIOx_MODER寄存器,设置PB2和PG11引脚为复用功能
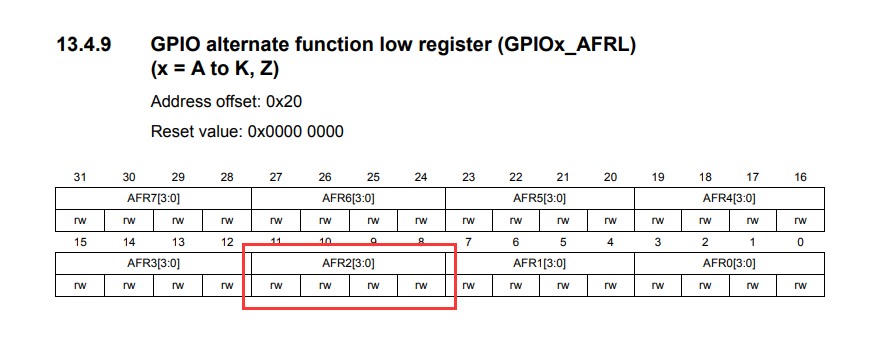
通过GPIOB_AFRL寄存器,设置PB2引脚为复用功能UART4_Rx
UART章节
通过以上分析可知,设置寄存器:
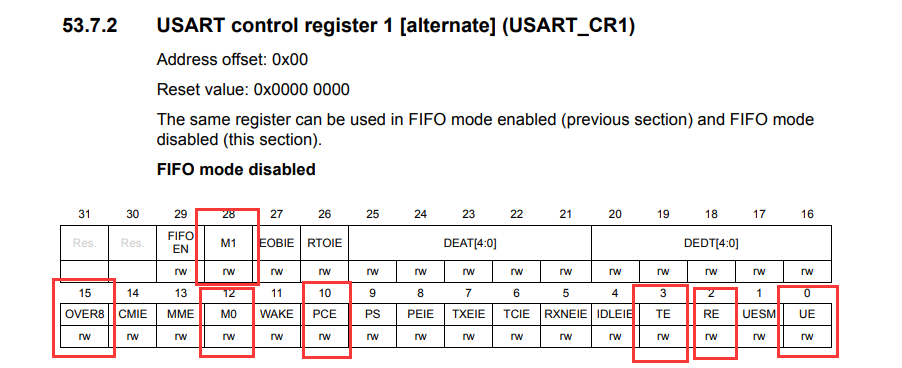
1.USART_CR1:设置数据位宽度,以及将相应位进行使能
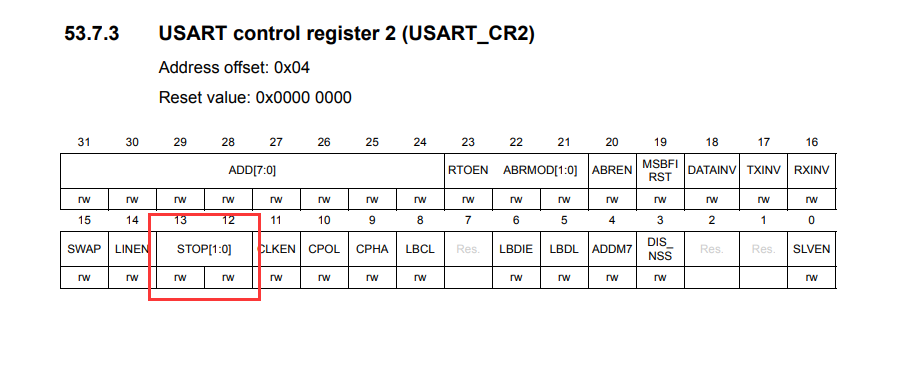
2.USART_CR2:设置停止位
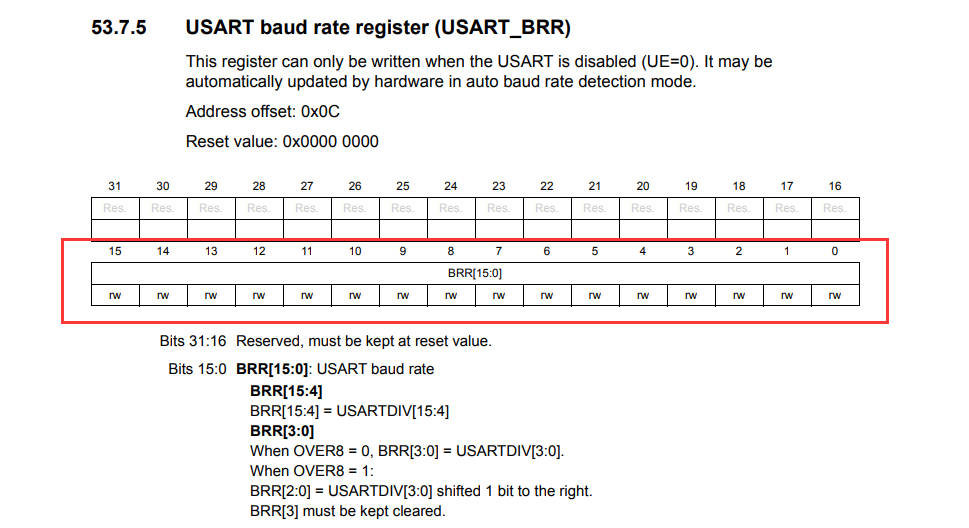
3.USART_BRR:设置波特率---->设置的采样率有关
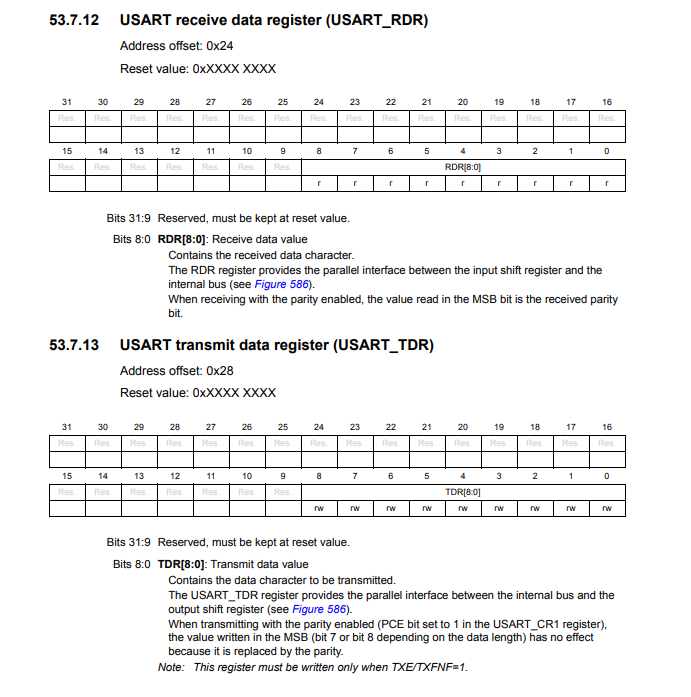
4.USART_RDR :设置接收数据寄存器
5.USART_TDR :设置发送数据寄存器
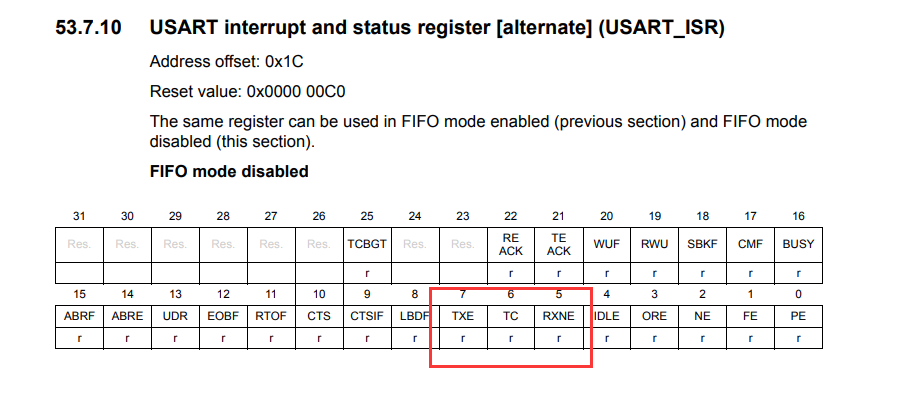
6.USART_ISR:设置状态寄存器
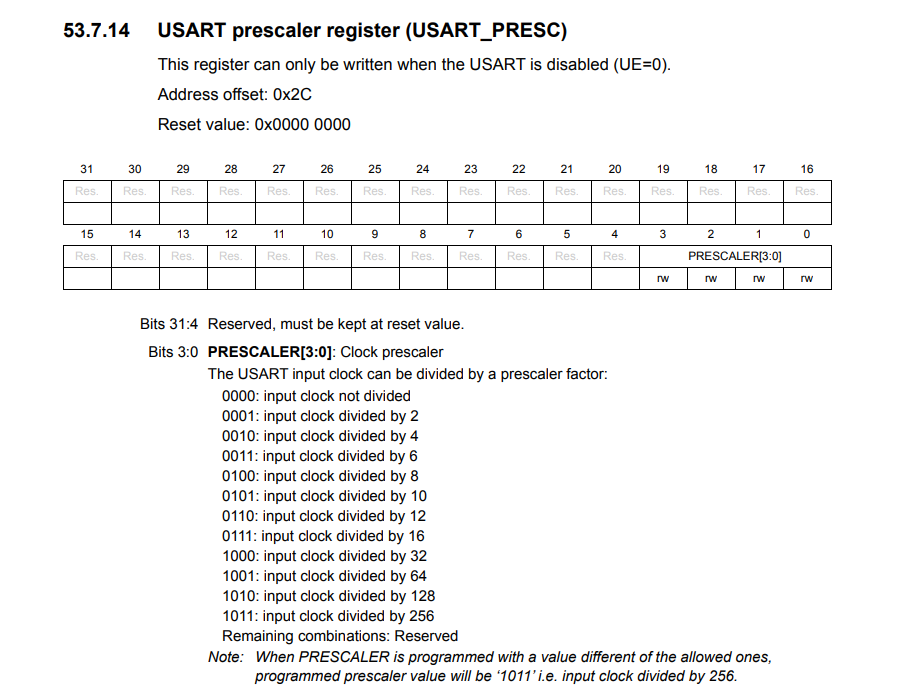
7.USART_PRESC :设置时钟分频器
实现代码
A7核
uart4.h
#ifndef __UART4_H__
#define __UART4_H__
#include "stm32mp1xx_gpio.h"
#include "stm32mp1xx_rcc.h"
#include "stm32mp1xx_uart.h"
void uart4_init();
void put_string(const char* str);
char* get_string();
#endif
uart4.c
#include "uart4.h"
void uart4_init()
{
RCC->MP_APB1ENSETR |=(0x1<<16);
RCC->MP_AHB4ENSETR |=(0x1<<1);
RCC->MP_AHB4ENSETR |=(0x1<<6);
GPIOB->MODER |=(0x1<<5);
GPIOB->MODER &=(~(0x1)<<4);
GPIOG->MODER |=(0x1<<23);
GPIOG->MODER &=(~(0x1)<<22);
GPIOB->AFRL &=(~(0x7<<8));
GPIOB->AFRL |=(0x1<<11);
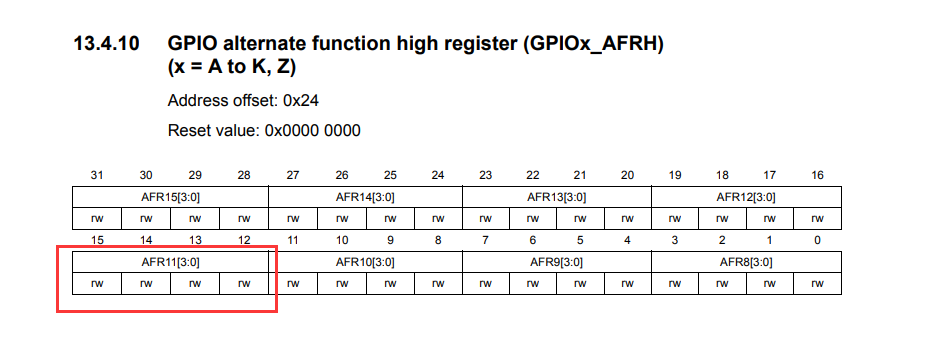
GPIOG->AFRH &=(~(0x9<<12));
GPIOG->AFRH |=(0x3<<13);
if(USART4->CR1&(0x1<<0))
{
USART4->CR1&=(~(0x1));
}
USART4->CR1&=(~(0x1<<12));
USART4->CR1&=(~(0x1<<28));
USART4->CR1&=(~(0x1<<15));
USART4->CR1&=(~(0x1<<10));
USART4->CR1 |=(0x1<<2);
USART4->CR1 |=(0x1<<3);
USART4->CR2 &=(~(0x3<<12));
USART4->PRESC &=(~(0xf));
USART4->BRR=0x22B;
USART4->CR1 |=0x1;
}
void put_string(const char* str)
{
const char *p=str;
while(*p!='\0')
{
while(!(USART4->ISR&(0x1<<7)));
USART4->TDR=*p;
while(!(USART4->ISR&(0x1<<6)));
p++;
}
}
char buf[32]={0};
char* get_string()
{
buf[0]='\n';
char ch='\0';
int n=1;
while(ch!='\r')
{
while(!(USART4->ISR&(0x1<<5)));
ch = USART4->RDR;
while(!(USART4->ISR&(0x1<<7)));
USART4->TDR=ch;
while(!(USART4->ISR&(0x1<<6)));
buf[n]=ch;
n++;
}
buf[n]='\n';
buf[n+1]='\0';
return buf;
}
main.c
#include "uart4.h"
int main()
{
uart4_init();
while(1)
{
put_string(get_string());
}
return 0;
}
M4核
使用CubMX创建工程
并完成上述分析过程中的寄存器相应位的修改
生成代码,并加入fputc函数
/* USER CODE BEGIN 0 */
int fputc(int ch,FILE* stream)
{
//判断发送寄存器是否为空
while(!(huart4.Instance->ISR & (0x1 << 7)));
//将要发送的数据放入到发送寄存器中
huart4.Instance->TDR = ch;
//判断是否为'\n'
if(ch == '\n')
{
//判断发送寄存器是否为空
while(!(huart4.Instance->ISR & (0x1 << 7)));
huart4.Instance->TDR = '\r';
}
return ch;
}
/* USER CODE END 0 */
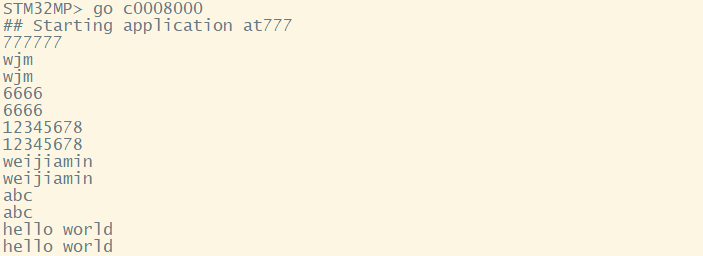
运行结果